
前言
从互联网+的概念一出来,就瞬间吸引了各行各业的能人志士,想要在这个领域分上一杯羹。现在传统工业生产行业运用互联网+的概念偏多,但是在大众创业万众创新的背景下,“互联网+”涌出了层出不穷的“玩法”,智慧城市、隧道交通、智慧园区、工业生产,甚至是这次要说的智能飞机!异地协同制造的范围,目前多局限于主机制造厂之间,发动机和机载系统介入得很少。“互联网+飞机”可通过提高各类飞行器的有效监控能力、应急处置能力来大幅提高航行安全水平。“在提高这两大能力后,像飞机失联这类事件将不再发生。”当飞机飞离预定航线时,地面可以即时监控,甚至在飞机遭遇恶意操控时,地面也可以接管,而且“互联网+飞机”将对每架飞机的各项数据了如指掌,有效提高航行的安全。我认为,“互联网+飞机”将超出传统的“互联网+飞机制造”阶段,让互联网在飞机全寿命使用过程中发威,这可为传统制造业转型升级提供重大机遇。
http://hightopo.com/guide/guide/plugin/obj/examples/example_path.html
代码部分
加载飞机模型
首先,最重要的是我们的飞机模型,前面有文章写到过,HT 内部封装了一个方法 ht.Default.loadObj (https://hightopo.com/guide/guide/plugin/obj/ht-obj-guide.html#ref_loadobj)来加载 OBJ 文件:
ht.Default.loadObj('obj/plane.obj', 'obj/plane.mtl', {
center: true,
r3: [0, -Math.PI/2, 0], // make plane face right
s3: [0.15, 0.15, 0.15], // make plane smaller
finishFunc: function(modelMap, array, rawS3){
if(modelMap){
modelMap.propeller.r3 = {// propeller 螺旋桨
func: function(data){
return [data.a('angle'), 0, 0];
}
};
// 设置模型的大小为原来的 1 1.2 1.2 倍(相当于 x 轴放大了 1 倍,y 轴放大了 1.2 倍,z 轴放大了 1.2 倍)
modelMap.propeller.s3 = [1, 1.2, 1.2];
modelMap.propeller.color = 'yellow';
}
});
要将 obj 解析后的模型信息绑定到图元,需先调用建模手册(https://hightopo.com/guide/guide/plugin/modeling/ht-modeling-guide.html)中模型注册(https://hightopo.com/guide/guide/plugin/modeling/ht-modeling-guide.html#ref_register)章节介绍的 ht.Default.setShape3dModel(name, model) 函数进行注册,之后图元只需将 style 的 shape3d 属性设置为注册的名称。当然我们现在将这个方法封装了一下,采用更简便的方法来加载模型,但是还是需要加载的原理:
// models/plane.json
{
"modelType": "obj",
"obj": "obj/plane.obj",
"mtl": "obj/plane.mtl"// 要是没有 mtl 文件,则设置为 ""
}
之后通过设置节点的 style 的 shape3d 属性设置为这个 json:node.s('shape3d', 'models/plane.json')。
注意!不管使用哪种方法来加载模型,mtl 文件中如果有使用贴图,贴图的路径需要是相对于 obj 文件的路径。
前面代码中的 modelMap.propeller 是 OBJ 文件中定义好的 modelMap 对象中的 propeller 对象,可以试着打印 modelMap 看看输出结果。

加载机尾指示灯
这个方法里的 finishFunc(modelMap, array, rawS3) 用于加载后的回调处理,具体查阅 HT for Web OBJ 手册(http://hightopo.com/guide/guide/plugin/obj/ht-obj-guide.html#ref_loadobj),我们还添加了一个在 OBJ 模型中没有的飞机尾部的“红色闪烁指示灯”,这里用到的是组合模型 array(所有材质组成的数组,里面有至少一个模型),我们在 array中加入一个新的球模型:
// 添加一个指示灯的圆形模型
array.push({
shape3d: ht.Default.createSmoothSphereModel(),
t3: [-40, 10, 0],
s3: [6, 6, 6],
color: {
func: function(data){
return data.a('light') ? 'red': 'black';
}
}
});
这里的 shape3d 是 HT 封装的一个属性名,通过 setShape3dModel(name, model) 函数注册的或者是通过 getShape3dModel(name) 函数返回的注册过的 3D 模型,如何注册 3D 模型可查阅 HT for Web 建模手册(http://hightopo.com/guide/guide/plugin/modeling/ht-modeling-guide.html#ref_register)。
color 属性名对应了一个对象,这边的定义是这样的,color 直接通过 data.getAttr('a') 获取 data.setAttr(‘a’, value) 中的值,这样做有两个好处,一是可以不污染 HT 的常用属性操作,所以 HT 专门定义了这个 attr 属性类型,是 HT 预留给用户存储业务数据的;二是这样也很方便数据绑定,我们可以通过在需要更改属性的地方调用 setAttr 方法,非常方便。
接着我们通过 ht.Default.setShape3dModel(name, model) 来将我们刚刚组合好的模型 array 注册成我们要的“plane”模型:
ht.Default.setShape3dModel('plane', array);
创建模型节点
注册好模型后肯定是要调用这个模型,我们可以通过 shape3d 属性来调用这个模型,并且在这个模型中自定义上面代码中出现过的 light 属性和 angle 属性:
plane = new ht.Node();
plane.s3(200, 200, 200);
plane.s3(rawS3);
plane.s({
'shape3d': 'plane',
'shape3d.scaleable': false,
'wf.visible': true,// 线框是否可见
'wf.color': 'white',
'wf.short': true // 是否显示封闭的线框,true为不封闭的短线框
});
plane.a({
'angle': 0,
'light': false
});
动画
因为飞机还有螺旋桨、指示灯两个功能,我们还得对这两个模型做动画效果,可查阅 HT for Web 动画手册(http://hightopo.com/guide/guide/plugin/animation/ht-animation-guide.html),通过用户在 form 表单上选择的结果来决定飞机飞行持续时间、看飞机的视角、飞机沿着“航线”飞行所要旋转的角度、机尾指示灯的“闪烁”功能等等,最后别忘了飞机停止飞行时,如果要让飞机继续飞行,就得回调这个动画,并且设置灯不再闪烁,别忘了要启动动画:
params = {
delay: 1500,
duration: 20000,
easing: function(t){
return (t *= 2) < 1 ? 0.5 * t * t : 0.5 * (1 - (--t) * (t - 2));
},
action: function(v, t){
var length = g3d.getLineLength(polyline),
offset = g3d.getLineOffset(polyline, length*v),
point = offset.point,
px = point.x,
py = point.y,
pz = point.z,
tangent = offset.tangent,
tx = tangent.x,
ty = tangent.y,
tz = tangent.z;
plane.p3(px, py, pz);
plane.lookAt([px + tx, py + ty, pz + tz], 'right');
var camera = formPane.v('Camera');
if(camera === 'Look At'){
g3d.setCenter(px, py, pz);
}
else if(camera === 'First Person'){
g3d.setEye(px - tx * 400, py - ty * 400 + 30, pz - tz * 400);
g3d.setCenter(px, py, pz);
}
plane.a('angle', v*Math.PI*120);
if(this.duration * t % 1000 > 500){
plane.a('light', false);
}else{
plane.a('light', true);
}
},
finishFunc: function(){
animation = ht.Default.startAnim(params);
plane.a('light', false);
}
};
animation = ht.Default.startAnim(params);
其实最让我们好奇的是描绘的路径跟飞机本身的飞行并没有关系,还有那么多左拐右拐的,要如何做才能做到呢?
绘制飞机轨道
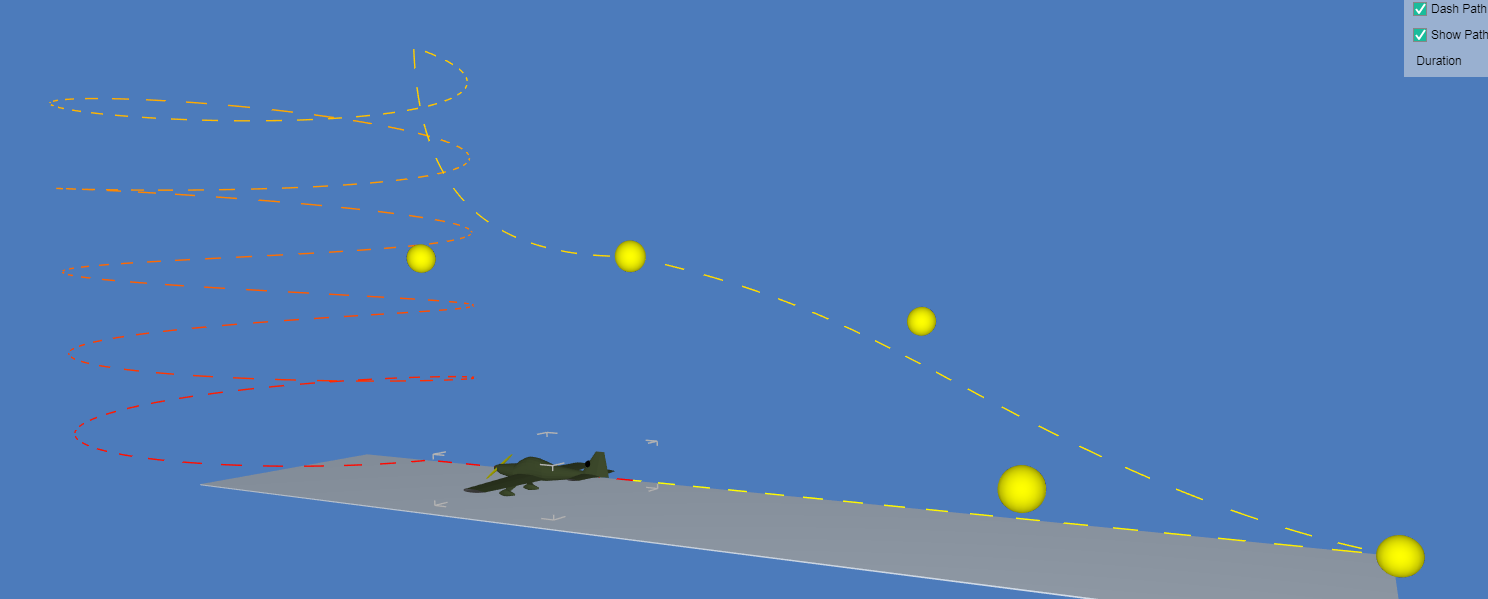
接下来我们来描绘路径,首先这个路径是由 ht.Polyline 作为基础来描绘的:
polyline = new ht.Polyline();
polyline.setThickness(2);
polyline.s({
'shape.border.pattern': [16, 16],
'shape.border.color': 'red',
'shape.border.gradient.color': 'yellow',
'shape3d.resolution': 300,
'3d.selectable': false
});
dataModel.add(polyline);
上面的代码只是向 datamodel 数据模型中添加了一个 polyline 管线而已,不会显示任何东西,要显示“航道”首先就要设置航道所在的点,我们先设置航道的初始点:
points = [{ x: 0, y: 0, e: 0 }];
segments = [1];
这个 points 和 segments 是 HT for Web Shape 手册(http://hightopo.com/guide/guide/core/shape/ht-shape-guide.html)中定义的,points 是 ht.List 类型数组的定点信息,顶点为 { x: 100, y: 200 } 格式的对象;segments 是 ht.List 类型的线段数组信息,代表 points 数组中的顶点按数组顺序的连接方式。
图中“航道”左侧的多个圆形轨道也是通过设置 points 和 segments 来设置的:
for(var k=0; k<count+1; k++){
var angle = k * Math.PI * 2 * round / count;
points.push({
x: cx + radius * Math.cos(angle),
y: cy + radius * Math.sin(angle),
e: k * height / count
});
segments.push(2);
}
接下来几个拐点也是这种方法来实现的,这里就不赘述了,如果你还没看手册的话,这里标明一点,segments 只能取值 1~5,1 代表一个新路径的起点;2 代表从上次最后点连接到该点;3 占用两个点信息,第一个点作为曲线控制点,第二个点作为曲线结束点;4 占用3个点信息,第一和第二个点作为曲线控制点,第三个点作为曲线结束点;5 不占用点信息,代表本次绘制路径结束,并闭合到路径的起始点:
points.push({ x: cx+radius, y: 0, e: height/2 });
points.push({ x: 0, y: 0, e: height/2 });
segments.push(3);
points.push({ x: radius, y: -radius, e: height/2*0.7 });
points.push({ x: radius*2, y: radius, e: height/2*0.3 });
points.push({ x: radius*3, y: 0, e: 0 });
segments.push(4);
points.push({ x: 0, y: 0, e: 0 });
segments.push(2);
我们已经把路径上的点都添加进“航道”中了,接下来要把点都设置到管道上去才会显示在界面上:
polyline.setPoints(points); polyline.setSegments(segments);
飞机跑道

“跑道”就比较简单了,只是一个 Node 节点然后设置基础效果而已,没什么特别的:
runway = new ht.Node();
runway.s3(-cx+radius*3, 1, 200);
runway.p3(cx+runway.getWidth()/2, -22, 0);
runway.s({
'all.color': '#FAFAFA',
'all.transparent': true,
'all.reverse.cull': true,
'all.opacity': 0.8,
'3d.selectable': false
});
dataModel.add(runway);
最后,在界面上添加一个 formPane 表单面板,定义好之后可以直接添加到 body 上,这样就不会跟 graph3dView 有显示的联系了。
表单面板

formPane 可以用 formPane.addRow(https://hightopo.com/guide/guide/plugin/form/ht-form-guide.html#ref_func)方法动态添加行,这个方法中可以直接对动态变化的数据进行交互,例如本例中的是否有动画 Animation,我们利用 checkBox 来记录选中或者非选中的状态:
{
checkBox: {
label: 'Animation',
selected: true,
onValueChanged: function(){
if(this.isSelected()){
animation.resume();
}else{
animation.pause();
}
}
}
}
也可以通过设置“id”来记录动态改变的值,然后 formPane 就会通过调用 formPane.v(id) 来获取当前值。
最后
工业互联网(Industrial Internet)的概念最早由通用电气(GE)在 2012 年提出,即让互联网进入产业链的上游,从根本上革新产业。根据飞常准的数据显示,美国已有 78% 的航班提供机上互联服务。在航天航空领域,工业互联网会打破软件、硬件和人员之间的信息壁垒,依靠大数据的分析,让飞机建立自己的声音,表达给飞行员和维修人员飞行员,具体飞行状况如何或者哪里需要维修。工业互联网技术的深入应用,正在改变着民航飞机的使用效率和制造成本。

https://hightopo.com/demo/large-screen/index.html

https://hightopo.com/demo/cloud-monitor/demo4.html

https://hightopo.com/demo/HTBuilding/index.html






相关推荐
本文探讨了基于互联网技术的PLC工业控制智能监控系统的研究,其核心在于将新一代信息技术应用于传统的工业控制,以实现智能化的生产管理和监控。文中介绍了智能监控系统的架构、功能以及实现方式,并强调了物联网、...
综上所述,能源(石化)行业工业互联网智能工厂解决方案致力于打造透明工厂,通过集成的工业互联网技术,实现智慧制造。这一解决方案旨在提高资源利用效率,提升产品质量,满足个性化需求,同时通过智能决策和自动化...
基于工业互联网的智慧电厂智慧管控系统-CPEM2021年电力人工智能大会.pdf 本文档介绍了基于工业互联网的智慧电厂智慧管控系统,旨在提高电厂的智能化和自动化水平,提高生产效率和降低成本。该系统通过工业互联网...
"基于移动互联网的智能车载APP.pdf" 本文阐述了基于移动互联网的智能车载APP的设计与实现。该系统结合了移动互联网技术和OBD车载诊断系统,旨在提供智能的车载诊断服务。通过移动用户端与车载终端的结合,实现了...
综上所述,基于工业互联网操作系统的数据采集方法与流程,通过边缘计算、数据加密、网络传输及云端处理等技术手段,构建起了一套完整的工业数据采集与处理体系,极大地提升了工业互联网的数据处理能力和业务应用水平...
2020年工业互联网大会PPT汇总(92份)。 发挥工业互联网平台赋能使命 助力国家新基建融通创新 钢铁行业工业互联网解决方案与应用场景 工业互联网的网络技术 助力东盟国家中小企业赋能 5G+工业互联网- 5G赋能,智联...
4. 应用层:基于平台层提供的服务,开发各种面向特定业务场景的应用,如预测性维护、智能排产、质量控制等。 在智能制造中,工业互联网平台的作用体现在以下几个方面: 1. 数据驱动决策:通过收集和分析大量生产...
基于Arduino的智能家居控制系统结合了物联网技术与开源硬件的优势,为家庭自动化提供了经济实惠且高效的解决方案。随着物联网技术的进一步发展,此类系统将更深入地融入日常生活,提升生活质量,为人们创造更为智能...
《基于工业互联网的智慧矿山解决方案》是一份详细探讨如何运用现代信息技术改造传统矿业的文档,旨在构建新一代的智慧矿山系统。这份解决方案的核心是工业互联网,它将互联网与新一代信息技术与工业系统深度融合,...
基于HTML开发的飞机大战游戏,解压即可运行,利用鼠标控制飞行运行。基于HTML开发的飞机大战游戏,解压即可运行,利用鼠标控制飞行运行。基于HTML开发的飞机大战游戏,解压即可运行,利用鼠标控制飞行运行。基于HTML...
《基于工业互联网平台的流程行业新一代智能工厂解决方案》 随着科技的进步和数字化转型的加速,工业互联网平台已成为推动流程行业新一代智能工厂发展的关键力量。新一代智能工厂旨在实现生产过程的安全、绿色、节能...
基于工业互联网的煤矿智能一体化管控平台是当前煤炭行业向智能化转型的重要载体。该平台旨在通过整合数据标准、智能管控体系,实现对煤矿人、机、环各子系统的综合集成,从而提升安全生产水平和煤炭供应稳定性。本文...
- **用户交互模块**:通过手机APP或触摸屏等人机界面,让用户能够直观地查看和控制智能家居系统。 #### 五、系统优势与应用场景 该智能家居控制系统具有以下特点: - **模块化设计**:可以根据不同家庭的实际需求...
基于PID控制器的强大功能和在工业控制中的优势,我们重新设计了一个PID控制器,以优化系统的性能指标。 四、仿真结果分析 仿真结果表明,引入前置滤波器可以明显改善系统的动态性能。同时,重新设计的PID控制器也...
家电行业工业工业互联网智能工厂解决方案.pptx 工业互联网与智能制造.pptx 工业互联网助力企业数字化转型.pptx 工业互联网助力智能油气管道建设.pptx 工业互联网平台技术及常见应用场景.pptx 工业互联网平台技术及...
综上所述,基于工业互联网和多传感器数据的电机故障诊断方法,通过实时监测电机的关键参数,结合先进的数据分析技术,能够有效地提前发现电机潜在的故障问题,为实现智能制造和工业4.0提供了有力的技术支持。...
本篇论文主要探讨了基于云服务的智能控制器设计,特别以泡茶机为研究对象,介绍了智能化控制技术在家居领域中的应用。以下是对该文献的详细知识点介绍。 知识点一:智能家居技术的发展与趋势 智能家居的概念自上...
基于工业互联网的热电智能调控技术.docx
智能控制是现代控制理论的一个重要分支,它结合了人工智能、模糊逻辑、神经网络、遗传算法等技术,以解决复杂、非线性、不确定系统的问题。MATLAB作为一种强大的数学计算和编程环境,是实现智能控制算法的理想平台。...