
(本文包括章节:1、由来,2、算法简单回顾,3、演习道具,4、演习,5、算法提出者Leslie的八卦。hoho)
1、由来:
刘备接受了诸葛亮的提议,决定将paxos算法的思想应用到蜀帝国的决策机制上。然而,玄德生性谨慎,决定先行试点,实践下可行性。孔明提议,由蜀国五大肌肉男:关羽、张飞、赵云、马超、黄忠,做为决策者,而廖化、周仓、魏延分别无序的提出关于同一件事的水火不容的三个提案,孔明坚信:即使脑残者使用了paxos算法,也不会出现冲突的政令不一情况。paxos算法理论以及刘备是怎么被孔明忽悠的部分,同学们可以参考上篇《paxos分布式一致性算法--讲述诸葛亮的反穿越》:http://blog.csdn.net/russell_tao/article/details/7244530
闲话少叙,书接上文。
为了少打点字,刘备与诸葛亮俩玻璃不再以对话形式出现了。他们设置了五个官署(五虎将办公地,相当于Server),三个提案点(周仓等三人,发起提案时的办公地。相当于Client),当然都不在一起,信使们从提案点到官署传递信息的话,正常情况下需要半个小时,也就是30分钟。这次演习,哥俩不关注学习情况,所以paxos第三段就不在演习内容里了。诸葛亮为廖化、周他、魏延对于事件e准备了三个自相矛盾的提案,我们分别用p1、p2和p3代替吧。先行说明提案:
事件e(也就是本次paxos实例):蜀国今后的发展路线
提案p1:学习红色锤子镰刀,走激进主义,一切发展按照计划进行,小民们凭票消费,银子多了也没用,集中力量办大事,崇尚国家垄断主义。
提案p2:学习自由联盟,走自由主义,宁失去效率也不失去公正,发展民营经济为先,民主、法制、新闻自由,通过这种公正来激发社会的整体创造力。
提案p3:坚持孔孟之道,走保守主义,兼顾黄老之学,坚信中学为体、西学为用,国体不可大改,走有大汉国情的老路让别人说去吧。
2、算法简单回顾
我们再简单回顾下提案者和作为决策者的五虎将行动准则,共有六步,书记官(暂让五虎将兼职)负责记录下通过的提案p(通过了就叫法令了),这样,我们用1a,1b,2a,2b,3a,3c来表述全部的六步。(这六步就是三段式提交了,这在上篇《paxos分布式一致性算法--讲述诸葛亮的反穿越》里讲过,不再复述。)
魏延、廖化、周仓:
1a,作为提案者,首先向刘备要到个编号,搞清楚自己对事件e的态度。记录下当前时间,接下来向五虎将的多数派(3个或以上)发送事件+编号。
2a,此时开始处理五虎将的回应,这就有多种情况了。收到明确拒绝就得放弃!检查沙漏,如果到达时间限制了,还没有足够的多数派回应,那么就试着给五虎将的其他人再发送提案看看。如果收到了足够的五虎将里多数派的回应,那么,确定在2a这步里,如果要提案,到底提哪个提议?是自己现在要提的提案?
3a,提案者如果收到足够的五虎将多数派回应通过,则记录提案为通过的政策法令,同时通知所有书记官,也就是兼职的五虎将,把法令记录到羊皮纸上来。
五虎将:
1b,作为决策者,也需要沙漏,主要用于2b步骤后批准政策法令后,给自己设定个超时时间,若第三步信使没有过来,则超时后自动把提案变成政策法令记录到羊皮纸上。1b这个步骤是收到了信使的消息,来自于1a步骤里的提案者。收到事件e和编号N。五虎将这时将有可能出现三个动作:拒绝、通过以及第三个复杂点的动作,虽然通过但告诉魏延廖化,哥曾经批准过某提案了。(三种条件的达成请参考上篇文章《paxos分布式一致性算法--讲述诸葛亮的反穿越》)
2b,与1b步骤相同,唯一不一样的是,如果决定批准某个提案,必须先把该提案和编号记录到羊皮纸的背面。(羊皮纸的详细用途参见演习前提)
3b,记录法案到羊皮纸的正面上。(本步骤不在下面演习中出现)
3、演习道具
先解释下我们用到的道具吧。
羊皮纸(相当于硬盘):其正面记录真正通过的法令,背面相当于永久有效的草纸,背面记录一个三元组(S,V,Sh),S表示上次批准的提案编号,V表示上次批准的提案,Sh表示处理过的最大提案编号。(羊皮纸丢掉后的效果在演习结束后说明)
草纸:与羊皮纸背面相同,记录三元组。唯一不同的是,草纸容易丢失。
沙漏:记录时间。我们简单的认为,任何两个地方一次通讯时间为30分钟。所以,如果我们从提案者那出发,信使到五虎将再回来,我们认为一个小时足矣(忽略五虎将或者提案者的处理时间)。
下面的演习中,只有消息的丢失,实际上对于消息的重发和延迟,也不会有任何问题。只是对五虎将的缺席,需要做说明。如果五虎将的羊皮纸丢失,是不能直接再次加入进五人决策团的,必须学习到最新的状态。没丢羊皮纸,则可以随时加入进来。
书记官记录法令中的不一致情况这里不加讨论。
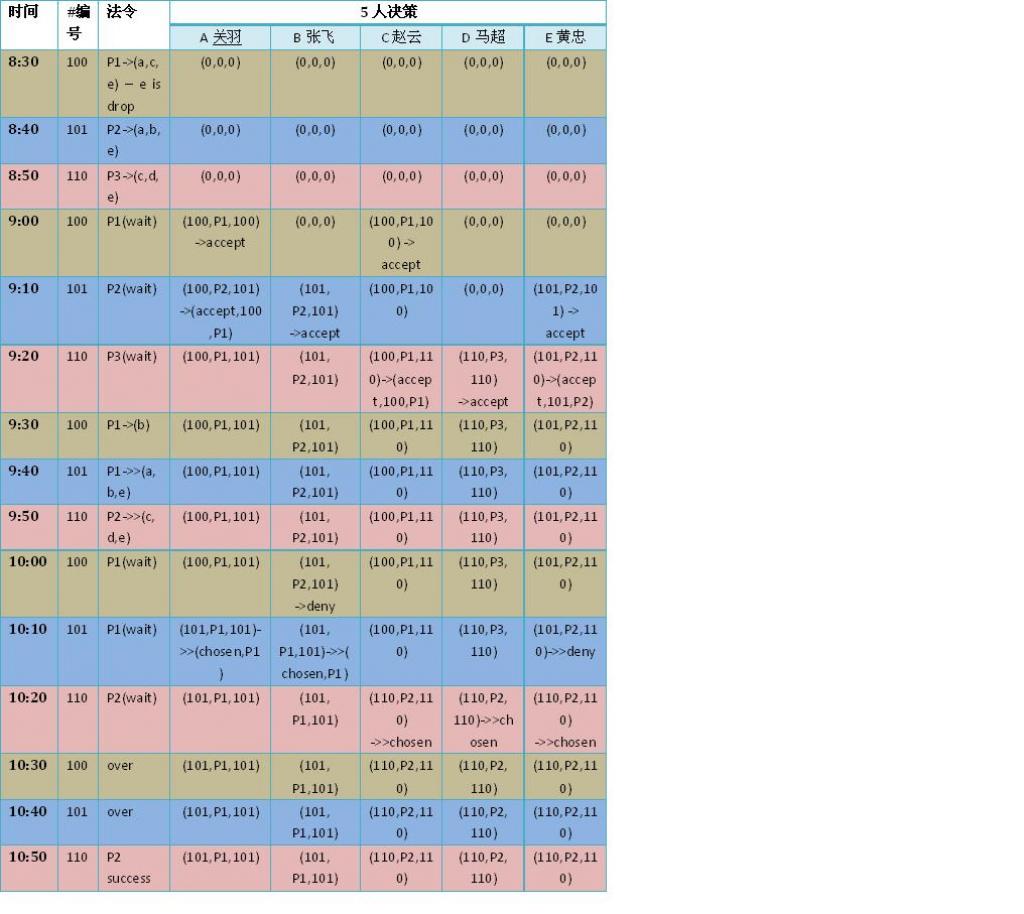
为了方便在图表中表示,我们先给五虎将五个字母编号:关羽a,张飞b,赵云c,马超d,黄忠e。
三种颜色表示不同的提案者:黄色表示廖化,蓝色表示周仓,红色表示魏延。
下面这幅图,表示不同的时间点,五虎将和三个提案者当时的状态。
->表示第一步预提案。包括1a和1b两步。
-->表示第二步提交提案,包括2a和2b。
五虎将记录的(s,v,sh)表示的三元组上面讲过了。法令项下面对应的是提案者魏、廖、周三人的状态。(wait)表示刚发出提案,1小时内等待返回呢。
e is drop表示发送给e黄忠的提案消息丢失了。
好了,可以往下看了。
4、演习
先放图,解释在下面。
详细说明上图:
8:30分上班了,红色周仓同学首先向关羽、赵云、黄忠三人发出了提案p1,编号为100,周仓开始等返回,预计9:30分时能收到三位的返回。我们假定,发给黄忠的信使出门就被孔明的跑车撞了。孔明闯祸后老实了,以下,不再出现信使失误事件了。
8:40分,崇尚民主的廖化同学向关羽、张飞、黄忠三人发出了编号为101的提案p2,预计9:40分收到返回的信使。
8:50分,喜欢孔孟的魏延同学向赵云、马超、黄忠三人发出了编号为110(魏延就是搞到大编号了啊)的提案p3,预计9:50收到返回的信使。
9:00整,周仓的提案p1到了关羽、赵云手里(黄忠没收到),两人无条件接受,记录(100,p1,100),承诺编号低于100的提案我可不会再处理了,然后两个信使开始返回。
9:10分,廖化编号为101的提案p2到了关羽、张飞、黄忠之手,张飞、黄忠哥俩从没收过事件e的提案,毫无疑问记为(101,p2,101),让信使回复接受。关羽则不然,红脸兄在10分钟前收到了周仓的编号为100的p1提案。所以,按规则办,关羽改自己的记录为(100,p1,101),让信使给廖化回复:你的编号101比较大,我同意你继续,不过我之前同意过一个编号为100的提案p1,请注意哦。
9:20分,魏延的p3提案到了赵云、马超、黄忠三人之手,马超第一次收到提案,记为(110,p3,110),回复批准。赵云和黄忠则不同,赵云收到过周仓的p1提案,这时要比提案编号了,魏延的110大于周仓的100,于是赵云记为(100,p1,110),告诉信使:我通过了,我承诺编号小于110的我不会处理,同时,我曾经批准过编号为100的提案p1。同理,黄忠记为(101,p2,110),也告诉信使:我曾经批准过编号为101的提案p2。
9:30分,周仓同学检测返回的信使了,关羽和赵云都返回批准,但是黄忠没有返回。因为必须N/2+1,也就是大多数人批准才行,所以,周仓向张飞发出提案p1。
9:40分,廖化收到了来自关羽、张飞、黄忠的回复,三人皆表示同意,但关羽表示:关某曾收到过编号100的p1提案。所以按照规则,廖化此时不能坚持自己原来的提案p2,而要改成关羽返回的提案p1,然后发起提交皆段,同样是让信使带给关羽、张飞、黄忠三人,我们用->>(a,b,e)表示。
9:50分,魏延收到了赵云、马超、黄忠三人在9:20分的答复,三人都同意了,但回答各不相同。马超没有多话,赵云说我曾收到过编号为100的p1提案,黄忠说我曾经收到过编号为101的p2提案。于是,魏延根据规则,不再提自己原来的p3提案,改为101编号对应的提案p2。接着,魏延开始向这三人发出提交请求,编号为110的提案p2。
10:00整,张飞收到了9:30分周仓补发的编号为100的提案p1,这之前,张飞在9:10分时曾经批准过来自廖化的提案p2,编号是101。所以,张飞在9:10时就已经承诺了,以后决不再处理编号小于101的提案。于是,张飞大吼一声:我拒绝。当然信使将会在10:30才能把消息带给周仓。
10:10分,关羽、张飞、黄忠收到了来自廖化于9:40分发出的(101,p1)提案,关羽和张飞都发现自己可以批准,记录到羊皮纸的背面,同时告诉信使:告诉廖化P1提案我批准了,我承诺编号小于101的提案不予理会。黄忠则不然,老将黄忠在9:20分时收到过魏延编号为110的提案,那时他批准了,意味着,所有小于110的提案他都会拒绝掉。这次廖化的提案才101,当然被拒绝掉了。三人的回复将于10:40会到达廖化处。
10:20分,魏延编号为110的P2提案到达赵云、马超、黄忠,三人没有疑问,毕竟110编号最大,都表示批准,并记录(110,p2,110)到各自的羊皮纸背面,回复信使通过。
10:30分,周仓收到了他在9:30分发给张飞的回复,张飞在10:00拒绝了,所以周仓这个提案就此作废。
10:40分,廖化收到了10:10来自关羽、张飞、黄忠的回复,关张二人批准,然而老黄忠明确表示拒绝,于是这次编号101的提案作废。
10:50分,魏延收到了赵云、马超、黄忠的回复,三人都表示批准,于是编号为110的提案p2最终作为法令记录下来(之后的3b学习过程略过),从此以后,蜀国的路线被确立为走民主路线,许多年后,蜀国统一了银河系。完。
以上任何步骤,大家可以任意制造难度,例如让同一个信使重复投递消息,或者延迟一天后消息到达某虎将处。或者让某个虎将正常如厕,而后正常归来。大家会发现,一致性是可以达到的,无论怎样,对于同一个事件e,互相冲突的三个法案:p1,p1,p3,一定只有一个可以达成。
对于任一虎将兄的挂掉,我们要分情况。如果是去大便,那么他的羊皮纸是不能丢的。大便完了,可以正常回到自己的官署办公。但是如果把羊皮纸丢了,那就不能立刻加入,必须向所有其他人学习,把失落的过程都学到,才能正常加入。这点至关重要,就是说,只要硬盘不坏,随时SERVER重启都能加入。硬盘一坏,对不起,学习完了才能继续办公。
5、后记---Leslie的八卦:
paxos算法是解决分布式服务数据一致性的终极算法,google的基础服务chubby(GFS的基础服务)的开发者说, “there is only one consensus(一致性) protocol, and that’s Paxos”。Microsoft有fast paxos论文,yahoo的zookeeper也用了paxos算法。可见,paxos是解决完全的分布式服务(无单点)间数据一致性的最好方法。但是paxos比较复杂,特别是网上的中文资料里少有能说得清楚的(主要是太多paxos变种算法了,掺合到一起搅得人头大),例如中文wiki上的paxos解释,光看这个是不可能搞懂paxos的。
paxos算法由Leslie Lamport在1990年提出,毫无疑问,paxos想解决的就是分布式环境下(server会挂掉,通讯协议不可靠,消息可能延迟、丢失、重发)如何保持数据一致性的问题。Leslie Lamport同学在1982年提出的“拜占庭将军”问题上尝到了甜头,这也是个分布式环境下的一致性问题,Leslie通过类比的方式,伪造了“拜占庭将军”历史,通过这种简单的类比成功的简化了复杂的分布式环境,效果非常好。于是在1990年Leslie同样用类比的方式提出了paxos算法,该问题跟“拜占庭将军”问题的区别是,“拜占庭将军”允许有叛徒,也就是允许伪造消息(默许被黑客攻击),而paxos则不允许消息被伪造。
Leslie很有幽默感的把论文写成一个考古发现,至始至终都在虚构他的“考古发现”。他说在考古中发现了失落的文明:希腊的paxos小岛。这里的议员通过邮递员传递消息,议会中一个议员提出法案,多数议员批准后法案获得通过。当然无论议员还是邮递员,都是兼职的,他们不可靠,随时可能走人,呵,典型的分布式环境,server可以挂,消息可以丢。Leslie根据考古文献反推出了paxos议会如何搞定法案一致性的问题。
发表论文时,Leslie一直用这种语气在写论文,于是《ACM Transactions on Computer Systems》编辑们认为太荒诞了,不能从头到尾虚构故事吧?毕竟是严谨的科学杂志,于是打回。Leslie同学身为牛人,坚持自己的看法,同时认为编辑们没有幽默感,拒绝修改。时间流逝,一晃九年过去,九年后有团队根据该论文开发出一个paxos实现,终于,编辑们低头了,允许发布Leslie的论文,但还是加了段编者著,在其中表示Leslie其实是个热爱计算机技术的考古学家!也算稍事解嘲。
写这两篇文章,我也试了下借喻的手段,用我们熟悉的三国人物,看看能否讲清楚paxos。其实paxos的算法本身算不得很复杂,但如果想讲清楚在各种异常情形下paxos算法的表现,给大家带来的明确的直观感受:paxos确实能解决一致性问题,这就不容易了。所以篇幅所限,只写了丢失一个消息的情况。不过大家如果从头看到这,应该可以简单的任意推导出其他异常吧?
最后,上面说的只是算法机制,如果需要了解现有的各种产品实现,最方便的还是看zookeeper源码,毕竟是开源的,例如去:http://zookeeper.apache.org/doc/r3.3.2/zookeeperOver.html,可以看下概述。淘宝开发团队有许多关于zookeeper实现的文章,到网上搜下就能看到。
对google的chubby实现,因为不是开源的,只有篇论文可以看:http://static.googleusercontent.com/external_content/untrusted_dlcp/research.google.com/zh-CN/us/archive/chubby-osdi06.pdf



相关推荐
内容概要:本文详细介绍了如何利用威纶通触摸屏及其配套软件EasyBuilder Pro构建一个水箱液位控制的PID仿真程序。主要内容涵盖触摸屏界面设计、PID算法实现、通信配置以及仿真模型搭建等方面。文中不仅提供了具体的代码示例,还分享了许多调试经验和优化技巧,如抗积分饱和处理、通信同步设置等。此外,作者还强调了实际应用中的注意事项,例如参数范围限制、突发情况模拟等。 适合人群:从事工业自动化领域的工程师和技术人员,尤其是对PID控制器有一定了解并希望深入掌握其实际应用的人群。 使用场景及目标:适用于需要进行水箱液位控制系统设计、调试和优化的工作环境。主要目标是帮助读者理解和掌握PID控制的基本原理及其在实际工程项目中的具体实现方法。 其他说明:附带完整的工程文件可供下载,便于读者快速上手实践。文中提到的所有代码片段均经过实际验证,确保可靠性和实用性。
内容概要:《2024年中国城市低空经济发展指数报告》由36氪研究院发布,指出低空经济作为新质生产力的代表,已成为中国经济新的增长点。报告从发展环境、资金投入、创新能力、基础支撑和发展成效五个维度构建了综合指数评价体系,评估了全国重点城市的低空经济发展状况。北京和深圳在总指数中名列前茅,分别以91.26和84.53的得分领先,展现出强大的资金投入、创新能力和基础支撑。低空经济主要涉及无人机、eVTOL(电动垂直起降飞行器)和直升机等产品,广泛应用于农业、物流、交通、应急救援等领域。政策支持、市场需求和技术进步共同推动了低空经济的快速发展,预计到2026年市场规模将突破万亿元。 适用人群:对低空经济发展感兴趣的政策制定者、投资者、企业和研究人员。 使用场景及目标:①了解低空经济的定义、分类和发展驱动力;②掌握低空经济的主要应用场景和市场规模预测;③评估各城市在低空经济发展中的表现和潜力;④为政策制定、投资决策和企业发展提供参考依据。 其他说明:报告强调了政策监管、产业生态建设和区域融合错位的重要性,提出了加强法律法规建设、人才储备和基础设施建设等建议。低空经济正加速向网络化、智能化、规模化和集聚化方向发展,各地应找准自身比较优势,实现差异化发展。
内容概要:本文详细介绍了多智能体协同编队控制的技术原理及其Python实现。首先通过生动形象的例子解释了编队控制的核心概念,如一致性算法、虚拟结构法、预测补偿等。接着深入探讨了编队形状的设计方法,包括如何利用虚拟结构法生成特定编队形状,并讨论了通信质量和参数调试的重要性。此外,还涉及了避障策略、动态权重分配以及故障检测等实际应用中的挑战和解决方案。最后,通过具体实例展示了如何将理论应用于实际项目中,如无人机编队表演、自动驾驶车队等。 适用人群:对多智能体系统、编队控制感兴趣的科研人员、工程师及高校师生。 使用场景及目标:适用于研究和开发多智能体协同编队控制系统的场景,旨在帮助读者理解并掌握相关技术和实现方法,提高系统的稳定性和可靠性。 其他说明:文中不仅提供了详细的代码示例,还分享了许多实践经验和技术细节,有助于读者更好地理解和应用这些技术。同时强调了参数调试、通信质量、预测补偿等方面的关键因素对于系统性能的影响。
内容概要:本文详细介绍了名为'MPC_ACC_2020-master'的四旋翼飞行器模型预测跟踪控制器(Matlab实现)。四旋翼飞行器由于其高度非线性和强耦合特性,在复杂环境中难以实现精准控制。模型预测控制(MPC)通过预测未来状态并在每一步进行在线优化,解决了这一难题。文中展示了关键代码片段,解释了系统参数定义、初始化、预测模型构建、成本函数构建、优化求解及控制输入的应用。此外,还探讨了MPC_ACC_2020-master如何通过精心设计的成本函数和优化算法确保四旋翼飞行器状态收敛到设定点。 适合人群:从事飞行器控制领域的研究人员和技术爱好者,尤其是对模型预测控制感兴趣的开发者。 使用场景及目标:适用于四旋翼飞行器的轨迹跟踪任务,旨在提高飞行器在复杂环境下的稳定性与准确性。具体应用场景包括但不限于无人机竞速、自动巡航、物流配送等。 其他说明:尽管该项目主要用于科研目的,但其简洁高效的代码结构也为实际工程应用提供了良好借鉴。同时,项目中存在一些待改进之处,如状态估计部分未考虑真实情况下的噪声干扰,后续版本计划移植到C++并集成进ROS系统。
内容概要:本文探讨了基于MATLAB2020b平台,采用CNN-LSTM模型结合人工大猩猩部队(GTO)算法进行电力负荷预测的方法。首先介绍了CNN-LSTM模型的基本结构及其在处理多变量输入(如历史负荷和气象数据)方面的优势。随后详细解释了如何通过GTO算法优化超参数选择,提高模型预测精度。文中展示了具体的MATLAB代码示例,包括数据预处理、网络层搭建、训练选项设定等方面的内容,并分享了一些实践经验和技术细节。此外,还讨论了模型的实际应用效果,特别是在某省级电网数据上的测试结果。 适合人群:从事电力系统数据分析的研究人员、工程师,以及对深度学习应用于时间序列预测感兴趣的开发者。 使用场景及目标:适用于需要精确预测未来电力负荷的情况,旨在帮助电力公司更好地规划发电计划,优化资源配置,保障电网安全稳定运行。通过本研究可以学习到如何构建高效的CNN-LSTM模型,并掌握利用GTO算法进行超参数优化的具体步骤。 其他说明:文中提到的一些技巧和注意事项有助于避免常见错误,提高模型性能。例如,合理的数据预处理方式、适当的超参数范围设定等都能显著改善最终的预测效果。
数据集一个高质量的医学图像数据集,专门用于脑肿瘤的检测和分类研究以下是关于这个数据集的详细介绍:该数据集包含5249张脑部MRI图像,分为训练集和验证集。每张图像都标注了边界框(Bounding Boxes),并按照脑肿瘤的类型分为四个类别:胶质瘤(Glioma)、脑膜瘤(Meningioma)、无肿瘤(No Tumor)和垂体瘤(Pituitary)。这些图像涵盖了不同的MRI扫描角度,包括矢状面、轴面和冠状面,能够全面覆盖脑部解剖结构,为模型训练提供了丰富多样的数据基础。高质量标注:边界框是通过LabelImg工具手动标注的,标注过程严谨,确保了标注的准确性和可靠性。多角度覆盖:图像从不同的MRI扫描角度拍摄,包括矢状面、轴面和冠状面,能够全面覆盖脑部解剖结构。数据清洗与筛选:数据集在创建过程中经过了彻底的清洗,去除了噪声、错误标注和质量不佳的图像,保证了数据的高质量。该数据集非常适合用于训练和验证深度学习模型,以实现脑肿瘤的检测和分类。它为开发医学图像处理中的计算机视觉应用提供了坚实的基础,能够帮助研究人员和开发人员构建更准确、更可靠的脑肿瘤诊断系统。这个数据集为脑肿瘤检测和分类的研究提供了宝贵的资源,能够帮助研究人员开发出更准确、更高效的诊断工具,从而为脑肿瘤患者的早期诊断和治疗规划提供支持。
内容概要:本文详细介绍了STM32F103的CAN通讯和IAP升级Bootloader的源码实现及其硬件设计。首先,针对CAN通讯部分,文章深入探讨了CAN外设的初始化配置,包括波特率、位时间、过滤器等重要参数的设置方法,并提供了一段完整的初始化代码示例。接着,对于IAP升级Bootloader,文中讲解了通过CAN总线接收HEX文件并写入Flash的具体实现步骤,以及如何安全地从Bootloader跳转到应用程序。此外,文章还附上了原理图和PCB文件,有助于理解和优化硬件设计。最后,作者分享了一些实用的调试技巧和注意事项,如终端电阻的正确使用、CRC校验的应用等。 适合人群:嵌入式系统开发者、硬件工程师、从事STM32开发的技术人员。 使用场景及目标:适用于正在开发STM32相关项目的工程师,尤其是那些需要实现CAN通讯和固件在线升级功能的人群。通过学习本文提供的源码和技术要点,可以帮助他们快速掌握相关技能,提高开发效率。 其他说明:本文不仅提供了详细的代码示例,还包含了丰富的实践经验分享,能够帮助读者更好地理解和解决实际开发中遇到的问题。
工具集语音、监控、摄像头、画笔等功能于一体!清晰语音录入,确保声画同步;监控级画面录制,操作细节无遗漏;摄像头多视角呈现,让内容更生动。录制时,画笔可标注重点,快速传递关键信息。自带视频播放,无需第三方;快捷键操作便捷,录制高效。强大解码器兼容多格式,不同设备随心播放。无论是教学、办公还是创作
内容概要:本文详细介绍了西门子S7-1500 PLC在制药厂洁净空调建筑管理系统(BMS)中的应用案例。重点讨论了硬件配置(1500 CPU + ET200SP分布式IO)、温湿度控制策略(串级PID、分程调节)、以及具体的编程实现(SCL语言)。文中分享了多个技术细节,如PT100温度采集、PID控制算法优化、报警管理和HMI界面设计等。此外,作者还提到了一些调试过程中遇到的问题及其解决方案,如PID_Compact块的手动模式设定值跳变问题、博图V15.1的兼容性问题等。 适合人群:从事工业自动化领域的工程师和技术人员,特别是那些对PLC编程、温湿度控制和洁净空调系统感兴趣的读者。 使用场景及目标:适用于制药厂或其他对温湿度控制要求严格的行业。主要目标是确保洁净空调系统的高效运行,将温湿度波动控制在极小范围内,保障生产环境的安全性和稳定性。 其他说明:本文不仅提供了详细的编程代码和硬件配置指南,还分享了许多实践经验,帮助读者更好地理解和应用相关技术。同时,强调了在实际项目中需要注意的关键点和潜在问题。
2025年6G近场技术白皮书2.0.pdf
少儿编程scratch项目源代码文件案例素材-Frogeon.zip
2025年感知技术十大趋势深度分析报告.pdf
内容概要:本文详细介绍了一种用于解决车间调度问题的遗传算法(Matlab实现),即JSPGA。文章首先介绍了遗传算法的基本概念及其在车间调度问题中的应用场景。接着,作者展示了完整的Matlab源码,包括参数设置、种群初始化、选择、交叉、变异、适应度计算以及结果输出等模块。文中还特别强调了适应度计算方法的选择,采用了最大完工时间的倒数作为适应度值,并通过三维甘特图和迭代曲线直观展示算法性能。此外,文章提供了多个调参技巧和改进方向,帮助读者更好地理解和应用该算法。 适合人群:对遗传算法感兴趣的研究人员、工程师以及希望深入理解车间调度问题求解方法的技术爱好者。 使用场景及目标:适用于需要优化多台机器、多个工件加工顺序与分配的实际工业生产环境。主要目标是通过遗传算法找到最优或近似最优的调度方案,从而减少最大完工时间,提高生产效率。 其他说明:文章不仅提供了详细的理论解释和技术细节,还包括了大量实用的代码片段和图表,使读者能够轻松复现实验结果。同时,作者还分享了一些个人经验和建议,为后续研究提供了有价值的参考。
内容概要:本文深入探讨了永磁同步电机(PMSM)的最大转矩电流比(MTPA)控制算法,并详细介绍了基于Simulink的仿真模型设计。首先,文章阐述了PMSM的数学模型,包括电压方程和磁链方程,这是理解控制算法的基础。接着,解释了矢量控制原理,通过将定子电流分解为励磁电流和转矩电流分量,实现对电机的有效控制。随后,重点讨论了MTPA控制的目标和方法,即在限定电流条件下最大化转矩输出。此外,文章还涉及了前馈补偿、弱磁控制和SVPWM调制等关键技术,提供了具体的实现代码和仿真思路。最后,通过一系列实验验证了各控制策略的效果。 适合人群:从事电机控制系统设计的研究人员和技术人员,尤其是对永磁同步电机和Simulink仿真感兴趣的工程师。 使用场景及目标:适用于希望深入了解PMSM控制算法并在Simulink环境中进行仿真的技术人员。主要目标是掌握MTPA控制的核心原理,学会构建高效的仿真模型,优化电机性能。 其他说明:文中不仅提供了详细的理论推导,还有丰富的代码示例和实践经验,有助于读者快速理解和应用相关技术。同时,强调了实际工程中常见的问题及解决方案,如负载扰动、弱磁控制和SVPWM调制等。
内容概要:本文详细介绍了三机并联的风光储混合系统在Matlab中的仿真方法及其关键技术。首先,针对光伏阵列模型,讨论了其核心二极管方程以及MPPT(最大功率点跟踪)算法的应用,强调了环境参数对输出特性的影响。接着,探讨了永磁同步风机的矢量控制,尤其是转速追踪和MPPT控制策略。对于混合储能系统,则深入讲解了超级电容和蓄电池的充放电策略,以及它们之间的协调机制。此外,还涉及了PQ控制的具体实现,包括双闭环结构的设计和锁相环的优化。最后,提供了仿真过程中常见的问题及解决方案,如求解器选择、参数敏感性和系统稳定性等。 适合人群:从事电力电子、新能源系统设计与仿真的工程师和技术人员,以及相关专业的研究生。 使用场景及目标:适用于希望深入了解风光储混合系统工作原理的研究人员,旨在帮助他们掌握Matlab仿真技巧,提高系统设计和优化的能力。 其他说明:文中不仅提供了详细的理论推导和代码示例,还分享了许多实践经验,有助于读者更好地理解和应用所学知识。
本书由国际发展研究中心(IDRC)和东南亚研究院(ISEAS)联合出版,旨在探讨亚洲背景下电子商务的发展与实践。IDRC自1970年起,致力于通过科学技术解决发展中国家的社会、经济和环境问题。书中详细介绍了IDRC的ICT4D项目,以及如何通过项目如Acacia、泛亚网络和泛美项目,在非洲、亚洲和拉丁美洲推动信息通信技术(ICTs)的影响力。特别强调了IDRC在弥合数字鸿沟方面所作出的贡献,如美洲连通性研究所和非洲连通性项目。ISEAS作为东南亚区域研究中心,专注于研究该地区的发展趋势,其出版物广泛传播东南亚的研究成果。本书还收录了电子商务在亚洲不同国家的具体案例研究,包括小型工匠和开发组织的电子商务行动研究、通过互联网直接营销手工艺品、电子营销人员的创新方法以及越南电子商务发展的政策影响。
2025工业5G终端设备发展报告.pdf
内容概要:本文档《Java经典面试笔试题及答案.docx》涵盖了广泛的Java基础知识和技术要点,通过一系列面试题的形式,深入浅出地讲解了Java的核心概念。文档内容包括但不限于:变量的声明与定义、对象序列化、值传递与引用传递、接口与抽象类的区别、继承的意义、方法重载的优势、集合框架的结构、异常处理机制、线程同步、泛型的应用、多态的概念、输入输出流的使用、JVM的工作原理等。此外,还涉及了诸如线程、GUI事件处理、类与接口的设计原则等高级主题。文档不仅解释了各个知识点的基本概念,还提供了实际应用场景中的注意事项和最佳实践。 适合人群:具备一定Java编程基础的学习者或开发者,特别是准备参加Java相关岗位面试的求职者。 使用场景及目标:①帮助读者巩固Java基础知识,提升对Java核心技术的理解;②为面试做准备,提供常见面试题及其详细解答;③指导开发者在实际项目中应用Java的最佳实践,优化代码质量和性能。 其他说明:文档内容详实,涵盖了Java开发中的多个方面,从基础语法到高级特性均有涉及。建议读者在学习过程中结合实际编程练习,加深对各个知识点的理解和掌握。同时,对于复杂的概念和技术,可以通过查阅官方文档或参考书籍进一步学习。
内容概要:本文详细介绍了如何利用MATLAB将预训练的深度学习模型(如ResNet50、YOLOv2和LaneNet)转化为高效的C++代码,并部署到嵌入式系统中。首先,通过ResNet50展示了图像分类任务的代码生成流程,强调了输入图像的预处理和归一化步骤。接着,YOLOv2用于车辆检测,讨论了anchor box的可视化及其优化方法,特别是在Jetson Nano平台上实现了显著的速度提升。最后,LaneNet应用于车道线识别,探讨了实例分割和聚类算法的实现细节,以及如何通过OpenMP和CUDA进行性能优化。文中还提供了多个实用技巧,如选择合适的编译器版本、处理自定义层和支持动态输入等。 适合人群:具有一定MATLAB和深度学习基础的研发人员,尤其是关注嵌入式系统和高性能计算的应用开发者。 使用场景及目标:适用于希望将深度学习模型高效部署到嵌入式设备的研究人员和工程师。主要目标是提高模型推理速度、降低内存占用,并确保代码的可移植性和易维护性。 其他说明:文中不仅提供了详细的代码示例和技术细节,还分享了许多实践经验,帮助读者避免常见的陷阱。此外,还提到了一些高级优化技巧,如SIMD指令集应用和内存管理策略,进一步提升了生成代码的性能。