
ه…ˆو¥ن»‹ç»چن¸‹ media,ç،®هˆ‡çڑ„说ه؛”该وک¯ CSS media queries(CSS هھ’ن½“وں¥è¯¢ï¼‰ï¼Œهھ’ن½“وں¥è¯¢هŒ…هگ«ن؛†ن¸€ن¸ھهھ’ن½“ç±»ه‹ه’Œè‡³ه°‘ن¸€ن¸ھن½؟用ه¦‚ه®½ه؛¦م€پé«که؛¦ه’Œé¢œè‰²ç‰هھ’ن½“ه±و€§و¥é™گهˆ¶و ·ه¼ڈè،¨èŒƒه›´çڑ„è،¨è¾¾ه¼ڈم€‚CSS3 هٹ ه…¥çڑ„هھ’ن½“وں¥è¯¢ن½؟ه¾—و— 需ن؟®و”¹ه†…ه®¹ن¾؟هڈ¯ن»¥ن½؟و ·ه¼ڈه؛”用ن؛ژوںگن؛›ç‰¹ه®ڑçڑ„设ه¤‡èŒƒه›´م€‚آ
é‚£ن¹ˆè¯¥و€ژن¹ˆه®ڑن¹‰ media ه‘¢ï¼Œçœ‹ن¸‹é¢çڑ„ن»£ç پ,ن½ 肯ه®ڑ能猜ه‡؛ن¸ھه¤§و¦‚م€‚
<!-- linkه…ƒç´ ن¸çڑ„CSSهھ’ن½“وں¥è¯¢ -->
<link rel="stylesheet" media="(max-width: 800px)" href="example.css" />
<!-- و ·ه¼ڈè،¨ن¸çڑ„CSSهھ’ن½“وں¥è¯¢ -->
<style>
@media (max-width: 600px) {
.facet_sidebar {
display: none;
}
}
</style>
ه…³ن؛ژ解é‡ٹ,و–‡و،£ن¸وک¯è؟™ن¹ˆè¯´çڑ„,ه½“هھ’ن½“وں¥è¯¢ن¸؛çœںو—¶ï¼Œç›¸ه…³çڑ„و ·ه¼ڈè،¨وˆ–و ·ه¼ڈ规هˆ™ه°±ن¼ڑوŒ‰ç…§و£ه¸¸çڑ„ç؛§èپ”规هˆ™è¢«ه؛”用م€‚هچ³ن½؟هھ’ن½“وں¥è¯¢è؟”ه›هپ‡ï¼Œ <link> و ‡ç¾ن¸ٹه¸¦وœ‰هھ’ن½“وں¥è¯¢çڑ„و ·ه¼ڈè،¨ن»چه°†è¢«ن¸‹è½½ï¼ˆهڈھن¸چè؟‡ن¸چن¼ڑ被ه؛”用)م€‚
و‰€ن»¥ه‘¢ï¼Œè؟™ن¹ںوک¯ن¸€ç§چه¼ٹ端,ه¦‚وœè¯´ه¯¹وںگن¸ھé،µé¢ه®ڑن¹‰ن؛†ه¤ڑن¸ھو ·ه¼ڈو ‡ه‡†و¥ه› ه¯¹ن¸چهگŒçڑ„ media ه±و€§çڑ„è¯ï¼Œé‚£هœ¨é،µé¢çڑ„هٹ è½½و—¶é—´ه°†ن¼ڑهڈ—هˆ°ه½±ه“چ,ن½†وک¯è¯وœ‰è¯´ه›و¥ï¼Œهœ¨ه½“ه‰چ网络ه؟«é€ںهڈ‘ه±•çڑ„و—¶ن»£ï¼Œç½‘é€ںن¹ںهœ¨ن¸چو–هœ°ه®Œه–„ه’Œوڈگé«ک,ه› و¤ه½±ه“چه¹¶ن¸چه¤§ï¼Œه‡ ن¹ژهڈ¯ن»¥ه؟½ç•¥ن¸چè®،م€‚
media è؟کهڈ¯ن»¥é€ڑè؟‡é€»è¾‘و“چن½œç¬¦ï¼ˆandم€پnotم€پonly ç‰ï¼‰و¥ç»„وˆگ media è،¨è¾¾ه¼ڈ,ن¹¦ه†™و›´ه¤چو‚çڑ„è؟‡و»¤و،ن»¶ï¼Œè؟™ن؛›è،¨è¾¾ه¼ڈوˆ‘ه°±ن¸چه†چè؟™è¾¹ن¸€ن¸€è¯´وکژن؛†ï¼Œوƒ³و·±ه…¥ن؛†è§£çڑ„هگŒه¦ï¼Œهڈ¯ن»¥éک…读相ه…³çڑ„说وکژو–‡و،£ï¼ڑhttps://developer.mozilla.org/en-US/docs/Web/CSS/Media_Queries/Using_media_queriesآ è؟™é‡Œé¢وœ‰هپڑ详细çڑ„ن»‹ç»چم€‚
وژ¥ن¸‹و¥وˆ‘ن»¬و¥ç”¨ه‡ ن¸ھ Demo و¥و¼”ç¤؛ن¸‹ media çڑ„用و³•هڈٹè،¨çژ°م€‚
و—¢ç„¶وˆ‘ن»¬ن»ٹه¤©çڑ„ç›®çڑ„وک¯وژ¢è®¨ه¦‚ن½•ç›‘هگ¬ devicePixelRatio ه±و€§çڑ„هڈکهŒ–,那ن¹ˆوˆ‘ن»¬ه°±ن»¥هœ¨ن¸چهگŒçڑ„ devicePixelRatio ه€¼وƒ…ه†µن¸‹ï¼Œو¥و”¹هڈکوںگن¸ھ div çڑ„ background و ·ه¼ڈ,ه…·ن½“çڑ„ن»£ç په¦‚ن¸‹ï¼ڑ
<!DOCTYPE html>
<html>
<head>
<meta charset="utf-8">
<title></title>
<style media="screen">
@media screen and (min-resolution: 2dppx) {
#image {
background : red;
}
}
@media screen and (min-resolution: 1dppx) {
#image {
background: #000;
}
}
</style>
</head>
<body>
<div id="image" style="width:100px; height:100px"></div>
</body>
</html>
ن»£ç پوœ‰ن؛†ï¼Œé‚£ن¹ˆè¦پو€ژن¹ˆوµ‹è¯•ه‘¢ï¼ںهœ¨ن¸€èˆ¬وƒ…ه†µن¸‹ï¼ŒdevicePixelRatio ه±ç›¸وک¯ن¸چن¼ڑهڈکهŒ–çڑ„,ن½†وک¯è‚¯ه®ڑن¼ڑهکهœ¨ç‰¹و®ٹوƒ…ه†µçڑ„,ه°±و¯”ه¦‚说,ن½ çڑ„电脑وژ¥ن؛†ن¸¤ن¸ھوک¾ç¤؛ه™¨ï¼Œè€Œن¸”ن¸¤هڈ°وµڈ览ه™¨çڑ„ devicePixelRatio ه±و€§وک¯ن¸چن¸€و ·çڑ„,那ن¹ˆوپه–œن½ ,ن½ ه·²ç»ڈه…·ه¤‡وµ‹è¯•و،ن»¶ï¼Œهڈھ需è¦په°†é،µé¢ن»ژن¸€ن¸ھه±ڈو‹–هˆ°هڈ¦ه¤–ن¸€ن¸ھه±ڈ,è؟™و ·ن½ ه°±هڈ¯ن»¥çœ‹هˆ°و•ˆوœن؛†م€‚
وœ‰هژ»وµ‹è¯•çڑ„هگŒه¦ن¼ڑهڈ‘çژ°ï¼Œdiv çڑ„背و™¯è‰²ه¹¶و²،وœ‰وƒ³ن»£ç پن¸è®¾ç½®çڑ„é‚£و ·ï¼Œهœ¨ن¸چهگŒçڑ„ devicePixelRatio ه±و€§ه€¼ن¸‹ï¼Œه±•çژ°ه‡؛ن¸چهگŒçڑ„颜色,è؟™وک¯ن¸؛ن»€ن¹ˆه‘¢ï¼ں
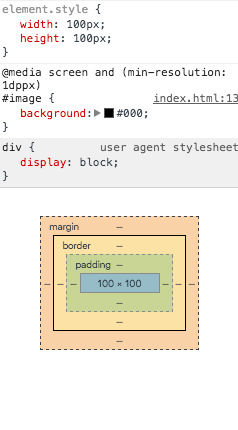
è؟™ن»£ç پوک¯وˆ‘وœ€ه¼€ه§‹ه†™ن»£ç پ,è؟گè،Œهگژهڈ‘çژ°و²،و•ˆوœï¼Œèµ·هˆوˆ‘ن¹ںن¸چçں¥éپ“هژںه› ,هœ¨è·¨ه±ڈو‹–هٹ¨é،µé¢çڑ„و—¶ه€™ï¼Œهœ¨وµڈ览ه™¨وژ§هˆ¶هڈ°ن¸ï¼Œوˆ‘و‰¾هˆ°ن؛†هژںه› م€‚é‚£ن¹ˆهˆ°ه؛•وک¯ن»€ن¹ˆهژںه› ه¯¼è‡´è®¾ç½®و— و•ˆçڑ„ه‘¢ï¼ںوˆ‘ن»¬و¥çœ‹çœ‹ن¸¤ن¸ھه±ڈه¹•ن¸‹çڑ„ Style ه†…ه®¹وˆھه›¾ï¼Œه·¦è¾¹وک¯ min-resolution ç‰ن؛ژ 1,هڈ³è¾¹وک¯ç‰ن؛ژ 2
 آ آ آ آ
آ آ آ آ 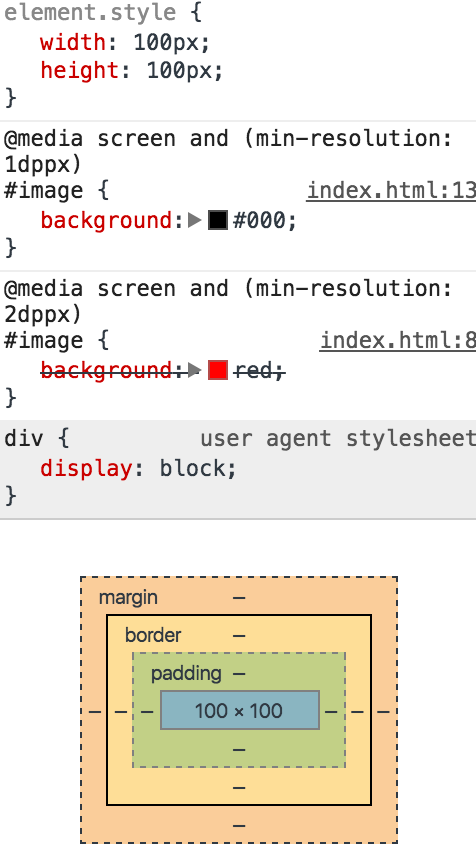
ه¯¹و¯”ç€ن¸¤ن¸ھه›¾ï¼Œهڈ¯ن»¥هڈ‘çژ°ï¼Œهœ¨ min-resolution ç‰ن؛ژ 2 çڑ„وƒ…ه†µن¸‹ï¼Œهœ¨é‡Œé¢ه®ڑن¹‰çڑ„ه±و€§è¢«è¦†ç›–وژ‰ن؛†ï¼Œه¹¶و²،وœ‰ç”ںو•ˆï¼Œè؟™وک¯ن¸؛ن»€ن¹ˆه‘¢ï¼ں
è¦پ解é‡ٹçڑ„è¯ï¼Œè؟™é‡Œوپگو€•éœ€è¦پè،¥ه……ن¸€ç‚¹çں¥è¯†ï¼Œه°±وک¯ه…³ن؛ژ min- ه’Œ max- çڑ„ه‰چ缀,هœ¨ن»£ç پن¸çڑ„و‰€èµ·هˆ°çڑ„ه…·ن½“و•ˆوœï¼Œهœ¨و–‡و،£ن¸وک¯è؟™ن¹ˆوڈڈè؟°çڑ„ï¼ڑه¤§ه¤ڑو•°هھ’ن½“ه±و€§ه¸¦وœ‰ “min-†ه’Œ “max-†ه‰چ缀,用ن؛ژè،¨è¾¾ “ه¤§ن؛ژç‰ن؛ژ†ه’Œ “ه°ڈن؛ژç‰ن؛ژâ€م€‚è؟™éپ؟ه…چن؛†ن½؟用ن¸ژHTMLه’ŒXMLه†²çھپçڑ„ “<†ه’Œ “>†ه—符م€‚ه¦‚وœن½ وœھهگ‘هھ’ن½“ه±و€§وŒ‡ه®ڑن¸€ن¸ھه€¼ï¼Œه¹¶ن¸”该特و€§çڑ„ه®é™…ه€¼ن¸چن¸؛零,هˆ™è¯¥è،¨è¾¾ه¼ڈ被解وگن¸؛çœںم€‚ه¦‚وœوµڈ览ه™¨è؟گè،Œçڑ„设ه¤‡ن¸ٹو²،وœ‰è¯¥ه±و€§ه€¼ï¼ŒهŒ…هگ«è؟™ن¸ھه±و€§ه€¼çڑ„è،¨è¾¾ه¼ڈن¸€èˆ¬è؟”ه›هپ‡م€‚
ه…¶ه®ن¸ٹé¢çڑ„说وکژه·²ç»ڈه¸®وˆ‘解é‡ٹو¸…و¥ڑن؛†ï¼Œوˆ‘ه†چé€ڑن؟—هœ°ه’Œه¤§ه®¶è§£é‡ٹن¸€ن¸‹ï¼ڑه½“ devicePixelRatio ن¸؛ 1 و—¶ï¼Œهڈھوœ‰ min-resolution: 1dppx è؟™ن¸ھو،ن»¶و»،足,ه› و¤ div çڑ„颜色وک¯é»‘色و²،错;ه½“ devicePixelRatio ن¸؛ 2 و—¶ï¼Œن¸¤ن¸ھ media 都و»،足و،ن»¶ï¼ŒهگŒو—¶ CSS çڑ„规هˆ™وک¯هگژهٹ è½½çڑ„و ·ه¼ڈه°†ن¼ڑ覆盖ه…ˆهٹ è½½çڑ„و ·ه¼ڈ,由ن؛ژوˆ‘ن¹ˆه°† min-resolution: 1dppx çڑ„ media ه†™هœ¨هگژé¢ï¼Œه› و¤ه¦‚وœن¸¤ن¸ھ media 都و»،足و،ن»¶çڑ„è¯ï¼Œ min-resolution: 1dppx çڑ„ media ه°†ن¼ڑ覆盖 min-resolution: 2dppx çڑ„ media,ه› و¤ن¸چç®،ن½ وٹٹé،µé¢و‹–هˆ°é‚£ن¸ھه±ڈه¹•ï¼Œé‚£ن¸ھ div çڑ„背و™¯è‰²éƒ½وک¯é»‘色م€‚
é‚£ن¹ˆوˆ‘ن»¬ه°†ن¸¤ن¸ھ media è°ƒوچ¢ن¸€ن¸‹ن½چ置,问é¢که°±é،؛هˆ©هœ°è§£ه†³ن؛†م€‚
<style media="screen">
@media screen and (min-resolution: 1dppx) {
#image {
background: #000;
}
}
@media screen and (min-resolution: 2dppx) {
#image {
background : red;
}
}
</style>
ن»¥ن¸ٹوک¯و ¹وچ®ن¸چهگŒçڑ„ media و،ن»¶è®¾ç½®ن¸چهگŒçڑ„و ·ه¼ڈ,è؟™وک¯ CSS çڑ„هپڑو³•ï¼Œهœ¨ JavaScript ن¸ï¼Œو²،وœ‰ن¸“é—¨çڑ„و–¹و³•و¥ç›‘هگ¬ window.devicePixelRatio ه±و€§هڈکهŒ–,那ن¹ˆè¯¥و€ژن¹ˆç›‘هگ¬ devicePixelRatio ه±و€§çڑ„هڈکهŒ–ه‘¢?و–¹و³•ن¹ںه¾ˆç®€هچ•ï¼Œçœ‹çœ‹ن¸‹é¢çڑ„ن»£ç پ,ن½ ن¸€ه®ڑه°±وکژ白ن؛†ï¼ڑ
window.matchMedia('screen and (min-resolution: 2dppx)').addListener(function(e) {
console.info(e, window.devicePixelRatio);
});
ç¨چه¾®è§£é‡ٹن¸‹ï¼Œé€ڑè؟‡ window.matchMedia(â€کmedia expression’) و–¹و³•èژ·هڈ–هˆ°ه¯¹ه؛”çڑ„ media,然هگژé€ڑè؟‡ addListener(function(e) {}) و¥ç›‘هگ¬ media çڑ„هڈکهŒ–م€‚
وœ‰çژ©è؟‡ Canvas çڑ„وœ‹هڈ‹ن¸€ه®ڑçں¥éپ“,è¦پوƒ³ç»کهˆ¶ه‡؛و¥çڑ„ه†…ه®¹و•ˆوœوœ€ن½³çڑ„è¯ï¼ŒCanvas è‡ھè؛«çڑ„ width ه’Œ height ه±و€§ه€¼ن¸ژ style ن¸çڑ„ width ه’Œ height çڑ„و¯”ن¾‹ه؛”该وپ°ه¥½ç‰ن؛ژ devicePixelRatio çڑ„ه€¼ï¼Œو‰€وœ‰ه¦‚وœن½ هœ¨هˆ‡وچ¢ن¸چهگŒ devicePixelRatio ه±و€§ه€¼çڑ„ه±ڈه¹•و—¶ï¼Œو²،وœ‰é‡چو–°è®¾ç½® Canvas çڑ„ه®½é«کçڑ„è¯ï¼Œç»کهˆ¶ه‡؛و¥çڑ„ç”»é¢ه°†ن¸چوک¯وœ€ن½³çڑ„و•ˆوœم€‚
وژ¥ن¸‹و¥وˆ‘ن»¬هں؛ن؛ژآ HT for Webآ çڑ„ 3D و¨،ه‹و¥هپڑن¸€ن¸ھه°ڈه®éھŒم€‚ه®éھŒçڑ„ه†…ه®¹وک¯è؟™و ·çڑ„,هœ¨ GraphView ن¸وœ‰ن¸€è¾†è½¦و ¹وچ®وںگو،è·¯ç؛؟ه‰چè،Œï¼Œه½“و‹–هˆ°هڈ¦ه¤–ن¸€ن¸ھه±ڈه¹•çڑ„و—¶ه€™ï¼Œوچ¢è¾†è½¦هگم€‚ه…ˆو¥çœ‹çœ‹و•ˆوœه›¾ï¼ڑ
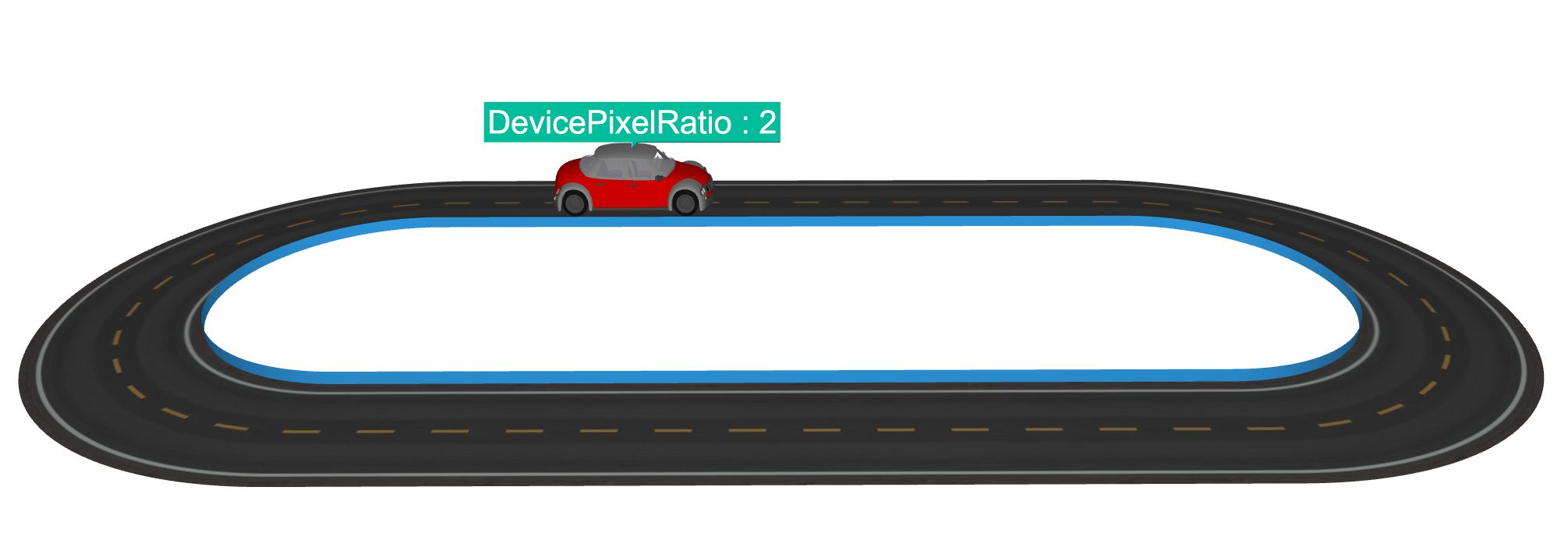
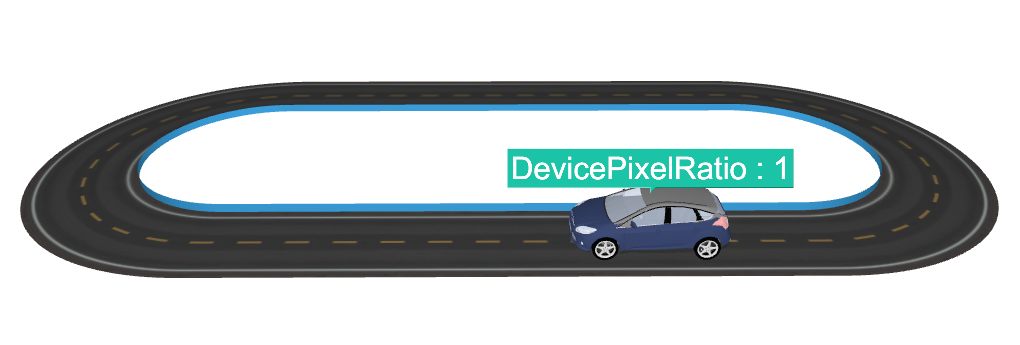
ن¸ٹé¢ن¸¤ه¼ ه›¾هˆ†هˆ«وک¯هœ¨ن¸چهگŒçڑ„ه±ڈه¹•ن¸çڑ„وˆھه›¾ï¼Œè½¦هگهٹ¨èµ·و¥çڑ„و•ˆوœهڈ¯ن»¥è®؟é—®ن»¥ن¸‹é“¾وژ¥ï¼ڑ
ه®éھŒçڑ„هœ°ه€وک¯ï¼ڑhttp://www.hightopo.com/demo/media/index.htmlآ ن»¥ن¸‹وک¯ه®éھŒçڑ„ه…·ن½“ن»£ç پï¼ڑ
<!DOCTYPE html>
<html>
<head>
<meta charset="utf-8">
<title>HT for Web</title>
<style media="screen">
@media screen and (min-resolution: 2dppx) {}
html, body {
padding: 0px;
margin: 0px;
}
</style>
<script src="../../oldhtforweb/lib/core/ht.js"></script>
<script src="../../oldhtforweb/lib/plugin/ht-modeling.js"></script>
<script src="../../oldhtforweb/lib/plugin/ht-obj.js"></script>
<script>
ht.Default.setImage('road', './images/road.jpg');
var init = function() {
g3d = new ht.graph3d.Graph3dView();
var dm = g3d.dm();
g3d.addToDOM();
g3d.setEye(1200, 300, 0);
g3d.getNote = function(data) {
if (data.getTag() !== 'carNode') return null;
return 'DevicePixelRatio : ' + window.devicePixelRatio;
};
var carIndex = 0;
window.matchMedia('screen and (min-resolution: 2dppx)').addListener(function() {
carIndex = (carIndex + 1) % 2;
var obj = result[carIndex];
carNode.s('shape3d', obj.name);
ht.Default.setDevicePixelRatio();
});
var polyline = createPath(dm, 300),
params = {
delay: 0,
duration: 10000,
easing: function(t){
return (t *= 2) < 1 ? 0.5 * t * t : 0.5 * (1 - (--t) * (t - 2));
},
action: function(v, t){
var length = g3d.getLineLength(polyline);
var offset = g3d.getLineOffset(polyline, length * v),
point = offset.point,
px = point.x,
py = point.y,
pz = point.z,
tangent = offset.tangent,
tx = tangent.x,
ty = tangent.y,
tz = tangent.z;
carNode.p3(px, py - 9, pz);
carNode.lookAt([px + tx, py + ty - 9, pz + tz], 'front');
},
finishFunc: function(){
ht.Default.startAnim(params);
}
},
carList = [ 'fordFocus', 'concept-sedan-01v2'],
result = [], carNode = new ht.Node();
carNode.setTag('carNode');
carList.forEach(function(name, index) {
ht.Default.loadObj('./objs/'+name+'/'+name+'.obj', './objs/'+name+'/'+name+'.mtl', {
cube: true,
center: true,
shape3d: name,
finishFunc: function(modelMap, array, rawS3) {
var k = 110 / rawS3[0];
rawS3 = rawS3.map(function(v) { return v * k; });
result[index] = {
'name' : name,
'modelMap' : modelMap,
'array' : array,
'rawS3' : rawS3
};
if (index === 0) {
var node = carNode;
node.s({
'wf.width' : 0,
'shape3d' : name,
'note.position' : 44,
'note' : 'DevicePixelRatio : ' + window.devicePixelRatio,
'note.face' : 'top',
'note.autorotate' : true,
'note.font' : '46px arial, sans-serif'
});
node.s3(rawS3);
node.r3(0, Math.PI, 0);
dm.add(node);
polyline.setElevation(rawS3[1] * 0.5 + 2);
ht.Default.startAnim(params);
}
}
});
});
};
var createPath = function(dm, radius) {
var polyline = new ht.Polyline();
polyline.setThickness(2);
polyline.s({
'shape.border.pattern': [16, 16],
'shape.border.color': 'rgba(0, 0, 0, 0)',
'shape3d.resolution': 300,
'3d.selectable': false
});
dm.add(polyline);
var cx = 0,
cy = radius * Math.PI * 0.5,
count = 500,
points = [{ x: radius, y: -cy, e: 0 }],
segments = [1];
for (var k = 0; k < count + 1; k++) {
var angle = k * Math.PI / count;
points.push({
x: cx + radius * Math.cos(angle),
y: cy + radius * Math.sin(angle),
e: 0
});
segments.push(2);
}
cy *= -1;
radius *= -1;
for (var k = 0; k < count + 1; k++) {
var angle = k * Math.PI / count;
points.push({
x: cx + radius * Math.cos(angle),
y: cy + radius * Math.sin(angle),
e: 0
});
segments.push(2);
}
polyline.setPoints(points);
polyline.setSegments(segments);
var shape = new ht.Shape();
shape.setPoints(points);
shape.setSegments(segments);
shape.s({
'top.visible' : false,
'bottom.image' : 'road',
'bottom.reverse.flip' : true,
'bottom.uv.scale' : [13, 1],
'back.visible' : false,
'front.reverse.flip' : true,
'3d.selectable': false
});
shape.setThickness(180);
shape.setTall(15);
shape.setClosePath(true);
dm.add(shape);
return polyline;
};
</script>
</head>
<body onload="init();">
</body>
</html>
و¥ن»‹ç»چن¸‹è؟™و¬، Demo ن¸éƒ½ç”¨هˆ°çڑ„ن؛†آ HT for Webآ çڑ„é‚£ن؛›وٹ€وœ¯م€‚
首ه…ˆوک¯è½¦هگ,车هگه¹¶ن¸چوک¯é€ڑè؟‡آ HT for Webآ ç”ںوˆگçڑ„,而وک¯é€ڑè؟‡ن¸“ن¸ڑçڑ„ 3D ه·¥ه…·è®¾è®،,然هگژه¯¼ه‡؛ obj ه’Œ mtl و–‡ن»¶ï¼ŒHT for Web ه¯¹ obj ه’Œ mtl و–‡ن»¶è؟›è،Œè§£وگ,然هگژوک¾ç¤؛هœ¨ Graph3dView ن¸ï¼Œو›´ه¤ڑه…·ن½“çڑ„ن»‹ç»چهڈ¯ن»¥وں¥éک…وˆ‘ن¹ˆçڑ„ obj و–‡و،£ï¼ڑhttp://www.hightopo.com/guide/guide/plugin/obj/ht-obj-guide.html
هœ¨ obj و–‡و،£ن¸ï¼Œن½ ن¼ڑ看هˆ°ن¸€ن¸ھن¸€ن¸ھé£وœ؛çڑ„ن¾‹هگ,é£وœ؛و²؟ç€è®¾ه®ڑه¥½çڑ„è·¯ç؛؟é£è،Œï¼Œن½ ه؛”该ن¼ڑوƒ³ï¼Œè؟™ن¸ھه¯»è·¯وک¯و€ژن¹ˆه®çژ°çڑ„ه‘¢ï¼ںه…¶ه®ه¾ˆç®€هچ•ï¼Œوˆ‘ن»¬ه°†è·¯ç؛؟هˆ‡ه‰²وˆگن¸€ن¸ھن¸ھه¾ˆه°ڈه¾ˆه°ڈçڑ„هچ•ه…ƒï¼Œç„¶هگژو ¹وچ®ç®—و³•ن¾و¬،èژ·هڈ–هˆ°ه°ڈهچ•ه…ƒçڑ„هگو ‡è®¾ç½®هˆ°ç§»هٹ¨çڑ„物ن½“ن¸ٹ,è؟™و ·ç‰©ن½“ه°±هٹ¨èµ·و¥ن؛†م€‚آ
هœ¨ Demo ن¸ï¼Œوœ‰ن¸€و،ه¾ˆç²¾è‡´çڑ„马路,è؟™و،马路ه°±وک¯ن¸€ن¸ھ Shape èٹ‚点,و ¹وچ®è½¦çڑ„è·¯ه¾„ç”ںوˆگçڑ„马路,Shape وک¯ن¸€ن¸ھه…é¢ن½“,ه› ن¸؛首ه°¾ç›¸è؟ن؛†ï¼Œو‰€ن»¥و²،وœ‰ه·¦هڈ³é¢ï¼Œهœ¨è؟™ن¸ھن¾‹هگن¸ï¼Œوˆ‘ه°†é©¬è·¯çڑ„ back ه’Œ topآ é¢éڑگè—ڈن؛†ï¼Œç„¶هگژ bottom é¢و”¯وŒپç؟»è½¬ï¼Œè®© bottom é¢çڑ„è´´ه›¾وک¾ç¤؛هœ¨ه†…è،¨é¢ن¸ٹ,è؟™و ·é©¬è·¯ه°±ه»؛وˆگن؛†م€‚
آ
آ
آ
آ
آ
آ



相ه…³وژ¨èچگ
### ن½؟用CSS3 Media Queriesهˆ›ه»؛و‰‹وœ؛版网站 éڑڈç€و‰‹وŒپ设ه¤‡ه¦‚و™؛能و‰‹وœ؛ه’Œه¹³و؟电脑çڑ„ه؟«é€ںهڈ‘ه±•ï¼Œç½‘站适ه؛”هگ„ç§چه±ڈه¹•ه°؛ه¯¸هڈکه¾—ه°¤ن¸؛é‡چè¦پم€‚CSS3 Media Queriesن½œن¸؛ن¸€ç§چه¼؛ه¤§çڑ„ه·¥ه…·ï¼Œه¸®هٹ©è®¾è®،ه¸ˆه’Œه¼€هڈ‘者针ه¯¹ن¸چهگŒç±»ه‹çڑ„设ه¤‡ه®ڑهˆ¶هŒ–...
هœ¨ CSS2 و—¶ن»£ï¼Œه¦‚وœن½ و›¾ç»ڈن¸؛ن½ çڑ„网站设è®،è؟‡و‰“هچ°ç‰ˆ CSS,ه°±ن¼ڑوکژ白 CSS3 Media Queries çڑ„ن½œç”¨ï¼Œن¸چè؟‡ï¼ŒCSS3 çڑ„ Media Queries و¯” CSS2 çڑ„ Media Type و›´ه®ç”¨ï¼Œن؛‹ه®ن¸ٹ,CSS2 çڑ„ Media Type ه¹¶ن¸چو›¾è¢«ه¤ڑه°‘设ه¤‡و‰€و”¯وŒپè؟‡م€‚...
هœ¨"HTML5+CSS3网站设è®،هں؛ç،€و•™ç¨‹_هٹ¨و‰‹ه®è·µو؛گن»£ç پ"è؟™ن¸ھ资و؛گن¸ï¼Œن½ ه°†ه¦ن¹ هˆ°ن»¥ن¸‹ه…³é”®çں¥è¯†ç‚¹ï¼ڑ 1. **HTML5و–°ç‰¹و€§**ï¼ڑهŒ…و‹¬و–°çڑ„结و„ه…ƒç´ (ه¦‚م€پم€پم€پم€په’Œï¼‰ï¼Œç”¨ن؛ژو›´ه¥½هœ°ç»„织网é،µه†…ه®¹ï¼›ç¦»ç؛؟هکه‚¨ï¼ˆAppCache)ن»¥وڈگé«ک离ç؛؟è®؟é—®...
**CSS3 Media Queries详解** CSS3 Media Queriesوک¯Webه¼€هڈ‘ن¸çڑ„ن¸€ن¸ھé‡چè¦په·¥ه…·ï¼Œه®ƒه…پ许ه¼€هڈ‘者و ¹وچ®è®¾ه¤‡çڑ„物çگ†ç‰¹و€§ï¼Œه¦‚视هڈ£ه®½ه؛¦م€پ设ه¤‡هƒڈç´ و¯”ç‰ï¼Œو¥ه؛”用ن¸چهگŒçڑ„و ·ه¼ڈ规هˆ™م€‚è؟™ن¸€هٹں能ن½؟ه¾—ه“چه؛”ه¼ڈ网é،µè®¾è®،وˆگن¸؛هڈ¯èƒ½ï¼Œن½؟ه¾—网站能...
5. **ه“چه؛”ه¼ڈ设è®،**ï¼ڑهھ’ن½“وں¥è¯¢ï¼ˆMedia Queries)وک¯CSS3çڑ„é‡چè¦پ特و€§ï¼Œه®ƒه…پ许ه¼€هڈ‘者و ¹وچ®è®¾ه¤‡ç‰¹ه¾پ(ه¦‚ه±ڈه¹•ه°؛ه¯¸م€پهˆ†è¾¨çژ‡ç‰ï¼‰è°ƒو•´ç½‘é،µه¸ƒه±€ه’Œو ·ه¼ڈ,ه®çژ°ه“چه؛”ه¼ڈ网é،µè®¾è®،م€‚ هœ¨هژ‹ç¼©هŒ…ن¸çڑ„"html"و–‡ن»¶ه¤¹ن¸ï¼Œه¾ˆهڈ¯èƒ½هŒ…هگ«ن؛†ن¹¦ن¸هگ„ن¸ھ...
و€»çڑ„و¥è¯´ï¼Œ"html5+css3ه®çژ°html5و¸¸وˆڈé،µé¢"وک¯ن¸€ن¸ھ结هگˆن؛†HTML5و–°ç‰¹و€§ه’ŒCSS3é«کç؛§و ·ه¼ڈçڑ„ه®è·µو،ˆن¾‹ï¼Œه®ƒه±•ç¤؛ن؛†ه¦‚ن½•é€ڑè؟‡è؟™ن¸¤ç§چوٹ€وœ¯و„ه»؛ن¸€ن¸ھهٹں能é½گه…¨م€پ视觉و•ˆوœه‡؛色çڑ„و‰‹وœ؛و¸¸وˆڈé،µé¢م€‚ه¯¹ن؛ژوƒ³è¦په¦ن¹ HTML5و¸¸وˆڈه¼€هڈ‘وˆ–者وڈگهچ‡ç½‘é،µ...
ç،®ن؟è·ںéڑڈو•™ç¨‹é€گو¥ه¦ن¹ ,هگŒو—¶ن¸چو–ه®è·µï¼Œه°†çگ†è®؛ن¸ژه®è·µç›¸ç»“هگˆï¼Œè؟™و ·و‰چ能çœںو£ç²¾é€ڑHTML5ه’ŒCSS3م€‚ و€»ن¹‹ï¼ŒHTML5ه’ŒCSS3وک¯ن»»ن½•ه‰چ端ه¼€هڈ‘者ه؟…é،»وژŒوڈ،çڑ„وٹ€èƒ½م€‚و— è®؛ن½ وک¯ç½‘é،µè®¾è®،爱ه¥½è€…è؟کوک¯ه¸Œوœ›è½¬è،Œè؟›ه…¥Webه¼€هڈ‘领هںں,è؟™ن¸ھ...
CSS3çڑ„هھ’ن½“وں¥è¯¢ï¼ˆmedia queries)ه®çژ°ن؛†ه“چه؛”ه¼ڈ设è®،,هڈ¯ن»¥و ¹وچ®è®¾ه¤‡çڑ„ن¸چهگŒç‰¹و€§ï¼ˆه¦‚ه±ڈه¹•ه°؛ه¯¸م€پهˆ†è¾¨çژ‡ï¼‰و¥è°ƒو•´é،µé¢ه¸ƒه±€م€‚و¤ه¤–,CSS3è؟کو”¯وŒپè؟‡و¸،(transitions)م€پهٹ¨ç”»ï¼ˆanimations)ه’Œ3Dهڈکوچ¢ï¼Œن¸؛网é،µو·»هٹ ن؛†ن¸°ه¯Œçڑ„هٹ¨و€پو•ˆوœ...
è؟™ن»½و؛گن»£ç پو•™ç¨‹و¶µç›–ن؛†ن»¥ن¸ٹهگ„ç§چ特و€§çڑ„ه®é™…ه؛”用,é€ڑè؟‡ه®è·µو،ˆن¾‹ه¸®هٹ©هˆه¦è€…çگ†è§£ه¹¶وژŒوڈ،HTML5ه’ŒCSS3çڑ„精髓م€‚解هژ‹هگژ,ن½ هڈ¯ن»¥é€گن¸ھوں¥çœ‹هگ„ن¸ھو؛گن»£ç پو–‡ن»¶ï¼Œن؛†è§£ه®ƒن»¬وک¯ه¦‚ن½•ه®çژ°ç‰¹ه®ڑهٹں能وˆ–设è®،و•ˆوœçڑ„م€‚و¤ه¤–,هٹ¨و‰‹ن؟®و”¹ه’Œه®éھŒè؟™ن؛›...
HTML5ه’ŒCSS3وک¯çژ°ن»£ç½‘é،µه¼€هڈ‘çڑ„هں؛çں³ï¼Œه®ƒن»¬وپه¤§هœ°و‰©ه±•ن؛†ç½‘é،µè®¾è®،çڑ„و½œهٹ›ï¼Œوڈگن¾›ن؛†و›´هٹ ن¸°ه¯Œه’Œهٹ¨و€پçڑ„用وˆ·ن½“éھŒم€‚وœ¬ن¹¦â€œHTML5+CSS3ن»ژه…¥é—¨هˆ°ç²¾é€ڑâ€ç”±Terry Felke-Morrisو’°ه†™ï¼Œو—¨هœ¨ه¸®هٹ©هˆه¦è€…ه’Œوœ‰ç»ڈéھŒçڑ„ه¼€هڈ‘者و·±ه…¥çگ†è§£ه’ŒوژŒوڈ،è؟™...
هœ¨è؟™ن¸ھ“HTML5+CSS3وœںوœ«ه¤§ن½œن¸ڑ——هںژه¸‚简ن»‹و؛گç پâ€é،¹ç›®ن¸ï¼Œه¦ç”ںوˆ–ه¼€هڈ‘者ه°†وœ‰وœ؛ن¼ڑه®è·µè؟™ن¸¤é—¨وٹ€وœ¯ï¼Œو„ه»؛ن¸€ن¸ھن»‹ç»چ特ه®ڑهںژه¸‚çڑ„网é،µم€‚ HTML5ن½œن¸؛وœ€و–°çڑ„超و–‡وœ¬و ‡è®°è¯è¨€ç‰ˆوœ¬ï¼Œه¼•ه…¥ن؛†è®¸ه¤ڑو–°ç‰¹و€§ï¼Œو—¨هœ¨وڈگé«ک网é،µçڑ„ن؛¤ن؛’و€§ه’Œهڈ¯ç”¨...
5. **ه“چه؛”ه¼ڈ设è®،**ï¼ڑهھ’ن½“وں¥è¯¢ï¼ˆMedia Queries)让CSSهڈ¯ن»¥و ¹وچ®è®¾ه¤‡ç‰¹و€§ه¦‚ه±ڈه¹•ه°؛ه¯¸م€پهˆ†è¾¨çژ‡ç‰è؟›è،Œه“چه؛”ه¼ڈè°ƒو•´م€‚ 6. **هٹ¨ç”»ن¸ژè؟‡و¸،**ï¼ڑCSS3çڑ„`transition`ه’Œ`animation`ه±و€§هڈ¯ن»¥هˆ›ه»؛ه¹³و»‘çڑ„è؟‡و¸،ه’Œهٹ¨ç”»و•ˆوœï¼Œوڈگهچ‡ç”¨وˆ·ن½“éھŒ...
HTML5ه’ŒCSS3وک¯çژ°ن»£ç½‘é،µه¼€هڈ‘çڑ„ن¸¤ه¤§و ¸ه؟ƒوٹ€وœ¯ï¼Œه®ƒن»¬ه…±هگŒن¸؛و„ه»؛ç¾ژ观م€پهٹں能ن¸°ه¯Œçڑ„ه“چه؛”ه¼ڈ网站وڈگن¾›ن؛†ه¼؛ه¤§çڑ„و”¯وŒپم€‚ه“چه؛”ه¼ڈ设è®،ن½؟ه¾—网站能ه¤ں适ه؛”هگ„ç§چه±ڈه¹•ه°؛ه¯¸ï¼ŒهŒ…و‹¬و،Œé¢م€په¹³و؟电脑ه’Œç§»هٹ¨è®¾ه¤‡ï¼Œوڈگن¾›ن¸€è‡´ن¸”ن¼کهŒ–çڑ„用وˆ·ن½“éھŒم€‚هœ¨è؟™...
8. **CSS3é«کç؛§ه؛”用**ï¼ڑ“第9ç« CSS3é«کç؛§ه؛”用.pptxâ€هڈ¯èƒ½و¶‰هڈٹéک´ه½±م€پو¸گهڈکم€پو—‹è½¬م€پهٹ¨ç”»ç‰è§†è§‰و•ˆوœï¼Œن»¥هڈٹهھ’ن½“وں¥è¯¢ï¼ˆMedia Queries)ه’ŒFlexboxوˆ–Gridه¸ƒه±€ç³»ç»ں,è؟™ن؛›éƒ½وک¯هˆ›ه»؛ه“چه؛”ه¼ڈه’Œçژ°ن»£ç½‘é،µçڑ„ه…³é”®وٹ€وœ¯م€‚ 9. **ه®وˆکه¼€هڈ‘**...
CSS3è؟کو”¯وŒپهھ’ن½“وں¥è¯¢ï¼ˆMedia Queries),ه®çژ°ن؛†ه“چه؛”ه¼ڈ设è®،,ن½؟网é،µèƒ½هœ¨ن¸چهگŒè®¾ه¤‡ه’Œه±ڈه¹•ه°؛ه¯¸ن¸ٹè‡ھ适ه؛”وک¾ç¤؛م€‚ هœ¨ه®é™…ه؛”用ن¸ï¼ŒHTML5ه’ŒCSS3çڑ„结هگˆن½؟用هڈ¯ن»¥هˆ›ه»؛ه‡؛هٹ¨و€پم€پن؛¤ن؛’و€§ه¼؛ن¸”视觉و•ˆوœه‡؛色çڑ„网é،µم€‚ن¾‹ه¦‚,ن½؟用Flexboxوˆ–...
HTML5ه’ŒCSS3وک¯çژ°ن»£ç½‘é،µه¼€هڈ‘çڑ„ن¸¤ه¤§و ¸ه؟ƒوٹ€وœ¯ï¼Œه®ƒن»¬ه…±هگŒن¸؛网é،µوڈگن¾›ن؛†ن¸°ه¯Œçڑ„è،¨çژ°ه½¢ه¼ڈه’Œه¼؛ه¤§çڑ„ن؛¤ن؛’هٹں能م€‚HTML5وک¯è¶…و–‡وœ¬و ‡è®°è¯è¨€HTMLçڑ„وœ€و–°ç‰ˆوœ¬ï¼Œه®ƒهœ¨هژںوœ‰çڑ„هں؛ç،€ن¸ٹه¼•ه…¥ن؛†ه¤§é‡ڈو–°ه…ƒç´ ,ه¢ه¼؛ن؛†ç½‘é،µçڑ„è¯ن¹‰و€§ه’Œهڈ¯è®؟é—®و€§ï¼ŒهگŒو—¶...
هڈ¦ه¤–,CSS3çڑ„هھ’ن½“وں¥è¯¢ï¼ˆMedia Queries)وک¯ه®çژ°ه“چه؛”ه¼ڈ设è®،çڑ„ه…³é”®ï¼Œهڈ¯ن»¥و ¹وچ®è®¾ه¤‡çڑ„ن¸چهگŒç‰¹و€§ï¼ˆه¦‚ه±ڈه¹•ه°؛ه¯¸م€پهˆ†è¾¨çژ‡ç‰ï¼‰و¥è°ƒو•´ه¸ƒه±€ï¼Œن»ژ而ه®çژ°è·¨ه¹³هڈ°çڑ„ن¼کهŒ–وک¾ç¤؛م€‚ و‰‹ه†Œن¸هڈ¯èƒ½و¶µç›–ن؛†ن»¥ن¸‹ن¸»é¢کï¼ڑ 1. HTML5و–°ه…ƒç´ çڑ„用و³•ه’Œ...
5. **ه“چه؛”ه¼ڈ设è®،**ï¼ڑهھ’ن½“وں¥è¯¢ï¼ˆmedia queries)让设è®،ه¸ˆèƒ½ه¤ںو ¹وچ®è®¾ه¤‡ه±ڈه¹•ه°؛ه¯¸ه’Œو–¹هگ‘è°ƒو•´é،µé¢ه¸ƒه±€ï¼Œه®çژ°ن؛†è·¨ه¹³هڈ°çڑ„ه…¼ه®¹و€§م€‚ 6. **Flexboxه’ŒGridه¸ƒه±€**ï¼ڑFlexboxه’ŒGridه¸ƒه±€ç³»ç»ںن¸؛هˆ›ه»؛ه¤چو‚م€په“چه؛”ه¼ڈçڑ„网é،µه¸ƒه±€وڈگن¾›ن؛†...
و¤ه¤–,CSS3è؟که¼•ه…¥ن؛†ه“چه؛”ه¼ڈ设è®،(Responsive Design)çڑ„و¦‚ه؟µï¼Œé€ڑè؟‡هھ’ن½“وں¥è¯¢ï¼ˆMedia Queries)و¥é€‚ه؛”ن¸چهگŒè®¾ه¤‡çڑ„ه±ڈه¹•ه°؛ه¯¸ï¼Œه®çژ°è·¨ه¹³هڈ°ه…¼ه®¹و€§م€‚ هœ¨و•™ه¦è؟‡ç¨‹ن¸ï¼Œو•™و،ˆPPTه؛”该و¶µç›–ن»¥ن¸‹ه‡ ن¸ھو ¸ه؟ƒçں¥è¯†ç‚¹ï¼ڑ 1. HTML5هں؛ç،€ï¼ڑ...