
ه‰چ言
م€€م€€و•°وچ®è•´è—ڈن»·ه€¼ï¼Œن½†و•°وچ®çڑ„ن»·ه€¼éœ€è¦پ用آ ITآ وٹ€وœ¯هژ»هڈ‘çژ°م€پوژ¢ç´¢ï¼Œهڈ¯è§†هŒ–هڈ¯ن»¥ه¸®هٹ©ن؛؛و›´ه¥½çڑ„هژ»هˆ†وگو•°وچ®ï¼Œن؟،وپ¯çڑ„è´¨é‡ڈه¾ˆه¤§ç¨‹ه؛¦ن¸ٹن¾èµ–ن؛ژه…¶ه‘ˆçژ°و–¹ه¼ڈم€‚هœ¨و•°وچ®هˆ†وگن¸ٹ,çƒهٹ›ه›¾و— ç–‘وک¯ن¸€ç§چه¾ˆه¥½çڑ„و–¹ه¼ڈم€‚هœ¨ه¾ˆه¤ڑè،Œن¸ڑن¸éƒ½وœ‰ç€ه¹؟و³›çڑ„ه؛”用م€‚
م€€م€€وœ€è؟‘هˆڑه¥½é،¹ç›®ن¸éœ€è¦پ用هˆ° 3Dآ çƒهٹ›ه›¾çڑ„و•ˆوœه±•ç¤؛م€‚网ن¸ٹوگœن؛†ç›¸ه…³èµ„و–™ï¼Œهڈ‘çژ°ه¤§ه¤ڑو•°وک¯ 2Dآ و•ˆوœوˆ–者ن¼ھ 3Dآ çڑ„,而 3Dآ ç²’هگو•ˆوœه¯¹ن؛ژو€§èƒ½ن¸ٹçڑ„ن½“éھŒن¸چوک¯ه¾ˆه¥½ï¼Œن؛ژوک¯هڈ–ه·§ه†™ن؛†ن¸ھ 3Dآ çƒهٹ›ه›¾çڑ„و•ˆوœآ م€‚
م€€م€€Demo :آ http://www.hightopo.com/demo/heatMap3D/
م€€م€€éƒ¨هˆ†و•ˆوœه›¾ï¼ڑ
آ 
ه؛”用هœ؛و™¯

م€€م€€ه¤§و¥¼ه†…çڑ„ن؛؛ه‘کهˆ†ه¸ƒçƒهٹ›ه›¾م€‚وˆ‘ن»¬هڈ¯ن»¥é€ڑè؟‡è§‚ه¯ںهˆ°ن¸€ن¸ھهŒ؛هںںçڑ„颜色و·±وµ…و¥هˆ¤و–该هŒ؛هںںه†…ه®و—¶çڑ„ن؛؛ه‘کوµپهٹ¨وƒ…ه†µï¼Œçں¥éپ“ه“ھن¸ھهŒ؛هںںن؛؛ه¤ڑ,ه“ھن¸ھهŒ؛هںںن؛؛ه°‘م€‚该هœ؛و™¯هڈ¯é€‚用ن؛ژه¤§و¥¼ه†…çڑ„è¦هٹ،监وژ§ï¼Œهœ¨هڈ‘ç”ںçھپهڈ‘ن؛‹ن»¶و—¶ç§‘ه¦é«کو•ˆهœ°هˆ¶ه®ڑهˆ†وµپç–ڈه¯¼ç–ç•¥وڈگن¾›وœ‰هٹ›çڑ„ه¸®هٹ©ه’Œو”¯وŒپ,ه‡ڈه°‘وچںه¤±م€‚ن؛¦هڈ¯ç”¨ن؛ژçپ«é™©é¢„è¦ï¼Œç›‘وژ§هŒ؛هںںه®و—¶و¸©ه؛¦م€‚
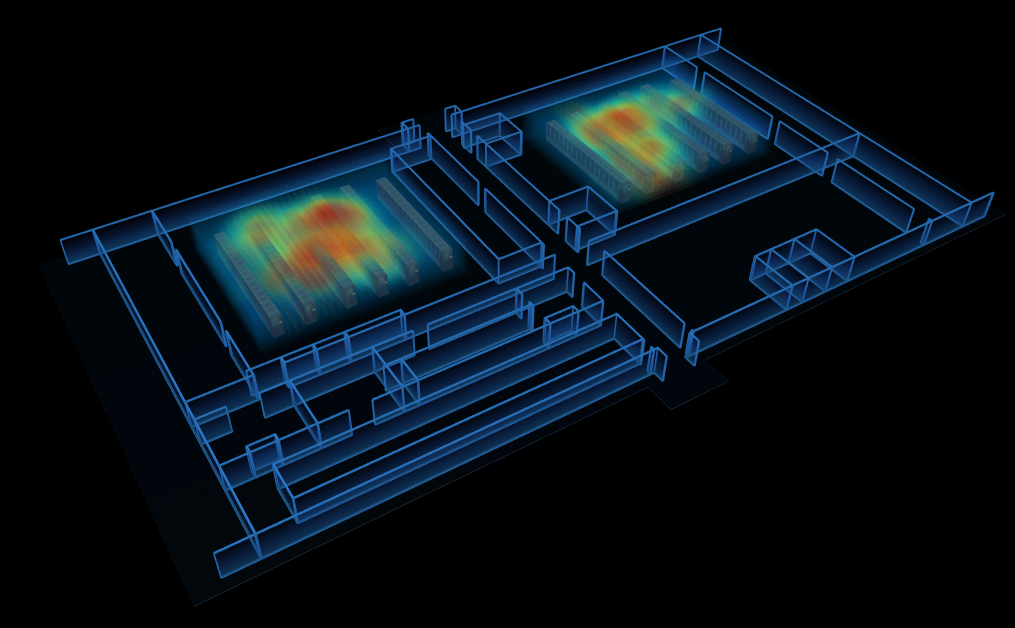
م€€م€€ه®¤ه†…设ه¤‡و¸©ه؛¦çƒهٹ›ه›¾م€‚ن¼ ç»ںçڑ„و•°وچ®ن¸ه؟ƒو±‡وٹ¥و–¹ه¼ڈو¯ç‡¥هچ•è°ƒم€پçœںه®و„ںن¸چه¼؛,ن؛’هٹ¨و€§ه·®ç‰ï¼Œه€ںهٹ©ن؛ژ 3D çƒهٹ›ه›¾çڑ„هڈ¯è§†هŒ–ه‘ˆçژ°و–¹ه¼ڈ,وœ؛وˆ؟è؟گç»´ç®،çگ†ن؛؛ه‘کهڈ¯ه¤§ه¤§وڈگé«که·¥ن½œو•ˆçژ‡هڈٹé™چن½ژه·¥ن½œه¤±è¯¯çڑ„هڈ¯èƒ½و€§م€‚
و•´ن½“و€è·¯
م€€م€€هœ¨هœ؛و™¯هڈچه؛ڈهˆ—هŒ–ن¹‹هگژ,设置çƒهٹ›ه›¾çڑ„هˆه§‹هڈ‚و•°ï¼Œهˆه§‹هŒ–هگژه¾—هˆ°çڑ„çƒهٹ›ه›¾و¨،ه‹و·»هٹ è؟›هœ؛و™¯ن¸ï¼Œو¨،و‹ں 3D çƒهٹ›ه›¾و•ˆوœï¼Œوœ€هگژه†چو·»هٹ و‰«وڈڈم€پوچ¢è‚¤م€پو¸©ه؛¦وڈگç¤؛ç‰هٹں能م€‚
1.و•°وچ®ه‡†ه¤‡
م€€م€€هœ¨هœ؛و™¯ن¸ç”»ه‡؛çƒهٹ›ه›¾çڑ„هŒ؛هںں,ه¦‚ه›¾
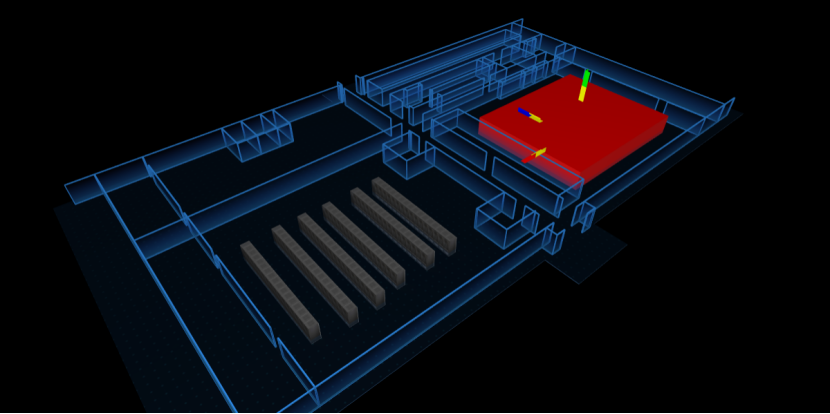
م€€م€€é¦–ه…ˆç،®ه®ڑè¦پç”ںوˆگçƒهٹ›ه›¾çڑ„هŒ؛هںں areaNode ,然هگژéڑڈوœ؛ç”ںوˆگآ 20آ آ ن¸ھ点çڑ„ن؟،وپ¯ï¼ŒهŒ…هگ«هگو ‡ position (هگو ‡وک¯ç›¸ه¯¹ç؛¢è‰²é•؟و–¹ن½“çڑ„وںگن¸ھé،¶ç‚¹ï¼‰ هڈٹçƒهٹ›ه€¼ temperatureآ م€‚
م€€م€€ن»¥ن¸‹وک¯è¯¥éƒ¨هˆ†çڑ„ن¸»è¦پن»£ç پï¼ڑ
function getTemplateList(areaNode, hot, num) {
let heatRect = areaNode.getRect();
let { width, height } = heatRect;
let rackTall = areaNode.getTall();
hot = hot + this.random(20);
let templateList = [];
for (let i = 0; i < num; i++) {
templateList.push({
position: {
x: 0.2 * width + this.random(0.6 * width),
y: 0.2 * height + this.random(0.6 * height),
z: 0.1 * rackTall + this.random(0.8 * rackTall)
},
temperature: hot
});
}
return templateList;
}
let heatMapArea_1 = dm.getDataByTag('heatMapArea_1');
let templateList_1 = this.getTemplateList(
heatMapArea_1,
70,
20
);
آ
2.هˆه§‹هŒ–
م€€م€€ن½؟用آ ht-thermodynamic.jsآ وڈ’ن»¶و¥ç”ںوˆگçƒهٹ›ه›¾م€‚
آ م€€م€€هڈ‘çƒç‚¹çڑ„و•°وچ®ه‡†ه¤‡ه¥½هگژ,وژ¥ç€é…چç½®çƒهٹ›ه›¾çڑ„هڈ‚و•°ï¼Œهڈ‚و•°è¯´وکژه¦‚ن¸‹م€‚
// é»ک认é…چç½®
let config = {
hot: 45,
min: 20,
max: 55,
size: 50,
pointNum: 20,
radius: 150,
opacity: 0.05,
colorConfig: {
0: 'rgba(0,162,255,0.14)',
0.2: 'rgba(48,255,183,0.60)',
0.4: 'rgba(255,245,48,0.70)',
0.6: 'rgba(255,73,18,0.90)',
0.8: 'rgba(217,22,0,0.95)',
1: 'rgb(179,0,0)'
},
colorStopFn: function (v, step) { return v * step * step },
};
// èژ·هڈ–هŒ؛هںںو•°وچ®
let rackTall = areaNode.getTall();
let heatRect = areaNode.getRect();
let { width, height } = heatRect;
if (width === 0 || height === 0) return;
// çƒهٹ›ه›¾هˆه§‹هŒ–
let thd = this.thd = new ht.thermodynamic.Thermodynamic3d(g3d, {
// çƒهٹ›ه›¾و‰€هچ 用çڑ„ç©؛é—´
box: new ht.Math.Vector3(width, height, rackTall),
// é…چç½®و¸©ه؛¦çڑ„وœ€ه°ڈه€¼ه’Œوœ€ه¤§ه€¼
min: config.min,
max: config.max,
// و¯ڈن¸€ç‰‡çڑ„و¸²وں“é—´éڑ”
interval: 40,
// ن¸؛falseو—¶ï¼Œو¸©ه؛¦هŒ؛هںںن؛¤é›†و—¶ه€¼ن¸چç´¯هٹ ,هڈ–وœ€é«کو¸©ه؛¦
remainMax: false,
// و¯ڈن¸€ç‰‡çڑ„é€ڈوکژه؛¦
opacity: config.opacity,
// 颜色و¥è؟›
colorStopFn: config.colorStopFn,
// 颜色范ه›´
gradient: config.colorConfig
});م€€
آ
3.هٹ è½½çƒهٹ›ه›¾
م€€م€€ه°†ç¬¬ن¸€و¥ç”ںوˆگçڑ„هڈ‘çƒç‚¹ï¼Œè®¾ç½® thd çڑ„و•°وچ®ه¯¹è±،,调用 thd.createThermodynamicNode() و¥ç”ںوˆگçƒهٹ›ه›¾çڑ„ 3Dآ ه›¾ه…ƒم€‚设置ه…¶ç›¸ه…³ن؟،وپ¯ï¼Œه°†è¯¥ه›¾ه…ƒو·»هٹ è؟› 3D هœ؛و™¯ن¸م€‚è؟™و ·ن¸€ن¸ھ简هچ•çڑ„ 3Dآ çƒهٹ›ه›¾ه°±ç®—ه®Œوˆگن؛†م€‚
// هٹ è½½çƒهٹ›ه›¾
function loadThermodynamic(thd, areaNode, templateList, config) {
thd.setData(templateList);
// x,y,zé¢و•°
let node = this.heatNode = thd.createThermodynamicNode(config.size, config.size, config.size);
let p3 = areaNode.p3();
node.setAnchorElevation(0);
node.p3(p3);
node.s({
'interactive': true,
'preventDefaultWhenInteractive': false,
'3d.movable': false,
"wf.visible": false
});
g3d.dm().add(node);
}
آ
م€€م€€ن¸»ن½“ن»‹ç»چه®Œن؛†ï¼Œçژ°هœ¨ه¼€ه§‹è®²è®²è¯¥ demo çڑ„ه‡ ن¸ھهٹں能م€‚
4.و¸©ه؛¦وڈگç¤؛

م€€م€€ه› ن¸؛هœ¨ 3D هœ؛و™¯ن¸ï¼Œوˆ‘ن¸چه¥½هˆ¤و–ه½“ه‰چé¼ و ‡هگو ‡ï¼ˆx,y,z),و‰€ن»¥وˆ‘ه°† tip é¢و؟و”¾هœ¨ن؛† 2D ه›¾ç؛¸ن¸ٹ,ه°† 2D ه›¾ç؛¸هµŒهœ¨ 3D هœ؛و™¯çڑ„ن¸ٹه±‚م€‚é€ڑè؟‡ç›‘هگ¬ 3D هœ؛و™¯ن¸çڑ„ onMove ن؛‹ن»¶و¥وژ§هˆ¶ tip é¢و؟çڑ„وک¾éڑگهڈٹه€¼çڑ„هڈکهŒ–م€‚
م€€م€€tip وک¾éڑگوژ§هˆ¶ï¼ڑه½“é¼ و ‡ç§»ه…¥è؟›çƒهٹ›ه›¾هŒ؛هںںو—¶ï¼Œtip وک¾ç¤؛,هڈچن¹‹هˆ™éڑگè—ڈم€‚هœ¨è؟™وˆ‘éپ‡هˆ°ن؛†ن¸ھé—®é¢ک,ه› ن¸؛وˆ‘وٹٹ除ن؛†çƒهٹ›ه›¾هŒ؛ه—ن»¥ه¤–çڑ„设置وˆگن¸چهڈ¯ن؛¤ن؛’çڑ„,ه½“é¼ و ‡ç§»ه‡؛هŒ؛هںںهگژ,و— و³•ç›‘هگ¬هˆ° onMove ن؛‹ن»¶ï¼Œه¯¼è‡´ bug,tip é¢و؟ه§‹ç»ˆهکهœ¨ç€م€‚وˆ‘ن½؟用ن؛†آ setTimeoutآ و¥è§£ه†³è؟™é—®é¢ک,ه»¶و—¶1sهگژè‡ھهٹ¨éڑگè—ڈ,ن½†هگژو¥هڈ‘çژ°ه®Œه…¨و²،ه؟…è¦پو»¥ç”¨ setTimeout ,هڈھè¦پ监هگ¬آ onLeaveآ و—¶éڑگè—ڈ tip ه°±è،Œن؛†م€‚
م€€م€€tip ه€¼وژ§هˆ¶ï¼ڑ调用 ht-thermodynamic.js çڑ„و–¹و³•هڈ¯ن»¥èژ·هڈ–هˆ°ه½“ه‰چé¼ و ‡ç›¸ه¯¹çƒهٹ›ه›¾هŒ؛هںںçڑ„و¸©ه؛¦ه€¼ thd.getHeatMapValue(e.event,'middle'),ه®و—¶و”¹هڈک tip é¢و؟çڑ„ value ه±و€§ م€‚
م€€م€€ن»£ç په¦‚ن¸‹ï¼ڑ
// ن؛¤ن؛’و•ˆوœ
g3d.mi(e => {
if (e.kind === 'onMove') {
let { clientX, clientY } = e.event;
if (this.templateTip) {
let value1 = this.thd1.getHeatMapValue(e.event, 'middle');
let value2 = this.thd2.getHeatMapValue(e.event, 'middle');
if (value1 || value1 === 0 || value2 || value2 === 0) {
let position = g2d.getLogicalPoint({ x: clientX, y: clientY })
this.templateTip.a('value', value1 || value2 || 0)
let { width, height } = this.templateTip.getRect()
this.templateTip.setPosition({ x: position.x + width / 2, y: position.y - height / 2 })
}
}
} else if (kind === 'onLeave') {
let tag = data.getTag()
if (tag && tag.hasOwnProperty('hoverBlock') > -1) {
this.g2d.getView().style.cursor = 'default';
}
this.templateTip && this.setVisible(this.templateTip, false)
}
})
آ
5.و‰«وڈڈ

م€€م€€ه°†ç¬¬ن¸‰و¥ن¸çڑ„آ thd.createThermodynamicNode() و›؟وچ¢م€‚هœ¨ç”ںوˆگçƒهٹ›ه›¾ه¯¹è±،و—¶ï¼Œن¸چç›´وژ¥è؟”ه›ن¸€ن¸ھو¨،ه‹ï¼Œè€Œوک¯é€‰و‹©وںگن¸€ن¸ھو–¹هگ‘è؟›è،Œâ€œهˆ‡ه‰²â€ï¼Œه°†è؟™ن¸€و–¹هگ‘çڑ„é•؟ه؛¦ه‡هˆ†ن¸؛ n ن»½ï¼Œé€ڑè؟‡ thd.getHeatMap()آ آ و–¹و³•و¥èژ·هڈ–و¯ڈن¸€ç‰‡çڑ„çƒوˆگهƒڈم€‚n çڑ„ه€¼çگ†è®؛ن¸ٹهڈ¯ن»¥هڈ–ن»»و„ڈه€¼ï¼Œن½†ن¸؛ن؛†و¸²وں“و•ˆوœو›´ه¥½ن¸€ç‚¹ï¼Œè؟™é‡Œوˆ‘هڈ–çڑ„وک¯آ 50,ن¸چ至ن؛ژه¤ھه¤ڑ而ه¯¼è‡´é¦–و¬،و¸²وں“و—¶é—´è؟‡é•؟م€‚و¯ڈهˆ‡ه‡؛ن¸€ن¸ھé¢ï¼Œوˆ‘ن»¬ه°±هœ¨çƒهٹ›هŒ؛هںںçڑ„相ه¯¹ن½چç½®ن¸ٹهٹ¨و€پهˆ›ه»؛ن¸€ن¸ھ ht.Node ,وژ¥ç€ن½؟用آ ht.Default.setImage() ه°†هˆ‡ه‡؛و¥çڑ„é¢و³¨ه†Œوˆگه›¾ç‰‡ï¼Œهژ»è®¾ç½®وˆگ该 node çڑ„è´´ه›¾ï¼ˆهڈھ需设置هˆ‡ه‰²و–¹هگ‘ن¸ٹçڑ„ن¸¤ن¸ھé¢ه°±è،Œï¼‰م€‚وœ€هگژه°†و‰€وœ‰çڑ„ node و·»هٹ è؟›آ dataModelآ (آ ht ن¸و‰؟è½½آ Dataآ و•°وچ®çڑ„و¨،ه‹ï¼‰م€‚
م€€م€€و‰«وڈڈهٹں能,وœ‰ن¸¤ç§چو–¹و،ˆم€‚第ن¸€ç§چوک¯هœ¨و¥éھ¤ 3 هˆ‡ه‰²è´´ç‰‡و—¶ï¼Œن¸چهژ»هˆ›ه»؛ n ن¸ھآ node ,而وک¯هڈھهˆ›ه»؛ن¸€ن¸ھ,然هگژهٹ¨و€پهژ»è®¾ç½®è¯¥ node çڑ„è´´ه›¾هڈٹهگو ‡ï¼Œو¨،و‹ںو‰«وڈڈو•ˆوœï¼›ç¬¬ن؛Œç§چن¾و—§هˆ›ه»؛ n ن¸ھ node,然هگژه…¨éƒ¨éڑگè—ڈ,é€ڑè؟‡ن¸چهگŒو—¶هˆ»و¥وژ§هˆ¶è®©ه…¶ن¸وںگن¸€ن¸ھèٹ‚点وک¾ç¤؛,و¨،و‹ںو‰«وڈڈهٹں能م€‚è؟™é‡Œوˆ‘采用ن؛†ç¬¬ن؛Œç§چ,ه› ن¸؛第ن¸€ç§چè¦پهژ»é¢‘ç¹پçڑ„ن؟®و”¹ه¤ڑç§چه±و€§و‰چ能达هˆ°و•ˆوœï¼Œç¬¬ن؛Œç§چçڑ„è¯هڈھè¦پوژ§هˆ¶ه…¶ '3d.visible'م€‚
م€€م€€ن¸»è¦پن»£ç په¦‚ن¸‹ï¼ڑ
let length;
if (dir === 'z') {
length = rackTall;
}
else if (dir === 'x') {
length = width;
}
else if (dir === 'y') {
length = height;
}
let size = config.size;
for (let index = 0; index < size; index++) {
// çƒهٹ›هˆ‡ه›¾é—´éڑ”
const offset = length / size;
let timer = setTimeout(() => {
let ctx = thd.getHeatMap(index * offset, dir, colorConfig);
let floor = this.getHeatFloor(
areaNode,
dir,
ctx,
index,
size,
config
);
this.floors.push(floor);
dm.add(floor);
}, 0);
this.timers.push(timer);
}
function start() {
this.hide();
this.anim = true;
this.count = 0;
let frames = this.floors.length;
let params = {
frames, // هٹ¨ç”»ه¸§و•°
interval: 50, // هٹ¨ç”»ه¸§é—´éڑ”و¯«ç§’و•°
easing: t => {
return t;
},
finishFunc: () => {
if (this.anim) {
this.start();
}
},
action: (v, t) => {
this.count++;
this.show(this.count);
}
};
this.scanning = ht.Default.startAnim(params);
}
function hide(index) {
if (index || index === 0) {
this.floors.forEach((i, j) => {
if (index === j) {
i.s('3d.visible', false);
}
else {
i.s('3d.visible', true);
}
});
}
else {
this.floors.forEach(i => {
i.s('3d.visible', false);
});
}
}
function show(index) {
if (index || index === 0) {
this.floors.forEach((i, j) => {
if (index === j) {
i.s('3d.visible', true);
}
else {
i.s('3d.visible', false);
}
});
}
else {
this.floors.forEach(i => {
i.s('3d.visible', true);
});
}
}
آ
第ن¸€ç§چو–¹ه¼ڈه®çژ°ن¸»è¦پن»£ç پï¼ڑ
getHeatFloor(node, dir, config) {
let { width, height } = node.getRect();
let rackTall = node.getTall();
let s3 = [1, rackTall, height];
let floor = new ht.Node();
floor.setTag('hotspot');
floor.setAnchor3d({
x: 0.5,
y: 0.5,
z: 0.5
});
floor.s3(s3);
floor.s({
interactive: true,
preventDefaultWhenInteractive: false,
'3d.selectable': true,
'3d.movable': false,
'all.visible': false,
[Top + '.visible']: true,
[Top + '.opacity']: config.opacity,
[Top + '.transparent']: true,
[Top + '.reverse.flip']: true,
[Top + '.color']: 'rgba(51,255,231,0.10)'
});
return floor
}
getHeatFloorInfo(node, dir, ctx, index, size, config) {
let { width, height } = node.getRect();
let rackTall = node.getTall();
let point = node.getPosition3d();
let part = 0;
let p3, s3;
let Top = 'top';
if (!dir) {
dir = 'z';
}
// çƒهٹ›ه›¾çڑ„yzو–¹هگ‘ن¸ژhtçڑ„yzو–¹هگ‘相هڈچ dir=zن»£è،¨çڑ„وک¯ç«–ç›´و–¹هگ‘
if (dir === 'x') {
Top = 'left';
part = (width / size) * index;
p3 = [
point[0] - width / 2 + part,
point[1] + rackTall / 2,
point[2]
];
// p3 = [point[0] + part, point[1], point[2]];
s3 = [1, rackTall, height];
}
else if (dir === 'y') {
Top = 'front';
part = (height / size) * index;
p3 = [
point[0],
point[1] + rackTall / 2,
point[2] - height / 2 + part
];
s3 = [width, rackTall, 1];
}
else if (dir === 'z') {
Top = 'top';
part = (rackTall / size) * index;
p3 = [point[0], point[1] + part, point[2]];
s3 = [width, 1, height];
}
let heatName = this.generateUUID();
ht.Default.setImage('heatMap' + heatName, ctx);
this.heatFloorInfo.push(
{
img: 'heatMap' + heatName,
p3
}
)
}
show(index){
let info = this.heatFloorInfo[index]
this.floor.p3(info.p3)
this.floor.s('3d.visible', true);
this.floor.s('top.image', info.img);
// و‰‹هٹ¨هˆ·و–°
this.floor.iv();
}
آ
6.وچ¢è‚¤

م€€م€€وچ¢è‚¤çڑ„ه®çژ°هژںçگ†ï¼ڑو ¹وچ®ن¸چهگŒçڑ„هœ؛و™¯ه€¼هژ»هٹ¨و€پن؟®و”¹ ht.graph3d.Graph3dView çڑ„背و™¯è‰²هڈٹه¢™çڑ„颜色ç‰م€‚
م€€م€€ن»£ç پ
function changeSkin() {
let backgroundColor = this.g3d.dm().getBackground(),
dark_bg = this.g3d.dm().getDataByTag('dark_skin'),
light_bg = this.g3d.dm().getDataByTag('light_skin');
if (backgroundColor !== 'rgb(255,255,255)') {
this.g3d.dm().setBackground('rgb(255,255,255)');
} else {
this.g3d.dm().setBackground('rgb(0,0,0)');
}
dark_bg.s('2d.visible', !dark_bg.s('2d.visible'));
dark_bg.s('3d.visible', !dark_bg.s('3d.visible'));
light_bg.s('2d.visible', !light_bg.s('2d.visible'));
light_bg.s('3d.visible', !light_bg.s('3d.visible'));
}
آ
آ م€€م€€وœ¬ç¯‡ه°±ن»‹ç»چهˆ°ن؛†ï¼Œç›®ه‰چ ht-thermodynamic.js è؟که¤„ن؛ژوµ‹è¯•éک¶و®µï¼Œه¾…هˆ°ç›¸ه¯¹وˆگç†ںهگژه†چو›´و–°è¯¥ demo ,وœ‰ه…´è¶£ن؛†è§£و›´ه¤ڑه…³ن؛ژ 2D/3D هڈ¯è§†هŒ–çڑ„و„ه»؛,هڈ¯ç؟»éک…ه…¶ن»–و–‡ç« çڑ„ن¾‹هگ,HT ن¼ڑç»™ن½ ه¾ˆه¤ڑن¸چهڈ¯و€è®®çڑ„ن¸œè¥؟م€‚









相ه…³وژ¨èچگ
综ن¸ٹو‰€è؟°ï¼Œè؟™ن¸ھé،¹ç›®ه±•ç¤؛ن؛†HTML5 Canvasçڑ„ه¼؛ه¤§هٹں能,特هˆ«وک¯ه¦‚ن½•ç”¨JavaScriptه®çژ°ه¤چو‚çڑ„3D视觉و•ˆوœم€‚é€ڑè؟‡ه¦ن¹ ه’Œçگ†è§£è؟™و®µو؛گç پ,ه¼€هڈ‘者ن¸چن»…هڈ¯ن»¥وژŒوڈ،Canvasçڑ„هں؛وœ¬ç”¨و³•ï¼Œè؟ک能و·±ه…¥çگ†è§£3Dه›¾ه½¢و¸²وں“çڑ„هژںçگ†ï¼Œه¯¹وڈگهچ‡ه‰چ端ه¼€هڈ‘وٹ€èƒ½...
EChartsهں؛ن؛ژHTML5çڑ„Canvasوٹ€وœ¯ï¼Œèƒ½ه¤ںه®çژ°é«کو€§èƒ½çڑ„و¸²وں“م€‚ ن؛Œم€پè¯چن؛‘ه›¾çڑ„و¦‚ه؟µ è¯چن؛‘ه›¾ï¼ˆWord Cloud)وک¯ن¸€ç§چ视觉è،¨çژ°ه½¢ه¼ڈ,é€ڑè؟‡ه¤§ه°ڈن¸چن¸€م€په½¢çٹ¶هگ„ه¼‚çڑ„و–‡ه—و¥ه±•ç¤؛و•°وچ®ï¼Œه…¶ن¸و¯ڈن¸ھè¯چçڑ„ه¤§ه°ڈن¸ژه…¶هœ¨و•°وچ®ن¸çڑ„频çژ‡وˆگو£و¯”م€‚è؟™ç§چه›¾...
首ه…ˆï¼Œوˆ‘ن»¬éœ€è¦پçگ†è§£è‰²و–‘ه›¾ï¼ˆن¹ں称ن¸؛çƒهٹ›ه›¾وˆ– choropleth map)وک¯ن¸€ç§چ用颜色è،¨ç¤؛هŒ؛هںںو•°وچ®ه¯†ه؛¦وˆ–و•°ه€¼çڑ„هœ°ه›¾م€‚هœ¨وœ¬ن¾‹ن¸ï¼Œوˆ‘ن»¬هڈ¯èƒ½وœ‰ن¸€ن¸ھهŒ…هگ«هœ°çگ†è¾¹ç•Œه’Œه¯¹ه؛”و•°ه€¼çڑ„و•°وچ®é›†ï¼Œه¦‚ن؛؛هڈ£ه¯†ه؛¦وˆ–و”¶ه…¥و°´ه¹³م€‚Turf.js وڈگن¾›ن؛†ه¤ڑç§چو–¹و³•...
و´›è°·و„ڑن؛؛èٹ‚و¯”èµ›.pdf
ه†…ه®¹و¦‚è¦پï¼ڑوœ¬و–‡و،£وک¯هŒ—ن؛¬è؟…ن¸؛电هگوœ‰é™گه…¬هڈ¸é’ˆه¯¹iTOP-3568ه¼€هڈ‘و؟çڑ„Linuxç³»ç»ںه¼€هڈ‘ه’Œه؛”用ه¼€هڈ‘و‰‹ه†Œï¼Œè¯¦ç»†ن»‹ç»چن؛†ه¼€هڈ‘و؟هœ¨Linuxç³»ç»ںن¸‹çڑ„é…چç½®ن¸ژه¼€هڈ‘و–¹و³•م€‚و‰‹ه†Œو¶µç›–Buildrootم€پDebianم€پUbuntuç‰ه¤ڑن¸ھLinuxهڈ‘è،Œç‰ˆçڑ„ç³»ç»ںه¼€هڈ‘笔记,و¶‰هڈٹه±ڈه¹•è®¾ç½®م€په¾…وœ؛ه’Œé”په±ڈم€پوک¾ç¤؛颜色و ¼ه¼ڈم€پهˆ†è¾¨çژ‡ه’Œç¼©و”¾م€پé™و€پIP设置م€پQt程ه؛ڈو“چن½œم€په¼€وœ؛è‡ھهگ¯م€پéں³é¢‘视频ه’Œو‘„هƒڈه¤´ه¼€هڈ‘م€پVNCه’ŒToDeskè؟œç¨‹وژ§هˆ¶è½¯ن»¶ه®‰è£…ç‰ه†…ه®¹م€‚هگŒو—¶ï¼Œو‰‹ه†Œè؟کوڈگن¾›ن؛†ه…³ن؛ژBuildroot编译ه¸¸è§پé—®é¢کçڑ„解ه†³و–¹و،ˆم€پU-Bootه’Œه†…و ¸ه¼€هڈ‘细èٹ‚,ن»¥هڈٹIO电و؛گهںںçڑ„é…چç½®و–¹و³•م€‚و‰‹ه†Œن¸چن»…适用ن؛ژهˆو¬،وژ¥è§¦هµŒه…¥ه¼ڈLinuxç³»ç»ںçڑ„ه¼€هڈ‘者,ن¹ں适هگˆوœ‰ن¸€ه®ڑç»ڈéھŒçڑ„ç ”هڈ‘ن؛؛ه‘کو·±ه…¥ه¦ن¹ م€‚ 适هگˆن؛؛群ï¼ڑه…·ه¤‡ن¸€ه®ڑ编程هں؛ç،€ï¼Œه°¤ه…¶وک¯ه¯¹Linuxç³»ç»ںه’ŒهµŒه…¥ه¼ڈه¼€هڈ‘وœ‰ن¸€ه®ڑن؛†è§£çڑ„ç ”هڈ‘ن؛؛ه‘ک,ه·¥ن½œ1-3ه¹´çڑ„ه·¥ç¨‹ه¸ˆï¼Œن»¥هڈٹه¸Œوœ›و·±ه…¥ن؛†è§£هµŒه…¥ه¼ڈLinuxç³»ç»ںه¼€هڈ‘çڑ„爱ه¥½è€…م€‚ ن½؟用هœ؛و™¯هڈٹç›®و ‡ï¼ڑâ‘ ه¸®هٹ©ç”¨وˆ·وژŒوڈ،iTOP-3568ه¼€هڈ‘و؟هœ¨Linuxç³»ç»ںن¸‹çڑ„هں؛وœ¬é…چç½®ن¸ژé«کç؛§ه¼€هڈ‘وٹ€ه·§ï¼›â‘،وŒ‡ه¯¼ç”¨وˆ·è§£ه†³Linuxç³»ç»ںه¼€هڈ‘ن¸éپ‡هˆ°çڑ„ه¸¸è§پé—®é¢ک;③ن¸؛用وˆ·وڈگن¾›è¯¦ç»†çڑ„编译ه’Œè°ƒè¯•وŒ‡هچ—,ç،®ن؟ه¼€هڈ‘و؟能
ه†…ه®¹و¦‚è¦پï¼ڑوœ¬و–‡وژ¢è®¨ن؛†هں؛ن؛ژMATLAB2020bه¹³هڈ°ï¼Œé‡‡ç”¨CNN-LSTMو¨،ه‹ç»“هگˆن؛؛ه·¥ه¤§çŒ©çŒ©éƒ¨éکں(GTO)ç®—و³•è؟›è،Œç”µهٹ›è´ںèچ·é¢„وµ‹çڑ„و–¹و³•م€‚首ه…ˆن»‹ç»چن؛†CNN-LSTMو¨،ه‹çڑ„هں؛وœ¬ç»“و„هڈٹه…¶هœ¨ه¤„çگ†ه¤ڑهڈکé‡ڈ输ه…¥ï¼ˆه¦‚هژ†هڈ²è´ںèچ·ه’Œو°”è±،و•°وچ®ï¼‰و–¹é¢çڑ„ن¼کهٹ؟م€‚éڑڈهگژ详细解é‡ٹن؛†و¨،ه‹هگ„ه±‚çڑ„هٹں能,هŒ…و‹¬هچ·ç§¯ه±‚م€پو± هŒ–ه±‚م€پLSTMه±‚ه’Œه…¨è؟وژ¥ه±‚çڑ„ن½œç”¨م€‚وژ¥ç€è®¨è®؛ن؛†è¶…هڈ‚و•°é€‰و‹©çڑ„é‡چè¦پو€§ï¼Œه¹¶ه¼•ه…¥GTOç®—و³•و¥è؟›è،Œè¶…هڈ‚و•°ن¼کهŒ–,وڈگé«کو¨،ه‹é¢„وµ‹ç²¾ه؛¦م€‚و–‡ن¸ه±•ç¤؛ن؛†ه…·ن½“çڑ„MATLABن»£ç پç¤؛ن¾‹ï¼Œو¶µç›–ن؛†و•°وچ®é¢„ه¤„çگ†م€پو¨،ه‹و„ه»؛م€پè®ç»ƒé…چç½®ç‰و–¹é¢çڑ„ه†…ه®¹م€‚و¤ه¤–,è؟کهˆ†ن؛«ن؛†ن¸€ن؛›ه®è·µç»ڈéھŒï¼Œه¦‚هچ·ç§¯و ¸é…چç½®م€پLSTMèٹ‚点و•°è®¾ه®ڑç‰م€‚ 适هگˆن؛؛群ï¼ڑن»ژن؛‹ç”µهٹ›ç³»ç»ںو•°وچ®هˆ†وگçڑ„ç ”ç©¶ن؛؛ه‘که’Œوٹ€وœ¯ن؛؛ه‘ک,ه°¤ه…¶وک¯ه¯¹و·±ه؛¦ه¦ن¹ ه؛”用ن؛ژ电هٹ›è´ںèچ·é¢„وµ‹و„ںه…´è¶£çڑ„读者م€‚ ن½؟用هœ؛و™¯هڈٹç›®و ‡ï¼ڑ适用ن؛ژ需è¦پç²¾ç،®é¢„وµ‹وœھو¥ç”µهٹ›è´ںèچ·çڑ„هœ؛هگˆï¼Œو—¨هœ¨ه¸®هٹ©ç”µهٹ›ه…¬هڈ¸و›´ه¥½هœ°è§„هˆ’هڈ‘电è®،هˆ’,ن¼کهŒ–资و؛گé…چ置,ن؟éڑœç”µç½‘ه®‰ه…¨ç¨³ه®ڑè؟گè،Œم€‚é€ڑè؟‡وœ¬ç¯‡و–‡ç« çڑ„ه¦ن¹ ,读者هڈ¯ن»¥وژŒوڈ،ه¦‚ن½•ن½؟用MATLABه®çژ°CNN-LSTMو¨،ه‹ï¼Œه¹¶ه¦ن¼ڑè؟گ用GTOç®—و³•ن¼کهŒ–超هڈ‚و•°ï¼Œن»ژ而وڈگهچ‡é¢„وµ‹ه‡†ç،®و€§م€‚ ه…¶ن»–说وکژï¼ڑو–‡ç« ه¼؛è°ƒن؛†و•°وچ®è´¨é‡ڈه’Œé¢„ه¤„çگ†و¥éھ¤çڑ„é‡چè¦پو€§ï¼ŒوŒ‡ه‡؛é«کè´¨é‡ڈçڑ„输ه…¥و•°وچ®èƒ½ه¤ںوک¾è‘—و”¹ه–„预وµ‹و•ˆوœم€‚هگŒو—¶وڈگ醒读者و³¨و„ڈو¨،ه‹è®ç»ƒè؟‡ç¨‹ن¸çڑ„ن¸€ن؛›ه¸¸è§پé™·éک±ï¼Œه¦‚éپ؟ه…چè؟‡ه؛¦و‹ںهگˆç‰é—®é¢کم€‚
ه†…ه®¹و¦‚è¦پï¼ڑوœ¬و–‡è¯¦ç»†ن»‹ç»چن؛†TIG(钨وپوƒ°و€§و°”ن½“ن؟وٹ¤ç„ٹ)ن؛Œç»´ç”µه¼§ن»؟çœںçڑ„çگ†è®؛هں؛ç،€ه’Œç¨‹ه؛ڈه®çژ°م€‚首ه…ˆéکگè؟°ن؛†TIG电ه¼§çڑ„وœ¬è´¨هڈٹه…¶هœ¨ن؛Œç»´ن»؟çœںن¸çڑ„و•°ه¦وڈڈè؟°ï¼Œن¸»è¦پ采用ç£پوµپن½“هٹ¨هٹ›ه¦ï¼ˆMHD)و–¹ç¨‹è؟›è،Œه»؛و¨،م€‚وژ¥ç€ه±•ç¤؛ن؛†ه¦‚ن½•ن½؟用Pythonç”ںوˆگن»؟çœںو‰€éœ€çڑ„网و ¼ï¼Œه¹¶هˆه§‹هŒ–و¸©ه؛¦هœ؛م€پé€ںه؛¦هœ؛ه’Œç”µهœ؛ه¼؛ه؛¦ç‰ç‰©çگ†هڈ‚و•°م€‚éڑڈهگژ,é€ڑè؟‡è؟ن»£و±‚解MHDو–¹ç¨‹ï¼Œé€گو¥و›´و–°هگ„物çگ†é‡ڈ,وœ€ç»ˆه¾—هˆ°ç”µه¼§ه†…部çڑ„و¸©ه؛¦م€پé€ںه؛¦ه’Œç”µهœ؛هˆ†ه¸ƒوƒ…ه†µم€‚é€ڑè؟‡ه¯¹ن»؟çœں结وœçڑ„هˆ†وگ,能ه¤ںو·±ه…¥ن؛†è§£ç„ٹوژ¥è؟‡ç¨‹ن¸ç†”هŒ–ه’Œه‡ه›؛çڑ„çژ°è±،,ن»ژ而ن¼کهŒ–ç„ٹوژ¥هڈ‚و•°ï¼Œوڈگé«کç„ٹوژ¥è´¨é‡ڈم€‚ 适هگˆن؛؛群ï¼ڑن»ژن؛‹ç„ٹوژ¥ه·¥ç¨‹م€پوگو–™ç§‘ه¦هڈٹ相ه…³é¢†هںںçڑ„ç ”ç©¶ن؛؛ه‘که’Œوٹ€وœ¯ن؛؛ه‘ک,ه°¤ه…¶وک¯ه¯¹TIGç„ٹوژ¥ه·¥è‰؛و„ںه…´è¶£çڑ„ه¦è€…م€‚ ن½؟用هœ؛و™¯هڈٹç›®و ‡ï¼ڑ适用ن؛ژه¸Œوœ›و·±ه…¥ن؛†è§£TIGç„ٹوژ¥è؟‡ç¨‹ه¹¶ه¸Œوœ›é€ڑè؟‡ن»؟çœںو‰‹و®µن¼کهŒ–ç„ٹوژ¥هڈ‚و•°çڑ„ç ”ç©¶ن؛؛ه‘کم€‚ç›®و ‡وک¯é€ڑè؟‡ن»؟çœںو›´ه¥½هœ°çگ†è§£ç”µه¼§è،Œن¸؛,è؟›è€Œو”¹ه–„ç„ٹوژ¥è´¨é‡ڈه’Œو•ˆçژ‡م€‚ ه…¶ن»–说وکژï¼ڑو–‡ن¸è؟کوڈگهˆ°ن؛†ن¸€ن؛›ه®ç”¨وٹ€ه·§ï¼Œه¦‚网و ¼هˆ’هˆ†م€پ边界و،ن»¶è®¾ç½®م€پو±‚解ه™¨é€‰و‹©ç‰و–¹é¢çڑ„و³¨و„ڈن؛‹é،¹ï¼Œن»¥هڈٹه¦‚ن½•ن½؟用ن¸چهگŒè½¯ن»¶ه·¥ه…·ï¼ˆه¦‚MATLABم€پParaView)è؟›è،Œو•°وچ®هڈ¯è§†هŒ–م€‚و¤ه¤–,ه¼؛è°ƒن؛†ه¤ڑè¯è¨€و··هگˆç¼–程çڑ„ن¼کهٹ؟,ه¹¶وڈگن¾›ن؛†ن¸€ن؛›ه¸¸è§پçڑ„调试ه’Œن¼کهŒ–ه»؛è®®م€‚
jenkinsو“چن½œè¯¶udrtyui897t86r5drctvghuiyft
ه¸†è½¯وœ¬هœ°و‰“هچ°وڈ’ن»¶FinePrint 8.0版وœ¬ï¼Œé€‚用ن؛ژFineReport8
ه†…ه®¹و¦‚è¦پï¼ڑوœ¬و–‡è¯¦ç»†ن»‹ç»چن؛†هں؛ن؛ژTMS320F2812 DSPèٹ¯ç‰‡çڑ„ه…‰ن¼ڈه¹¶ç½‘逆هڈکه™¨è®¾è®،و–¹و،ˆï¼Œو¶µç›–ن؛†ن¸»ç”µè·¯و¶و„م€پوژ§هˆ¶ç®—و³•م€پé”پ相çژ¯ه®çژ°م€پçژ¯وµپوٹ‘هˆ¶ç‰ه¤ڑن¸ھه…³é”®وٹ€وœ¯ç‚¹م€‚首ه…ˆï¼Œو–‡ن¸éکگè؟°ن؛†هڈŒç؛§ه¼ڈ结و„çڑ„ن¸»ç”µè·¯è®¾è®،,ه‰چç؛§Boostهچ‡هژ‹ه°†ه…‰ن¼ڈو؟输ه‡؛电هژ‹وڈگهچ‡è‡³ç؛¦600V,هگژç؛§é‡‡ç”¨ن¸‰ç”µه¹³NPCو‹“و‰‘çڑ„IGBTو،¥è؟›è،Œé€†هڈکم€‚وژ¥ç€ï¼Œو·±ه…¥وژ¢è®¨ن؛†و ¸ه؟ƒوژ§هˆ¶ç®—و³•ï¼Œه¦‚电وµپPIè°ƒèٹ‚ه™¨م€پé”پ相çژ¯(SOFGI)م€پçژ¯وµپوٹ‘هˆ¶ç‰ï¼Œه¹¶وڈگن¾›ن؛†è¯¦ç»†çڑ„MATLABن»؟çœںو¨،ه‹ه’ŒDSPن»£ç په®çژ°م€‚و¤ه¤–,è؟ک特هˆ«ه¼؛è°ƒن؛†PWMو»هŒ؛و—¶é—´é…چç½®م€پADC采و ·و—¶ه؛ڈç‰é—®é¢کçڑ„ه®é™…解ه†³و–¹و،ˆم€‚وœ€ç»ˆï¼Œé€ڑè؟‡ه®éھŒéھŒè¯پ,该و–¹و،ˆه®çژ°ن؛†THDه°ڈن؛ژ3%,MPPTو•ˆçژ‡è¾¾98.7%,ه¹¶وœ‰و•ˆé™چن½ژن؛†ه¹¶èپ”çژ¯وµپم€‚ 适هگˆن؛؛群ï¼ڑن»ژن؛‹ه…‰ن¼ڈه¹¶ç½‘逆هڈکه™¨ه¼€هڈ‘çڑ„电هٹ›ç”µهگه·¥ç¨‹ه¸ˆه’Œوٹ€وœ¯ç ”究ن؛؛ه‘کم€‚ ن½؟用هœ؛و™¯هڈٹç›®و ‡ï¼ڑ适用ن؛ژه…‰ن¼ڈه¹¶ç½‘逆هڈکه™¨çڑ„ç ”هڈ‘éک¶و®µï¼Œه¸®هٹ©ه·¥ç¨‹ه¸ˆçگ†è§£ه’Œه®çژ°é«کو•ˆç¨³ه®ڑçڑ„逆هڈکه™¨وژ§هˆ¶ç³»ç»ں,وڈگé«کç³»ç»ںçڑ„و€§èƒ½وŒ‡و ‡ï¼Œه‡ڈه°‘ه¼€هڈ‘è؟‡ç¨‹ن¸ه¸¸è§پçڑ„错误م€‚ ه…¶ن»–说وکژï¼ڑو–‡ن¸وڈگن¾›çڑ„MATLABن»؟çœںو¨،ه‹ه’ŒDSPن»£ç پهڈ¯ن»¥ن½œن¸؛ه®é™…é،¹ç›®ه¼€هڈ‘çڑ„é‡چè¦پهڈ‚考资و–™ï¼Œوœ‰هٹ©ن؛ژ缩çںه¼€هڈ‘ه‘¨وœں,وڈگé«کوˆگهٹںçژ‡م€‚
ه†…ه®¹و¦‚è¦پï¼ڑوœ¬و–‡è¯¦ç»†ن»‹ç»چن؛†ه¦‚ن½•ç»“هگˆé²¸é±¼ن¼کهŒ–ç®—و³•ï¼ˆWOA)ه’Œو·±ه؛¦وپé™گه¦ن¹ وœ؛(DELM)و„ه»؛ه›ه½’预وµ‹و¨،ه‹م€‚首ه…ˆï¼Œو–‡ç« 解é‡ٹن؛†é²¸é±¼ن¼کهŒ–ç®—و³•çڑ„هں؛وœ¬هژںçگ†ï¼Œè؟™وک¯ن¸€ç§چهڈ—ه؛§ه¤´é²¸ç¾¤ن½“ç‹©çŒژè،Œن¸؛هگ¯هڈ‘çڑ„ه…ƒهگ¯هڈ‘ه¼ڈن¼کهŒ–ç®—و³•م€‚وژ¥ç€ï¼Œéکگè؟°ن؛†و·±ه؛¦وپé™گه¦ن¹ وœ؛çڑ„ه·¥ن½œوœ؛هˆ¶ï¼Œه®ƒç»“هگˆن؛†وپé™گه¦ن¹ وœ؛çڑ„ه؟«é€ںه¦ن¹ 能هٹ›ه’Œو·±ه؛¦ه¦ن¹ çڑ„ه±‚و¬،结و„م€‚éڑڈهگژ,و–‡ç« ه±•ç¤؛ن؛†ه¦‚ن½•ن½؟用و—¶é—´çھ—و³•ه¤„çگ†و•°وچ®ï¼Œه¹¶و„ه»؛è‡ھهٹ¨ç¼–ç په™¨ه’Œوپé™گه¦ن¹ وœ؛çڑ„ه…·ن½“و¥éھ¤م€‚特هˆ«هœ°ï¼Œو–‡ن¸è¯¦ç»†وڈڈè؟°ن؛†ه¦‚ن½•هˆ©ç”¨é²¸é±¼ن¼کهŒ–ç®—و³•ن¼کهŒ–è‡ھهٹ¨ç¼–ç په™¨çڑ„输ه…¥وƒé‡چن¸ژهپڈ置,ن»ژ而وڈگé«کو¨،ه‹çڑ„预وµ‹و€§èƒ½م€‚وœ€هگژ,给ه‡؛ن؛†ه®Œو•´çڑ„ن»£ç په®çژ°ï¼ŒهŒ…و‹¬و•°وچ®é¢„ه¤„çگ†م€پو¨،ه‹و„ه»؛م€پن¼کهŒ–ه’Œé¢„وµ‹ç‰çژ¯èٹ‚م€‚ 适هگˆن؛؛群ï¼ڑه…·ه¤‡ن¸€ه®ڑوœ؛ه™¨ه¦ن¹ هں؛ç،€çڑ„ç ”ç©¶ن؛؛ه‘که’Œوٹ€وœ¯ه¼€هڈ‘者,ه°¤ه…¶وک¯ه¯¹و—¶é—´ه؛ڈهˆ—预وµ‹و„ںه…´è¶£çڑ„ن»ژن¸ڑ者م€‚ ن½؟用هœ؛و™¯هڈٹç›®و ‡ï¼ڑ适用ن؛ژ需è¦پé«کç²¾ه؛¦ه›ه½’预وµ‹çڑ„ن»»هٹ،,ه¦‚金èچو•°وچ®هˆ†وگم€پ能و؛گو¶ˆè€—预وµ‹ç‰é¢†هںںم€‚ن¸»è¦پç›®و ‡وک¯é€ڑè؟‡ن¼کهŒ–و¨،ه‹هڈ‚و•°ï¼Œوڈگé«ک预وµ‹çڑ„ه‡†ç،®و€§م€‚ ه…¶ن»–说وکژï¼ڑوœ¬و–‡وڈگن¾›çڑ„ن»£ç پç¤؛ن¾‹è¯¦ه°½ن¸”وک“ن؛ژن؟®و”¹ï¼Œç”¨وˆ·هڈھ需و›؟وچ¢è‡ھه·±çڑ„و•°وچ®è·¯ه¾„هچ³هڈ¯ه¤چçژ°ه®éھŒç»“وœم€‚هگŒو—¶ï¼Œو–‡ن¸è؟کوڈگن¾›ن؛†è°ƒهڈ‚çڑ„ه°ڈوٹ€ه·§ï¼Œوœ‰هٹ©ن؛ژè؟›ن¸€و¥وڈگهچ‡و¨،ه‹è،¨çژ°م€‚
ه†…ه®¹و¦‚è¦پï¼ڑT/CIN 029—2024و ‡ه‡†è§„ه®ڑن؛†é船载ن¼ ه¯¼ه¼ڈه……电وœ؛ن¸ژ电هٹ¨èˆ¹èˆ¶ن¹‹é—´çڑ„و•°ه—é€ڑن؟،هچڈ议,و¶µç›–ن؛†ن¸€èˆ¬è¦پو±‚م€پé€ڑن؟،物çگ†ه±‚م€پو•°وچ®é“¾è·¯ه±‚م€په؛”用ه±‚م€په……电و€»ن½“وµپ程م€پوٹ¥و–‡هˆ†ç±»م€پو ¼ه¼ڈه’Œه†…ه®¹ç‰و–¹é¢م€‚该و ‡ه‡†و—¨هœ¨ç،®ن؟电هٹ¨èˆ¹èˆ¶è؟وژ¥هˆ°ç›´وµپ电网و—¶ï¼Œه……电وœ؛ن¸ژ电و± ç®،çگ†ç³»ç»ں(BMS)وˆ–船舶ç®،çگ†ç³»ç»ں(SMS)ن¹‹é—´çڑ„稳ه®ڑé€ڑن؟،م€‚و ‡ه‡†è¯¦ç»†ه®ڑن¹‰ن؛†هگ„ه±‚çڑ„é€ڑن؟،è¦پو±‚,ه¦‚物çگ†ه±‚çڑ„ISO 11898-1ه’ŒSAE J1939-11规范,و•°وچ®é“¾è·¯ه±‚çڑ„CANو‰©ه±•ه¸§و ¼ه¼ڈ,ن»¥هڈٹه؛”用ه±‚çڑ„هڈ‚و•°ç»„ç¼–هڈ·ه’Œن¼ 输هچڈè®®م€‚و¤ه¤–,è؟ک详细وڈڈè؟°ن؛†ه……电çڑ„ه…ن¸ھéک¶و®µï¼ˆç‰©çگ†è؟وژ¥م€پن½ژهژ‹è¾…هٹ©ن¸ٹ电م€په……电وڈ،و‰‹م€پهڈ‚و•°é…چç½®م€په……电ه’Œç»“وں)çڑ„ه…·ن½“وµپ程ه’Œو¶‰هڈٹçڑ„وٹ¥و–‡و ¼ه¼ڈ,ç،®ن؟ن؛†ه……电è؟‡ç¨‹çڑ„ه®‰ه…¨و€§ه’Œهڈ¯é و€§م€‚ 适用ن؛؛群ï¼ڑن»ژن؛‹ç”µهٹ¨èˆ¹èˆ¶ه……电系ç»ں设è®،م€په¼€هڈ‘م€پç»´وٹ¤çڑ„وٹ€وœ¯ن؛؛ه‘کهڈٹه·¥ç¨‹ه¸ˆï¼›ç›¸ه…³è،Œن¸ڑçڑ„ç ”ç©¶ن؛؛ه‘کï¼›ه¯¹ç”µهٹ¨èˆ¹èˆ¶ه……电é€ڑن؟،هچڈè®®و„ںه…´è¶£çڑ„ه¦è€…ه’Œن¸“ن¸ڑن؛؛ه£«م€‚ ن½؟用هœ؛و™¯هڈٹç›®و ‡ï¼ڑâ‘ ن¸؛电هٹ¨èˆ¹èˆ¶ه……电系ç»ںçڑ„ه¼€هڈ‘ه’Œن¼کهŒ–وڈگن¾›وٹ€وœ¯ن¾وچ®ï¼›â‘، ç،®ن؟ه……电وœ؛ن¸ژBMS/SMSن¹‹é—´çڑ„é«کو•ˆم€پهڈ¯é é€ڑن؟،;③ ن؟éڑœه……电è؟‡ç¨‹çڑ„ه®‰ه…¨و€§ه’Œç¨³ه®ڑو€§ï¼Œéک²و¢ه› é€ڑن؟،و•…éڑœه¯¼è‡´çڑ„ه……电ن¸و–وˆ–ن؛‹و•…م€‚ ه…¶ن»–说وکژï¼ڑوœ¬و ‡ه‡†ç”±ن¸ه›½èˆھوµ·ه¦ن¼ڑهڈ‘ه¸ƒï¼Œé€‚用ن؛ژ电هٹ¨èˆ¹èˆ¶è؟وژ¥هˆ°ç›´وµپ电网و—¶çڑ„ه……电é€ڑن؟،,ن¸؛电هٹ¨èˆ¹èˆ¶è،Œن¸ڑçڑ„و ‡ه‡†هŒ–هڈ‘ه±•وڈگن¾›ن؛†é‡چè¦پو”¯وŒپم€‚و ‡ه‡†ن¸è؟کهŒ…هگ«ن؛†è¯¦ç»†çڑ„و•…éڑœè¯ٹو–ن»£ç په’Œوٹ¥و–‡و ¼ه¼ڈ,ه¸®هٹ©وٹ€وœ¯ن؛؛ه‘که؟«é€ںه®ڑن½چه’Œè§£ه†³é—®é¢کم€‚
vue هں؛ç،€è¯و³•ن½؟用ه؟ƒه¾—
و ¹وچ®â€œو„ڈè§پâ€هˆ›و–°é“¶هڈ‘ç»ڈوµژو–°و¨،ه¼ڈ.pptx
ه†…ه®¹و¦‚è¦پï¼ڑوœ¬و–‡è¯¦ç»†ن»‹ç»چن؛†ç”¨ن؛ژوœ؛و¢°و•…éڑœè¯ٹو–çڑ„盲هڈچهچ·ç§¯و–¹و³•هڈٹه…¶ه‘¨وœںن¼°è®،وٹ€وœ¯م€‚首ه…ˆوژ¢è®¨ن؛†هˆ©ç”¨è‡ھ相ه…³ه‡½و•°ه’ŒهŒ…络è°گو³¢ن¹ک积谱(EHPS)è؟›è،Œه‘¨وœںن¼°è®،çڑ„و–¹و³•ï¼Œوڈگن¾›ن؛†ه…·ن½“çڑ„MATLABن»£ç په®çژ°م€‚وژ¥ç€éکگè؟°ن؛†ه¦‚ن½•ه°†è؟™ن¸¤ç§چو–¹و³•é›†وˆگهˆ°ç›²هڈچهچ·ç§¯و،†و¶ï¼ˆه¦‚MCKDه’ŒCYCBD)ن¸ï¼Œه½¢وˆگè؟ن»£ن¼کهŒ–çڑ„解ه†³و–¹و،ˆم€‚و–‡ن¸é€ڑè؟‡ه¤ڑن¸ھه®é™…و،ˆن¾‹ه±•ç¤؛ن؛†è؟™ن؛›و–¹و³•çڑ„وœ‰و•ˆو€§ه’Œن¼کè¶ٹو€§ï¼Œه°¤ه…¶وک¯هœ¨è½¬é€ںو³¢هٹ¨è¾ƒه¤§وƒ…ه†µن¸‹ï¼Œèƒ½ه¤ںوک¾è‘—وڈگé«کو•…éڑœè¯†هˆ«çژ‡ه¹¶ه‡ڈه°‘è®،ç®—و—¶é—´م€‚ 适هگˆن؛؛群ï¼ڑن»ژن؛‹وœ؛و¢°è®¾ه¤‡çٹ¶و€پ监وµ‹ن¸ژو•…éڑœè¯ٹو–çڑ„ç ”ç©¶ن؛؛ه‘که’Œوٹ€وœ¯ن؛؛ه‘ک,ه°¤ه…¶وک¯وœ‰ن¸€ه®ڑMATLAB编程هں؛ç،€çڑ„ه·¥ç¨‹ه¸ˆم€‚ ن½؟用هœ؛و™¯هڈٹç›®و ‡ï¼ڑ适用ن؛ژهگ„ç§چو—‹è½¬وœ؛و¢°è®¾ه¤‡ï¼ˆه¦‚é£ژهٹ›هڈ‘电وœ؛م€پهژ‹ç¼©وœ؛م€پé½؟轮箱ç‰ï¼‰çڑ„çٹ¶و€پ监وµ‹ه’Œو•…éڑœè¯ٹو–م€‚ن¸»è¦پç›®و ‡وک¯هœ¨ç¼؛ن¹ڈç²¾ç،®è½¬é€ںن؟،وپ¯çڑ„وƒ…ه†µن¸‹ï¼Œé€ڑè؟‡ç›²هڈچهچ·ç§¯وٹ€وœ¯ه’Œه‘¨وœںن¼°è®،و–¹و³•ï¼Œن»ژه¤چو‚背و™¯ه™ھه£°ن¸وڈگهڈ–ه‡؛وœ‰ç”¨çڑ„و•…éڑœç‰¹ه¾پن؟،هڈ·ï¼Œن»ژ而ه®çژ°é«کو•ˆç²¾ه‡†çڑ„و•…éڑœو£€وµ‹م€‚ ه…¶ن»–说وکژï¼ڑو–‡ن¸ن¸چن»…وڈگن¾›ن؛†è¯¦ç»†çڑ„çگ†è®؛解é‡ٹه’Œوٹ€وœ¯ه®çژ°و¥éھ¤ï¼Œè؟کهŒ…و‹¬ن؛†è®¸ه¤ڑه®ç”¨çڑ„ç»ڈéھŒوٹ€ه·§ï¼Œه¦‚هڈ‚و•°é€‰و‹©م€پç®—و³•ن¼کهŒ–ç‰و–¹é¢çڑ„ه†…ه®¹م€‚و¤ه¤–,ن½œè€…è؟که¼؛è°ƒن؛†ن¸چهگŒو–¹و³•ن¹‹é—´çڑ„ن؛’è،¥و€§ه’Œç»„هگˆن½؟用çڑ„ه؟…è¦پو€§ï¼Œن¸؛读者وڈگن¾›ن؛†ن¸€ن¸ھه®Œو•´çڑ„解ه†³و–¹و،ˆè§†è§’م€‚
腰髋疼痛هŒ»و،ˆè§£وگن¸ژç»ڈه…¸ه¦ن¹ .pptx
该资و؛گن¸؛scipy-0.12.0.tar.gz,و¬¢è؟ژن¸‹è½½ن½؟用ه“¦ï¼پ
用Pythonه¼€هڈ‘çڑ„爬هڈ–ن؛Œو‰‹è½¦ç½‘ç«™و•°وچ®هڈٹه…¶هˆ†وگçڑ„程ه؛ڈ,爬هڈ–çڑ„و—¶ه€™é‡‡ç”¨selenium驱هٹ¨googleوµڈ览ه™¨è؟›è،Œو•°وچ®çڑ„وٹ“هڈ–,وٹ“هڈ–çڑ„网é،µه†…ه®¹ن¼ ه…¥lxmlو¨،ه—çڑ„etreeه¯¹è±،HTMLو–¹و³•é€ڑè؟‡xpath解وگDOMو ‘,ن¸چè؟‡ن؛Œو‰‹è½¦çڑ„ه…³é”®و•°وچ®و¯”ه¦‚ن؛Œو‰‹è½¦ن»·و ¼ï¼Œو±½è½¦è،¨وک¾é‡Œç¨‹و•°ه—采用ن؛†ه—ن½“و–‡ن»¶هٹ ه¯†م€‚وچ®çڑ„ه±•ç¤؛采用pyecharts,ه®ƒوک¯ن¸€ن¸ھ用ن؛ژç”ںوˆگ Echarts ه›¾è،¨çڑ„ç±»ه؛“م€‚爬هڈ–çڑ„و•°وچ®وڈ’ه…¥mysqlو•°وچ®ه؛“ه’Œهˆ†وگو•°وچ®è¯»هڈ–mysqlو•°وچ®ه؛“è،¨éƒ½وک¯é€ڑè؟‡pymysqlو¨،ه—و“چن½œم€‚
“Clerk Exam resultâ€و•°وچ®é›†وک¯ه…³ن؛ژèپŒه‘ک考试结وœçڑ„集هگˆï¼Œه®ƒن¸؛ç ”ç©¶èپŒه‘کو‹›èپکن¸ژ选و‹”وڈگن¾›ن؛†ن¸°ه¯Œçڑ„و•°وچ®èµ„و؛گم€‚该و•°وچ®é›†هڈ¯èƒ½هŒ…هگ«ن؛†ن¼—ه¤ڑ考ç”ںçڑ„هں؛وœ¬ن؟،وپ¯ï¼Œه¦‚ه§“هگچم€پو€§هˆ«م€په¹´é¾„م€په¦هژ†ç‰ï¼Œè؟™ن؛›ن؟،وپ¯وœ‰هٹ©ن؛ژهˆ†وگن¸چهگŒèƒŒو™¯è€ƒç”ںçڑ„考试è،¨çژ°ه·®ه¼‚م€‚考试وˆگ绩وک¯و•°وچ®é›†çڑ„و ¸ه؟ƒéƒ¨هˆ†ï¼Œه®ƒهڈ¯èƒ½و¶µç›–ن؛†ç¬”试م€پé¢è¯•ç‰ه¤ڑن¸ھçژ¯èٹ‚çڑ„هˆ†و•°ï¼Œé€ڑè؟‡è؟™ن؛›هˆ†و•°هڈ¯ن»¥ç›´è§‚هœ°çœ‹ه‡؛考ç”ںهœ¨ن¸“ن¸ڑçں¥è¯†م€پ综هگˆèƒ½هٹ›ç‰و–¹é¢çڑ„وژŒوڈ،程ه؛¦م€‚و¤ه¤–,و•°وچ®é›†è؟کهڈ¯èƒ½و ‡و³¨ن؛†è€ƒç”ںوک¯هگ¦é€ڑè؟‡è€ƒè¯•ï¼Œè؟™ن¸؛ç ”ç©¶è€ƒè¯•çڑ„选و‹”و ‡ه‡†ه’Œé€ڑè؟‡çژ‡وڈگن¾›ن؛†ن¾وچ®م€‚ ن»ژو•°وچ®çڑ„و¥و؛گو¥çœ‹ï¼Œه®ƒهڈ¯èƒ½وک¯ç”±وںگن¸ھوˆ–ه¤ڑن¸ھ组织هœ¨è؟›è،ŒèپŒه‘کو‹›èپک考试هگژو•´çگ†è€Œوˆگ,ه…·وœ‰ن¸€ه®ڑçڑ„وƒه¨پو€§ه’Œه®ç”¨و€§م€‚é€ڑè؟‡ه¯¹è¯¥و•°وچ®é›†çڑ„هˆ†وگ,هڈ¯ن»¥هڈ‘çژ°è€ƒè¯•è؟‡ç¨‹ن¸هکهœ¨çڑ„é—®é¢ک,و¯”ه¦‚وںگن؛›é¢کç›®çڑ„éڑ¾ه؛¦وک¯هگ¦è؟‡é«کوˆ–è؟‡ن½ژ,ن»¥هڈٹن¸چهگŒهœ°هŒ؛م€پن¸چهگŒه²—ن½چçڑ„考试éڑ¾ه؛¦وک¯هگ¦ه‡è،،ç‰م€‚هگŒو—¶ï¼Œه®ƒن¹ں能ن¸؛هگژç»çڑ„و‹›èپک考试وڈگن¾›هڈ‚考,ه¸®هٹ©ن¼کهŒ–考试وµپ程ه’Œه†…ه®¹ï¼Œوڈگé«کو‹›èپکçڑ„科ه¦و€§ه’Œوœ‰و•ˆو€§م€‚ 然而,需è¦پو³¨و„ڈçڑ„وک¯ï¼Œو¤ç±»و•°وچ®é›†هڈ¯èƒ½و¶‰هڈٹ考ç”ںçڑ„éڑگç§پن؟،وپ¯ï¼Œه› و¤هœ¨ن½؟用و—¶ه؟…é،»ن¸¥و ¼éپµه®ˆç›¸ه…³و³•ه¾‹و³•è§„,ç،®ن؟و•°وچ®çڑ„ه®‰ه…¨ه’Œهگˆو³•ن½؟用م€‚هگŒو—¶ï¼Œç”±ن؛ژ考试ه†…ه®¹ه’Œو ‡ه‡†هڈ¯èƒ½ن¼ڑéڑڈç€و—¶é—´م€پهœ°هŒ؛ه’Œه²—ن½چçڑ„ن¸چهگŒè€Œوœ‰و‰€هڈکهŒ–,ه› و¤هœ¨هˆ†وگو•°وچ®و—¶ن¹ں需è¦پ考虑هˆ°è؟™ن؛›ه› ç´ ï¼Œéپ؟ه…چه¾—ه‡؛片é¢وˆ–ن¸چه‡†ç،®çڑ„结è®؛م€‚
ه†…ه®¹و¦‚è¦پï¼ڑوœ¬و–‡è¯¦ç»†ن»‹ç»چن؛†هں؛ن؛ژMatlab/Simulinkه¹³هڈ°çڑ„5MWوµ·ن¸ٹو°¸ç£پ直驱é£ژ电系ç»ںهڈٹه…¶1200Vه¹¶ç½‘ه؛”用م€‚و–‡ç« 首ه…ˆéکگè؟°ن؛†ç³»ç»ںçڑ„و•´ن½“و¶و„,هŒ…و‹¬وœ؛ن¾§هڈکوµپه™¨çڑ„çں¢é‡ڈوژ§هˆ¶ه’Œç½‘ن¾§هڈکوµپه™¨çڑ„ç›´وµپ电هژ‹ه¤–çژ¯+电网电هژ‹ه®ڑهگ‘وژ§هˆ¶م€‚特هˆ«ه¼؛è°ƒن؛†و»‘هٹ¨ه¹³ه‡و»¤و³¢هœ¨هٹںçژ‡هˆ†é…چن¸çڑ„ه؛”用,ن»¥هڈٹو··هگˆه‚¨èƒ½ç³»ç»ں(超ç؛§ç”µه®¹ه’Œé”‚电و± )çڑ„设è®،ن¸ژن¼کهŒ–م€‚و–‡ن¸è؟ک讨è®؛ن؛†ه…³é”®هڈ‚و•°çڑ„选و‹©ن¾وچ®ï¼Œه¦‚PIهڈ‚و•°و•´ه®ڑم€پPLLو¨،ه—هڈ‚و•°è®¾ç½®ç‰ï¼Œه¹¶ه±•ç¤؛ن؛†ن»؟çœںè؟‡ç¨‹ن¸éپ‡هˆ°çڑ„é—®é¢کهڈٹ解ه†³و–¹و،ˆم€‚و¤ه¤–,و–‡ç« هˆ†ن؛«ن؛†é£ژé€ںو•°وچ®ه¤„çگ†و–¹و³•م€پو•…éڑœç©؟è¶ٹو€§èƒ½وµ‹è¯•ç»“وœن»¥هڈٹو¨،ه‹çڑ„ه®é™…ه؛”用وƒ…ه†µم€‚ 适هگˆن؛؛群ï¼ڑن»ژن؛‹é£ژ电系ç»ں设è®،م€پوژ§هˆ¶ه·¥ç¨‹م€پ电هٹ›ç”µهگ领هںںçڑ„ç ”ç©¶ن؛؛ه‘که’Œوٹ€وœ¯ن؛؛ه‘کم€‚ ن½؟用هœ؛و™¯هڈٹç›®و ‡ï¼ڑ适用ن؛ژه¸Œوœ›و·±ه…¥ن؛†è§£وµ·ن¸ٹé£ژ电系ç»ںوژ§هˆ¶ç–ç•¥çڑ„ç ”ç©¶ن؛؛ه‘که’Œوٹ€وœ¯ن؛؛ه‘ک,و—¨هœ¨وڈگé«که¯¹ç›´é©±و°¸ç£پé£ژ电系ç»ںçڑ„çگ†è§£ه’ŒوژŒوڈ،,特هˆ«وک¯هœ¨ه¤چو‚ه·¥ه†µن¸‹çڑ„稳ه®ڑو€§ه’Œو•ˆçژ‡ن¼کهŒ–و–¹é¢م€‚ ه…¶ن»–说وکژï¼ڑو–‡ç« وڈگن¾›ن؛†è¯¦ç»†çڑ„ن»£ç پ片و®µه’Œن»؟çœں结وœï¼Œن¾؟ن؛ژ读者ه¤چçژ°ه®éھŒه¹¶è؟›è،Œè؟›ن¸€و¥ç ”究م€‚هگŒو—¶ï¼Œن½œè€…وڈگهˆ°ن؛†ن¸€ن؛›ه®ç”¨çڑ„ç»ڈéھŒه’Œوٹ€ه·§ï¼Œوœ‰هٹ©ن؛ژ解ه†³ه®é™…é،¹ç›®ن¸هڈ¯èƒ½éپ‡هˆ°çڑ„وٹ€وœ¯éڑ¾é¢کم€‚