В В В В В з»Ҷеҝғзҡ„жңӢеҸӢиӮҜе®ҡе·Із»ҸеҸ‘зҺ°KinectдёҠй•ҝдәҶдёүеҸӘзңјзқӣпјҢе…¶дёӯдёҖдёӘжҳҜеҪ©иүІж‘„еғҸеӨҙпјҢеҸҰеӨ–дёӨдёӘж·ұеәҰж‘„еғҸеӨҙпјҢдёҖдёӘиҙҹиҙЈеҸ‘е°„зәўеӨ–е…үпјҢдёҖдёӘиҙҹиҙЈжҺҘ收пјҢиҝҷж ·пјҢжҲ‘们дҫҝиғҪйҖҡиҝҮKinectеҫ—еҲ°дёҖе№…еҪ©иүІеӣҫеғҸе’ҢдёҖе№…ж·ұеәҰеӣҫеғҸгҖӮеҰӮжһңеӨ§е®¶еҜ№Kniectзңјзқӣзҡ„жҠҖжңҜз»ҶиҠӮж„ҹе…ҙи¶ЈпјҢиҜ·зӮ№еҮ»иҝҷйҮҢ
гҖӮ
В В В В В
е°Ҹж–Өзҡ„第дёҖдёӘиҢғдҫӢпјҢдҫҝжҳҜйҖҡиҝҮOpenNIеҫ—еҲ°еҪ©иүІе’Ңж·ұеәҰеӣҫеғҸе’ҜпјҢд»Јз ҒдёҚй•ҝпјҢе…¶дёӯдёҖйғЁеҲҶеҸӮиҖғдәҶHereskyз«ҘйһӢзҡ„ж–Үз« гҖҠйҖҸйҒҺ
OpneNI еҗҲдҪө Kinect ж·ұеәҰд»ҘеҸҠеҪ©иүІеҪұеғҸиіҮж–ҷгҖӢ
пјҢжӯӨеӨ–пјҢе°Ҹж–ӨиЎҘе……дәҶOpenCVзҡ„жҳҫзӨәйғЁеҲҶпјҢдҪҝиҢғдҫӢжӣҙдёәзӣҙи§ӮгҖӮ
В
#include <stdlib.h>
#include <iostream>
#include <string>
//гҖҗ1гҖ‘
#include <XnCppWrapper.h>
#include "opencv/cv.h"
#include "opencv/highgui.h"
using namespace std;
using namespace cv;
void CheckOpenNIError( XnStatus result, string status )
{
if( result != XN_STATUS_OK )
cerr << status << " Error: " << xnGetStatusString( result ) << endl;
}
int main( int argc, char** argv )
{
XnStatus result = XN_STATUS_OK;
xn::DepthMetaData depthMD;
xn::ImageMetaData imageMD;
//OpenCV
IplImage* imgDepth16u=cvCreateImage(cvSize(640,480),IPL_DEPTH_16U,1);
IplImage* imgRGB8u=cvCreateImage(cvSize(640,480),IPL_DEPTH_8U,3);
IplImage* depthShow=cvCreateImage(cvSize(640,480),IPL_DEPTH_8U,1);
IplImage* imageShow=cvCreateImage(cvSize(640,480),IPL_DEPTH_8U,3);
cvNamedWindow("depth",1);
cvNamedWindow("image",1);
char key=0;
//гҖҗ2гҖ‘
// context
xn::Context context;
result = context.Init();
CheckOpenNIError( result, "initialize context" );
// creategenerator
xn::DepthGenerator depthGenerator;
result = depthGenerator.Create( context );
CheckOpenNIError( result, "Create depth generator" );
xn::ImageGenerator imageGenerator;
result = imageGenerator.Create( context );
CheckOpenNIError( result, "Create image generator" );
//гҖҗ3гҖ‘
//map mode
XnMapOutputMode mapMode;
mapMode.nXRes = 640;
mapMode.nYRes = 480;
mapMode.nFPS = 30;
result = depthGenerator.SetMapOutputMode( mapMode );
result = imageGenerator.SetMapOutputMode( mapMode );
//гҖҗ4гҖ‘
// correct view port
depthGenerator.GetAlternativeViewPointCap().SetViewPoint( imageGenerator );
//гҖҗ5гҖ‘
//read data
result = context.StartGeneratingAll();
//гҖҗ6гҖ‘
result = context.WaitNoneUpdateAll();
while( (key!=27) && !(result = context.WaitNoneUpdateAll( )) )
{
//get meta data
depthGenerator.GetMetaData(depthMD);
imageGenerator.GetMetaData(imageMD);
//гҖҗ7гҖ‘
//OpenCV output
memcpy(imgDepth16u->imageData,depthMD.Data(),640*480*2);
cvConvertScale(imgDepth16u,depthShow,255/4096.0,0);
memcpy(imgRGB8u->imageData,imageMD.Data(),640*480*3);
cvCvtColor(imgRGB8u,imageShow,CV_RGB2BGR);
cvShowImage("depth", depthShow);
cvShowImage("image",imageShow);
key=cvWaitKey(20);
}
//destroy
cvDestroyWindow("depth");
cvDestroyWindow("image");
cvReleaseImage(&imgDepth16u);
cvReleaseImage(&imgRGB8u);
cvReleaseImage(&depthShow);
cvReleaseImage(&imageShow);
context.StopGeneratingAll();
context.Shutdown();
return 0;
}
В
В
В
иҝҷиҫ№е°Ҹж–Өз”ұдёҠеҲ°дёӢи§ЈйҮҠдёҖжҠҠпјҡ
гҖҗ1гҖ‘<XnCppWrapper.h>дҫҝжҳҜOpenNIзҡ„ж–Ү件еӨҙдәҶпјҢдҪҝз”ЁOpenNIзҡ„иҜқпјҢзӣ®еүҚеҸӘиҰҒincludeиҝҷдёӘе°ұиЎҢгҖӮ
гҖҗ2гҖ‘
DepthGeneratorе’ҢImageGeneratorпјҢе°Ҹж–Өз§°д№ӢдёәеӣҫеғҸз”ҹжҲҗеҷЁпјҢеүҚиҖ…иҙҹиҙЈж·ұеәҰеӣҫеғҸпјҢеҗҺиҖ…иҙҹиҙЈеҪ©иүІеӣҫеғҸгҖӮеҲӣе»әдёҖдёӘз”ҹжҲҗеҷЁйқһеёёз®ҖеҚ•пјҢйҰ–
е…ҲжҲ‘们иҰҒеҲқе§ӢеҢ–дёҖдёӘContextдёҠдёӢж–ҮпјҢ然еҗҺжҠҠContextдҪңдёәCreateеҮҪж•°зҡ„еҸӮж•°пјҢдҫҝеҸҜд»ҘеҲӣе»әз”ҹжҲҗеҷЁдәҶгҖӮ
гҖҗ3гҖ‘XnMapOutputModeжҳҜз”ЁжқҘи®ҫе®ҡз”ҹжҲҗеҷЁзҡ„еҸӮж•°зҡ„пјҢиҝҷиҫ№е°Ҹж–Өи®ҫе®ҡдәҶеҲҶиҫЁзҺҮдёә640*480пјҲж ҮеҮҶпјүпјҢ30fpsйҮҮж ·гҖӮ
гҖҗ4гҖ‘
depthGenerator.GetAlternativeViewPointCap().SetViewPoint(
imageGenerator)иҝҷеҸҘиҜқд№ҹи®ёдјҡи®©еӨ§е®¶з–‘жғ‘пјҢе®ғжҳҜз”ЁжқҘи°ғж•ҙи§Ҷи§’зҡ„гҖӮдёәд»Җд№ҲиҰҒи°ғж•ҙе‘ўпјҹеӣ дёәKinectзҡ„дёүеҸӘзңјй•ҝеңЁдёҚеҗҢзҡ„ең°ж–№пјҢжүҖд»Ҙз”»е№…дёҖиҮҙзҡ„
ж·ұеәҰж‘„еғҸеӨҙе’ҢеҪ©иүІж‘„еғҸеӨҙпјҢе®ғ们зңӢеҮәжқҘзҡ„жҷҜзү©жҳҜжңүеҒҸе·®зҡ„пјҢиҝҷйҮҢOpenNIжҸҗдҫӣдәҶеҮҪж•°иҝӣиЎҢеҜ№йҪҗгҖӮиҝҷйҮҢпјҢе°Ҹж–ӨжҠҠж·ұеәҰз”ҹжҲҗеҷЁзҡ„и§Ҷи§’пјҢи®ҫе®ҡдёәеҪ©иүІз”ҹжҲҗеҷЁзҡ„и§Ҷи§’гҖӮ
гҖҗ5гҖ‘и°ғз”ЁStartGeneratingAll()еҗҺпјҢз”ҹжҲҗеҷЁд»¬дҫҝејҖе§ӢдёҠзҸӯдәҶпјҢеҰӮжһңиҰҒз»“жқҹпјҢе°ұStopGeneratingAll()еҮҪж•°гҖӮ
гҖҗ6гҖ‘
е°Ҫз®Ўз”ҹжҲҗеҷЁд»¬еңЁе·ҘдҪңдәҶпјҢдҪҶ他们дёҖзӣҙеҝҷзқҖеҗ„иҜ»еҗ„зҡ„пјҢжІЎжңүдәәеҚҸи°ғпјҢиҮӘе·ұдёҚдјҡд№–д№–жҠҠжңҖж–°зҡ„иө„ж–ҷз»ҷжҲ‘们гҖӮжҲ‘们и°ғз”ЁgetMetaData()ж–№жі•еүҚпјҢйңҖиҰҒдҪҝз”Ё
WaitAnyUpdateAll()гҖҒWaitOneUpdateAll()гҖҒWaitNoneUpdateAll()е’Ң
WiatAndUpdateAll()дёӯзҡ„дёҖз§ҚгҖӮеҠҹиғҪеҰӮе…¶еҗҚпјҢиҝҷиҫ№е°Ҹж–ӨдҪҝз”Ёзҡ„жҳҜWaitNoneUpdateAll()еҮҪж•°пјҢе®ғжҜ”иҫғжҡҙеҠӣпјҢдёҚз®Ўз”ҹжҲҗеҷЁжңүжІЎ
жңүиҜ»еҲ°ж–°ж•°жҚ®пјҢжҲ‘иҝҷиҫ№е…Ҳжӣҙж–°дәҶеҶҚиҜҙгҖӮеӨ§е®¶еҸҜд»ҘиҜ•иҜ•е…¶е®ғдёүдёӘпјҢзңӢзңӢж•ҲжһңгҖӮ
гҖҗ7гҖ‘иҝҷиҫ№дҪҝз”ЁOpenNIиҺ·еҫ—еӣҫеғҸMetaDataж•°жҚ®еҗҺпјҢе°Ҹж–ӨйҖҡиҝҮдёҖзі»еҲ—еҮҪж•°пјҢиҪ¬жҚўдёәOpenCVзҡ„IplImageеӣҫеғҸзұ»еһӢпјҢ然еҗҺиҫ“еҮәгҖӮдё»иҰҒеҸӮиҖғдәҶиҝҷзҜҮж–Үз«
гҖӮ
В В В В В В В
еҜ№дәҺж·ұеәҰMetaDataпјҢиҝҷиҫ№дҪҝз”ЁcvConvertScaleиҪ¬жҚўе°әеәҰпјҢжҲҗдёәзҒ°еәҰеҖј[0,255]зҡ„зҒ°еәҰеӣҫгҖӮеҜ№дәҺеҪ©иүІMetaDataпјҢдҪҝз”ЁcvCvtColorиҪ¬жҚўиүІеҪ©з©әй—ҙеҚіеҸҜгҖӮжҢүESCй”®еҸҜд»ҘйҖҖеҮәеҫӘзҺҜпјҢз»“жқҹзЁӢеәҸгҖӮ
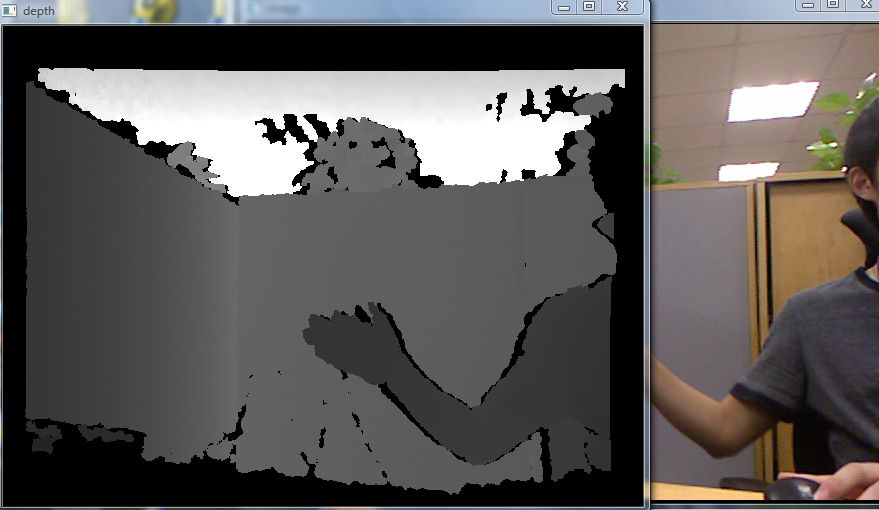
В В В В В В В жңҖз»Ҳж•ҲжһңеҰӮдёӢпјҡ
В
В В В В В еңЁзҒ°еәҰеӣҫдёӯзҒ°еәҰеҖј0жҳҫзӨәдёәй»‘иүІпјҢ255дёәзҷҪиүІпјҢжүҖд»ҘпјҢзҰ»Kinectиҝ‘зҡ„ең°ж–№пјҲжЎҢйқўпјүжҳҫзӨәдёәй»‘иүІпјҢдёӯй—ҙдёәдёҚеҗҢзЁӢеәҰзҡ„зҒ°иүІпјҢиҝңеӨ„пјҲеӨ©иҠұжқҝпјүжҳҫзӨәдёәзҷҪиүІгҖӮ
В
----------------------------------
дҪңиҖ…пјҡе°Ҹж–ӨпјҲйҷҲеҝ»пјү
жң¬ж–ҮеұһдәҺеҺҹеҲӣж–Үз« пјҢеҰӮйңҖиҪ¬иҪҪеј•з”ЁиҜ·жіЁжҳҺеҺҹж–ҮдҪңиҖ…е’Ңй“ҫжҺҘпјҢи°ўи°ўгҖӮ
еҲҶдә«еҲ°пјҡ




зӣёе…іжҺЁиҚҗ
еңЁи®Ўз®—жңәи§Ҷи§үйўҶеҹҹпјҢOpenNIпјҲOpen Natural InteractionпјүжҳҜдёҖдёӘејҖжәҗжЎҶжһ¶пјҢз”ЁдәҺдёҺдј ж„ҹеҷЁи®ҫеӨҮдәӨдә’пјҢеҰӮKinectпјҢд»ҘиҺ·еҸ–е’ҢеӨ„зҗҶж·ұеәҰеӣҫеғҸе’ҢеҪ©иүІеӣҫеғҸгҖӮOpenNIжҸҗдҫӣдәҶAPIпјҢдҪҝеҫ—ејҖеҸ‘иҖ…иғҪеӨҹиҪ»жқҫең°иҜ»еҸ–е’ҢжҳҫзӨәиҝҷдәӣеӣҫеғҸж•°жҚ®гҖӮеҸҰдёҖ...
иҜ»еҸ–并жҳҫзӨәkinectеҪ©иүІе’Ңж·ұеәҰдҝЎжҒҜзҡ„дёүз§Қж–№ејҸгҖӮ 1.KinectSDK+MFC ж–№жі•жҳҜпјҡеҲ©з”ЁKinectSDKиҜ»еҮәеҪ©иүІеӣҫе’Ңж·ұеәҰеӣҫпјҢеҲ©з”ЁMFCзӘ—жҳҫзӨә 2.KinectSDK+OpenCV ж–№жі•жҳҜпјҡеҲ©з”ЁKinectSDKиҜ»еҮәеҪ©иүІеӣҫе’Ңж·ұеәҰеӣҫпјҢеҲ©з”ЁopenCVжҳҫзӨә 3.OpenNIе’Ң...
ж Үйўҳдёӯзҡ„вҖңKinectиҜ»еҸ–ж·ұеәҰеӣҫеғҸе’ҢеҪ©иүІеӣҫеғҸ并жҳҫзӨәвҖқжҳҜжҢҮдҪҝз”Ёеҫ®иҪҜзҡ„Kinectи®ҫеӨҮжқҘиҺ·еҸ–е’ҢеӨ„зҗҶж·ұеәҰеӣҫеғҸе’ҢеҪ©иүІеӣҫеғҸпјҢ并еңЁVisual Studio 2008зҺҜеўғдёӢиҝӣиЎҢжҳҫзӨәгҖӮиҝҷдёӘйЎ№зӣ®еҸҜиғҪжҳҜдёҖдёӘеҹәдәҺC++жҲ–иҖ…C#зҡ„зј–зЁӢе®һзҺ°пјҢеӣ дёәVisual Studio...
зҪ‘дёҠжңүдёҚе°‘дҪҝз”ЁQtеҒҡз•ҢйқўпјҢOpenNIдёәеә“жқҘејҖеҸ‘kinectгҖӮжҲ–и®ёеӨ§е®¶зҡ„第дёҖдёӘй—®йўҳе°ұжҳҜиҜўй—®иҜҘжҖҺж ·дҪҝз”ЁKinectжқҘиҺ·еҸ–йўңиүІдҝЎжҒҜеӣҫе’Ңж·ұеәҰдҝЎжҒҜеӣҫе‘ўпјҹиҝҷдёҖиҠӮе°ұжҳҜз®ҖеҚ•жқҘеӣһзӯ”иҝҷдёӘй—®йўҳзҡ„гҖӮ дҪҝз”ЁOpenNIиҜ»еҸ–йўңиүІеӣҫе’Ңж·ұеәҰеӣҫзҡ„жӯҘйӘӨеҰӮдёӢпјҲиҝҷ...
еңЁжң¬ж–ҮдёӯпјҢжҲ‘们е°Ҷж·ұе…ҘжҺўи®ЁеҰӮдҪ•е°ҶKinect v1.8дј ж„ҹеҷЁиҺ·еҸ–зҡ„еҪ©иүІеӣҫеғҸдёҺж·ұеәҰеӣҫеғҸиҝӣиЎҢеҜ№йҪҗпјҢ并еңЁOpenCVеә“зҡ„её®еҠ©дёӢжҳҫзӨәе®ғ们зҡ„з»“жһңгҖӮиҝҷдёӘиҝҮзЁӢз§°дёәеҪ©иүІ-ж·ұеәҰй…ҚеҮҶпјҢеҜ№дәҺзҗҶи§Је’ҢеӨ„зҗҶжқҘиҮӘKinectзҡ„ж•°жҚ®иҮіе…ійҮҚиҰҒгҖӮ йҰ–е…ҲпјҢи®©жҲ‘们...
4. **жҳҫзӨәз»“жһң**пјҡеңЁеҗҢдёҖдёӘзӘ—еҸЈдёӯпјҢеҗҢж—¶жҳҫзӨәж·ұеәҰеӣҫеғҸе’ҢеҜ№еә”зҡ„еҪ©иүІеӣҫеғҸпјҢз”Ёйј ж ҮйҖүеҸ–ж·ұеәҰеӣҫеғҸзҡ„зӮ№пјҢе®һж—¶жҳҫзӨәе…¶еңЁеҪ©иүІеӣҫеғҸдёҠзҡ„дҪҚзҪ®д»ҘеҸҠеҜ№еә”зҡ„ж·ұеәҰеҖјгҖӮ е®һзҺ°иҝҷдёӘйЎ№зӣ®йҖҡеёёдјҡдҪҝз”Ёзј–зЁӢиҜӯиЁҖеҰӮC++жҲ–PythonпјҢз»“еҗҲKinectзҡ„е®ҳж–№...
"дҪҝз”ЁOpenNIиҜ»еҸ–еӨҡдёӘKinect" ...дҪҝз”ЁOpenNIиҜ»еҸ–еӨҡдёӘKinectж•°жҚ®еҸҜд»ҘдҪҝз”ЁOpenNIеә“жқҘи®ҝй—®е’ҢеӨ„зҗҶKinectи®ҫеӨҮзҡ„ж•°жҚ®пјҢ并дҪҝз”ЁOpenCVеә“жқҘеӨ„зҗҶе’ҢжҳҫзӨәж·ұеәҰж•°жҚ®гҖӮйҖҡиҝҮиҝҷз§Қж–№ејҸпјҢжҲ‘们еҸҜд»Ҙе®һзҺ°еӨҡдёӘKinectи®ҫеӨҮзҡ„еҗҢж—¶иҜ»еҸ–е’ҢеӨ„зҗҶгҖӮ
Kinect V2жҳҜдёҖж¬ҫе…Ҳиҝӣзҡ„дј ж„ҹеҷЁи®ҫеӨҮпјҢе®ғиғҪеӨҹжҚ•иҺ·й«ҳиҙЁйҮҸзҡ„еҪ©иүІеӣҫеғҸгҖҒж·ұеәҰеӣҫеғҸд»ҘеҸҠзәўеӨ–еӣҫеғҸгҖӮеңЁеӨ„зҗҶиҝҷдәӣж•°жҚ®ж—¶пјҢдёҖдёӘеёёи§Ғзҡ„д»»еҠЎжҳҜиҝӣиЎҢеҪ©иүІж·ұеәҰй…ҚеҮҶпјҢеҚіе°Ҷж·ұеәҰеӣҫеғҸдёҺеҪ©иүІеӣҫеғҸеҜ№еә”иө·жқҘпјҢд»ҘдҫҝжӣҙеҘҪең°зҗҶи§ЈеңәжҷҜзҡ„дёүз»ҙз»“жһ„гҖӮеңЁ...
ж Үйўҳ"KinectйҮҮйӣҶж·ұеәҰе’ҢеҪ©иүІеӣҫеғҸ并еҗҢж—¶дҝқеӯҳ"ж¶үеҸҠзҡ„жҳҜдҪҝз”ЁKinectи®ҫеӨҮеҗҢж—¶иҺ·еҸ–е…¶ж·ұеәҰеӣҫеғҸе’ҢеҪ©иүІеӣҫеғҸпјҢ并иҝӣиЎҢе®һж—¶дҝқеӯҳзҡ„жҠҖжңҜгҖӮж·ұеәҰеӣҫеғҸи®°еҪ•дәҶеңәжҷҜдёӯжҜҸдёӘеғҸзҙ зӮ№дёҺKinectдј ж„ҹеҷЁзҡ„и·қзҰ»дҝЎжҒҜпјҢиҖҢеҪ©иүІеӣҫеғҸеҲҷжҸҗдҫӣдәҶдёҖдёӘRGBиүІеҪ©...
ејҖеҸ‘иҖ…йңҖиҰҒзј–еҶҷд»Јз ҒжқҘеӨ„зҗҶKinectзҡ„ж•°жҚ®жөҒпјҢи§Јжһҗ并жҳҫзӨәж·ұеәҰе’ҢеҪ©иүІеӣҫеғҸпјҢеҗҢж—¶е®һзҺ°йј ж ҮдәӢ件зӣ‘еҗ¬д»ҘиҺ·еҸ–еғҸзҙ зӮ№гҖӮ 7. **еә”з”ЁйўҶеҹҹ**пјҡиҝҷдёӘеҠҹиғҪеңЁеӨҡдёӘйўҶеҹҹйғҪжңүеә”з”ЁпјҢжҜ”еҰӮиҷҡжӢҹзҺ°е®һгҖҒеўһејәзҺ°е®һгҖҒдәәдҪ“еҠЁдҪңиҜҶеҲ«гҖҒе®ӨеҶ…зҺҜеўғйҮҚе»әзӯү...
ж ҮйўҳвҖңkinectиҺ·еҸ–ж·ұеәҰе’ҢеҪ©иүІж•°жҚ®е№¶дҝқеӯҳвҖқжҢҮзҡ„жҳҜеҲ©з”Ёеҫ®иҪҜзҡ„Kinectи®ҫеӨҮпјҢйҖҡиҝҮзј–зЁӢж–№ејҸиҺ·еҸ–е…¶иҫ“еҮәзҡ„ж·ұеәҰеӣҫеғҸе’ҢеҪ©иүІеӣҫеғҸж•°жҚ®пјҢ并е°Ҷе…¶дҝқеӯҳеҲ°жң¬ең°ж–Ү件дёӯгҖӮиҝҷйҖҡеёёж¶үеҸҠеҲ°и®Ўз®—жңәи§Ҷи§үгҖҒдј ж„ҹеҷЁжҠҖжңҜд»ҘеҸҠеӣҫеғҸеӨ„зҗҶзӯүйўҶеҹҹгҖӮ Kinect...
OpenGLгҖҒOpenCVдёҺOpenNIжҳҜи®Ўз®—жңәи§Ҷи§үйўҶеҹҹ...жҖ»д№ӢпјҢз»“еҗҲOpenGLгҖҒOpenCVе’ҢOpenNIпјҢжҲ‘们еҸҜд»Ҙе®һзҺ°дёҺKinectзӣёжңәзҡ„дәӨдә’пјҢиҜ»еҸ–е…¶ж•°жҚ®е№¶иҝӣиЎҢе®һж—¶еӨ„зҗҶе’ҢжҳҫзӨәгҖӮиҝҷдёәејҖеҸ‘ж¶үеҸҠдәәжңәдәӨдә’гҖҒжңәеҷЁдәәеҜјиҲӘгҖҒдёүз»ҙйҮҚе»әзӯүйўҶеҹҹеә”з”ЁжҸҗдҫӣдәҶеҹәзЎҖгҖӮ
1. **ж•°жҚ®иҺ·еҸ–**пјҡйҰ–е…ҲпјҢжҲ‘们йңҖиҰҒиҝһжҺҘеҲ°Kinectи®ҫеӨҮпјҢ并йҖҡиҝҮOpenNIеә“иҜ»еҸ–е…¶иҫ“еҮәзҡ„ж·ұеәҰеӣҫеғҸгҖӮKinectдҪҝз”ЁзәўеӨ–жҠ•еҪұе’Ңдј ж„ҹеҷЁжқҘи®Ўз®—еңәжҷҜдёӯжҜҸдёӘеғҸзҙ зҡ„и·қзҰ»пјҢеҪўжҲҗж·ұеәҰеӣҫгҖӮ 2. **еқҗж ҮиҪ¬жҚў**пјҡж·ұеәҰеӣҫеғҸзҡ„жҜҸдёӘеғҸзҙ йғҪеҢ…еҗ«дёҖдёӘ...
Kinect V2жҳҜдёҖж¬ҫз”ұеҫ®иҪҜејҖеҸ‘зҡ„дҪ“ж„ҹи®ҫеӨҮпјҢдё»иҰҒз”ЁдәҺжҚ•жҚүдәәдҪ“еҠЁдҪңгҖҒж·ұеәҰдҝЎжҒҜд»ҘеҸҠиүІеҪ©дҝЎжҒҜгҖӮеңЁзј–зЁӢйўҶеҹҹпјҢејҖеҸ‘иҖ…еҸҜд»ҘйҖҡиҝҮSDKжқҘи®ҝй—®иҝҷдәӣж•°жҚ®пјҢе®һзҺ°еҗ„з§Қжңүи¶Јзҡ„еә”з”ЁпјҢеҰӮиҷҡжӢҹзҺ°е®һгҖҒдҪ“ж„ҹжёёжҲҸгҖҒдәәжңәдәӨдә’зӯүгҖӮжң¬ж–Үе°ҶиҜҰз»Ҷд»Ӣз»ҚеҰӮдҪ•...
1. **openNIжЎҶжһ¶**пјҡopenNIжҸҗдҫӣдәҶз»ҹдёҖзҡ„APIпјҢдҪҝеҫ—ејҖеҸ‘иҖ…еҸҜд»ҘиҪ»жқҫең°и®ҝй—®е’ҢеӨ„зҗҶжқҘиҮӘKinectзҡ„еҺҹе§Ӣж•°жҚ®пјҢеҰӮRGBеӣҫеғҸгҖҒж·ұеәҰеӣҫе’ҢйӘЁжһ¶дҝЎжҒҜгҖӮ 2. **Kinectдј ж„ҹеҷЁ**пјҡKinectиғҪжҚ•жҚүеҲ°3Dз©әй—ҙдёӯзҡ„ж·ұеәҰдҝЎжҒҜпјҢйҖҡиҝҮз®—жі•и®Ўз®—еҮәдәәдҪ“зҡ„...
ж Үйўҳдёӯзҡ„вҖңkinect SDK еҪ©иүІеӣҫеғҸиҜ»еҸ–вҖқжҳҜжҢҮеҲ©з”Ёеҫ®иҪҜзҡ„KinectејҖеҸ‘е·Ҙе…·еҢ…пјҲSDKпјүжқҘиҺ·еҸ–е’ҢеӨ„зҗҶжқҘиҮӘKinectдј ж„ҹеҷЁзҡ„еҪ©иүІеӣҫеғҸж•°жҚ®гҖӮKinectжҳҜдёҖж¬ҫйқ©е‘ҪжҖ§зҡ„дҪ“ж„ҹи®ҫеӨҮпјҢе®ғиғҪжҚ•иҺ·еҲ°з”ЁжҲ·зҡ„дёүз»ҙз©әй—ҙдҝЎжҒҜпјҢеҢ…жӢ¬ж·ұеәҰгҖҒйўңиүІе’ҢйӘЁйӘји·ҹиёӘ...