- ÌçÒÏ: 288279 ̘À
- ÌÏͨ:

- ÌËÒˆ: ÌçÍ
-

ÌÓ¨ ÍÓÝ£
ÓʃͤÓÍ
- ÌÓÒçÒÛ₤ ( 0)
- ÌÓÒÛ¤Í ( 0)
- ÌÓÕÛÓÙ ( 0)
ÍÙÌÀÈÍÓÝ£
- 2014-06 ( 1)
- 2014-02 ( 2)
- 2013-12 ( 4)
- ÌÇÍÊÍÙÌÀÈ...
Ì̯Ò₤ÒÛ¤
-
biglinvyÿ¥
ÕÀÑÕÀÑÕÀÑ
ScrollView scrollTo Óð§¢Ó´ Í´Ó£ÌÌ
ÐOpenCVÐÒƒ¿Ó¥ÌÈÌçÿ¥SobelÐÌÌÛÌÌ₤ÓÛÍÙ
- ÍÍÛÂÍÓÝ£ÿ¥
- ÍÒ§Îð¿ÕÇ(Ò§˜Ò§§)
- androidÍÙÎð¿
Òƒ¿Ó¥
Òƒ¿Ó¥(edge)Ì₤Ì̓ÍÍÝÕ´Í¥¤Í¤ÎÍÍÌ̃ÒÓÕ´ÍÐð¡£ÒÎÍÙÍ´ð¤ÓÛÌ ð¡ÓÛÌ ÐÓÛÌ ð¡ÒÌ₤ÐͤÍð¡Í¤Í(Í Ì˜ð¡ÍÒýͧˋ)ð¿ÕÇÿ¥Ì₤̓ÍÍÍýÐÓ¤¿Óӿ̓ÍͧÂÓÑӿ̓ÓÙ̓ÍÍÌÓÕÒÎͤÓÀÐ
̓ÍÍ¥¤Í¤ÎÓ̃ÒÍÍÍ₤Íð¡¤ÿ¥
- ÕÑÒñÍÍ̯ͧÿ¥Í°ÍƒÍÍ¥¤Í¤ÎÍ´ð¡Ò¢Ó£ÙÍÊÓð¡ÊÒƒ¿ÓÍÓÇ Ó¯Í¤ÎÍ¥ÌÓ̃ÒÓÍñÛÍ¥ÿ¥
- Ó¤¢ÌÀÿ¥ÍÝÕÀÑÿ¥ÍÍ̯ͧÿ¥Í°ÍƒÍÍ¥¤Í¤ÎÓˆÓÑð£ð¡ð¡ˆÍ¥ÍÍͯÍÎð¡ð¡ˆÍ¥ÿ¥ð¢Ìð¡ÒƒÍ¯ÒÀÓ´ÍÍÍͯÍÌËÓÍ¥Ð
̓ÍÓÒƒ¿Ó¥ÌÌ¿ÍÍÍ¿ ͤÎð¡Êð¡ˆÍÝÌÏ,Ìý¢Òƒ¿Ó¥Ì¿ÍÍÓÇ ÍÍÍ¿°Ó¥,ÍÓÇð¤Òƒ¿Ó¥Ì¿ÍÍÓÇ ÍÍÍÏÓ.Òƒ¿Ó¥ð¡ÓÒ¢ÓÏÍÍÍ₤ð£ËӴ̓ÛÍÓÛÍÙÌÈÌçͤÌË,ÕÍ¡¡Ó´ð¡ÕÑÌð¤ÕÑÍ₤¥Ì¯ÌËÌÈÌçÒƒ¿Ó¥Ð

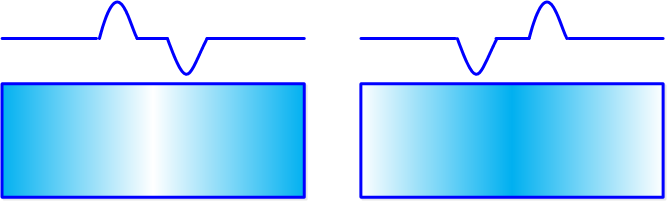
ÿ¥aÿ¥ÿ¥bÿ¥ÍͨÌ₤ÕÑÒñ̯ͧÍÍÝÕÀÑ̯ͧÓð¤Ó£Ç̓Íÿ¥ÿ¥cÿ¥ÿ¥dÿ¥Ì₤ÕÑÒñÍÍÝÕÀÑ̯ͧÓ̯ͧ̓ÒÝÀÿ¥ÿ¥eÿ¥ÿ¥fÿ¥Í₤¿Í¤ð¡ÕÑÍ̯ÿ¥ÿ¥gÿ¥ÿ¥hÿ¥Ì₤ð¤ÕÑÍ̯Ð
ô
ð¡ÕÑÍ₤¥Ì¯Ì°ÿ¥ÌÂ₤ͤÎÓÛÍÙ
Í₤¿ð¤ÍñÎ̓ÿ¥ÍñÎðƒÏÓÒƒ¿Ì₤ÌÙÈÓÿ¥ÓÝÌͯð¤Ûÿ¥ÿ¥Í°ðƒÏÓÒƒ¿Ì₤ÒÇÓÿ¥ÓÝð¤ÛͯÌÿ¥ÐÍ₤¿ð¤Í°Íƒÿ¥Ó£ÒÛ¤Ó¡ÍÐÍ¡¡Ì¯Õ´Íð¡¤ÕÑÐÓ´ÌËÌÈÌçÒƒ¿Ì₤ÍÎÍÙÍ´Ð
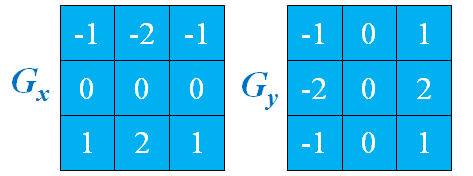
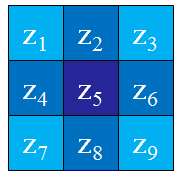
ÌÂ₤ͤÎÓÛÍÙ Gradient operators
̯ͧf(x,y)Í´(x,y)ÍÊÓÌÂ₤ͤÎð¡¤ð¡ð¡ˆÍÕÿ¥
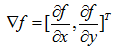
ÒÛÀÓÛÒ¢ð¡ˆÍÕÓÍÊÏͯð¡¤ÿ¥

Ò¢ð¥¥ð¡¤:
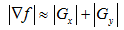
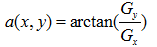
ÌÂ₤ͤÎÓÌ¿ÍÒÏð¡¤ÿ¥
ô
SobelÓÛÍÙ
sobelÓÛÍÙÓÒÀ´Óʤÿ¥

ô
ÌÂ₤ͤÎÍ¿ Í¥ÿ¥
Ó´ÍñÓÏ₤Ì´ÀÌ¢ÌËÍÛÓ¯ÿ¥
ÐÓ¡Í °ð£ÈÓ Ð
ÌËÍÈ
CV_EXPORTS_W void Sobel( InputArray src, OutputArray dst, int ddepth,
int dx, int dy, int ksize=3,
double scale=1, double delta=0,
int borderType=BORDER_DEFAULT );
ð§¢Ó´
/////////////////////////// Sobe l//////////////////////////////////// /// Generate grad_x and grad_y Mat grad_x, grad_y; Mat abs_grad_x, abs_grad_y; /// Gradient X //Scharr( src_gray, grad_x, ddepth, 1, 0, scale, delta, BORDER_DEFAULT ); //Calculates the first, second, third, or mixed image derivatives using an extended Sobel operator. Sobel( src_gray, grad_x, ddepth, 1, 0, 3, scale, delta, BORDER_DEFAULT ); convertScaleAbs( grad_x, abs_grad_x ); /// Gradient Y //Scharr( src_gray, grad_y, ddepth, 0, 1, scale, delta, BORDER_DEFAULT ); Sobel( src_gray, grad_y, ddepth, 0, 1, 3, scale, delta, BORDER_DEFAULT ); convertScaleAbs( grad_y, abs_grad_y ); /// Total Gradient (approximate) addWeighted( abs_grad_x, 0.5, abs_grad_y, 0.5, 0, grad );
ð¤ÕÑ̓ÛÍÌ°ÿ¥ÌÌÛÌÌ₤
ð¤ÕÑ̓ÛÍÍ´ð¤ÛÓð¡Òƒ¿Ì₤ÒÇÓÿ¥Í´ÌÓð¡Òƒ¿Ì₤ÌÙÈÓÐÍ¡¡Ì¯Õ´Íð¡¤ÕÑÐÍ₤ð£ËÓ´ÌËÓÀÛÍÛÒƒ¿ÓÍÓÀÛð§Ó§Ûÿ¥ð£ËÍÍÓÇ Í´ð¤ÛÓð¡ðƒÏÒ¢Ì₤ÌÓð¡ðƒÏÐ

LapLace ÌÌÛÌÌ₤ÓÛÍÙ
ð¤Ó£Ç̯ͧf(x,y)ÓÌÌÛÌÌ₤Ì₤ð¡ð¡ˆð¤ÕÑÓ̓ÛÍÿ¥ÍÛð¿ð¡¤ÿ¥
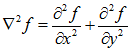
Í Ñð¡Ùÿ¥
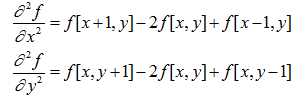
Í₤ð£ËÓ´ÍÊÓÏÌ¿Í¥Í¯Í ÑÒÀ´Óʤð¡¤Ì¯ÍÙͧÂÍ¥ÐÍ₤¿ð¤ð¡ð¡ˆ3*3ÓͤÍÿ¥Ó£Õˆð¡Ò¨̴ÒÌÍÊÓͧÂÍ¥Ì₤ÿ¥

ÍÛð¿Ì¯ÍÙͧÂÍ¥ÓÌÌÛÌÌ₤ÒÎÌÝÓ°£Ì¯ð¿ÍÍ¢ ð¡¤0
ô
ÐÓ¡Í °ð£ÈÓ Ð
ÌËÍÈ
CV_EXPORTS_W void Laplacian( InputArray src, OutputArray dst, int ddepth,
int ksize=1, double scale=1, double delta=0,
int borderType=BORDER_DEFAULT );
ð§¢Ó´
Mat abs_dst,dst; int scale = 1; int delta = 0; int ddepth = CV_16S; int kernel_size = 3; Laplacian( src_gray, dst, ddepth, kernel_size, scale, delta, BORDER_DEFAULT ); convertScaleAbs( dst, abs_dst ); namedWindow( window_name2, CV_WINDOW_AUTOSIZE );
ÍÛÒñçÌÌ
Í̓

Ì°´Ìÿ¥Òƒ¿Ó¥ÌÈÌçÍ₤¿ÍˆÍȯÌ₤ÒƒÌÌÿ¥ÕÒÎÍ Ó´Õ¨Ì₤Ì£ÊÌ°ÂÍ´Í₤¿ÍƒÍÒ¢ÒÀÍ¿°Ì£ÐÍÒÍÌÿ¥ÐOpenCVÐÕ£ÍÌ£ÊÌ°Âÿ¥Ì¿ÌÀÐÕ¨Ì₤Ðð¡ÙÍ¥ÐÍÒƒ¿Ì£ÊÌ°Â
Sobel Òƒ¿Ó¥ÌÈÌç
SobelÓÛÍÙÍ₤ð£ËÓÇÌËÒÛÀÓÛGx ÐGyÍ₤ð£ËÌÈÌçͯ҃¿ÓÍÙÍ´ÿ¥ð£ËÍð£Ìͯð¤Ûÿ¥ð£ð¤ÛͯÌÓÍÍÐð£ ÒÛÀÓÛ| Gx |ÿ¥ð¤ÏÓÌÍ¥¤ÓÍͤÌ₤ÌÙÈð¤Êð¤xÒ§ÇÓÒƒ¿ÿ¥ | Gy |ÍÌ₤ÌÙÈð¤Êð¤yÒ§ÇÓÒƒ¿Ð
ô
LaplaceÒƒ¿Ó¥ÌÈÌç
ÌÌÛÌÌ₤Í₤¿ÍˆÍȯÌÌÿ¥ð¥ð¤ÏÓÍÒƒ¿ÌÌÐð¡Ò§ÌÈÌçͤ҃¿ÓÌ¿ÍÐÕÍ¡¡ð¡ÓÇÌËÓ´ð¤Òƒ¿ÓÌÈÌçÿ¥ÍˆÒçñÒƒ ÍˋÓÒÏÒýÿ¥ÌÈÌçð¡ð¡ˆÍÓÇ Ì₤Í´Òƒ¿Óð¤ÛÓð¡Òƒ¿Ò¢Ì₤ÌÓð¡Òƒ¿ÍˋÓ´ÕÑÒñ´ÒÑÿ¥ÓÀÛÍÛÒƒ¿Óð§Ó§ÛÐ
Ò§˜Ò§§Ò₤ñÌ°´ÌͤÍÊÿ¥http://blog.csdn.net/xiaowei_cqu/article/details/7829481
ÍÛÕˆð£ÈÓ ð¡Ò§§ÿ¥http://download.csdn.net/detail/xiaowei_cqu/4475976
ô


- 2012-08-04 13:41
- ÌçÒÏ 1576
- Ò₤ÒÛ¤(0)
- ÍÓÝ£:ÓϣʹͥÍ
- ÌËÓÌÇÍÊ
ÍÒÀ´Ò₤ÒÛ¤

-
unityͤÓÀÍ¥Í----Óˋð§ð§ÓÏ£ÍÌÒ§˜ÍÛÓ´ð£ÈÓ
2013-11-21 22:46 1282using UnityEngine; using Syst ... -
android Í´ÌÌÑÕ Õ̤Ó
2013-09-24 12:03 1355ô ô ÒˆÍÛð¿ViewÍÛÒñç ðƒÍÙð£ÈÓ ÒˆÍÛð¿Í´ÌÌÑÕ ... -
android Dialog ÒÌ₤ÕÛÕÂ
2013-08-14 11:22 1215ô ô ô ô Ìð£˜Í´ð§¢Ó´ÒˆÍÛð¿ÓDialogÓÌÑÍÿ¥Í̘ÂÒˆÍñÝ ... -
ScrollView scrollTo Óð§¢Ó´ Í´Ó£ÌÌ
2013-08-05 17:43 4648ô ô ð£ÍÊˋӴͯð¤ScrollView scrollToÌ¿Ì° ... -
Androidð¡ÙViewÓ£ÍÑð¥Íð¿ð¡---- ð¥ÍÍ¡ÍÝÍÝ̘À
2012-09-04 23:00 1107ô ô ô ... -
Androidð¡ÙViewÓ£ÍÑð¥Íð¤ð¡---- ð§¢Ó´<include />Ì ÓÙƒÍÊÓ´Í¡ÍÝÌð£Ñ
2012-09-08 13:54 1077ô ... -
Androidð¡ÙViewÓ£ÍÑð¥Íð¿ð¡---- ð¥ÍView
2012-09-13 21:00 1098ô ... -
Í ¯Ìð££ÍÀÓÛÀÓͤӴӴͤÕͧÂÓð£ËÍÌÎÒÎÒ₤ÇÌ
2012-09-15 21:54 894... -
Androidð¡ÙmeasureÒ¢Ó´ÐWRAP_CONTENTÒ₤ÎÒÏÈð£ËÍxmlÍ¡ÍÝÌð£ÑÒÏÈÌÌçÓ´Ìç Ì(ð¡)
2012-10-10 18:14 1194... -
Androidð¡ÙmeasureÒ¢Ó´ÐWRAP_CONTENTÒ₤ÎÒÏÈð£ËÍxmlÍ¡ÍÝÌð£ÑÒÏÈÌÌçÓ´Ìç Ì(ð¡)
2012-10-17 20:05 886... -
Androidð¡ÙÌð£ÑÕÌˋÍ´ÓÍÛÓ¯
2012-11-30 08:59 1205... -
ÐÓ¥Ò₤ÍÓÐð§¢Ó´LexͯC/C++Ìð£Ñ҃ͤð¡¤HTMLÌð£Ñ
2012-07-20 09:37 110008Í¿Ç9ÌÍ ËÍÙÎÿ¥12Í¿Ç7ÌÌ₤ð¡ÿ¥Ó£Ìð¤ÌÍ´Ò§₤ð£ÑÍÙÎÕÂÌÍ¢¨ð¡¯Í₤ÓÍÊÏ ... -
ÐÓ¥Ò₤ÍÓÐÌÙÈÍÒÀ´ÒƒƒÍ¥
2012-07-21 21:49 235808Í¿Ç9ÌÍ ËÍÙÎÿ¥12Í¿Ç7ÌÌ₤ð¡ÿ¥Ó£Ìð¤ÌÍ´Ò§₤ð£ÑÍÙÎÕÂÌÍ¢¨ð¡¯Í₤ÓÍÊÏ ... -
ÐOpenCVÐÒÛ¢ÕÛMat̓Íð¡ÙÌ₤ð¡ˆÍÓÇ ÓÍ¥
2012-07-22 07:10 1208ð£ÍÊˋӃͤÎÌÒçÌÒ¢Ìͯð¤ÒˆÍñÝÓÐÐÐÐÒÛ¢ÕÛ̓Íð¡ÙÌ₤ð¡ˆÍÓÇ ÓÍ¥ ... -
ÐÓ¥Ò₤ÍÓÐÓ´YaccÍÒ₤ÙÌ°ÍÌ
2012-07-23 05:47 182508Í¿Ç9ÌÍ ËÍÙÎÿ¥12Í¿Ç7ÌÌ₤ð ... -
ÐUMLÐUMLÍ ÓÏ̓ÓÓ£ÍÑ
2012-07-24 09:49 100408Í¿Ç9ÌÍ ËÍÙÎÿ¥12Í¿Ç7ÌÌ₤ð¡ÿ¥Ó£Ìð¤ÌÍ´Ò§₤ð£ÑÍÙÎÕÂÌÍ¢¨ð¡¯Í₤ÓÍÊÏ ... -
ÐOpenCVÐÕ£ÍÌ£ÊÌ°Âÿ¥Ì¿ÌÀÐÕ¨Ì₤Ðð¡ÙÍ¥ÐÍÒƒ¿Ì£ÊÌ°Â
2012-07-26 10:52 1482Õ£ÍÌ£ÊÌ°Âÿ¥ÍñÓÏ₤ÿ¥ Õ£ÍÓÛÍÙÍ¥ÍˋÓ´Ó£ÍÛÍÓÇ ... -
Ð̯ÌÛÓ£ÌÐÌͤÓÛÌ°ÿ¥Í¡Í¯ÐͧͿÑÐÍ¢¨ÕÐÍ Ìͤ
2012-07-28 06:15 105108Í¿Ç9ÌÍ ËÍÙÎÿ¥12Í¿Ç7ÌÌ₤ð ... -
ÐOpenCVÐÒÏÓ¿ÌÈÌçÿ¥HarrisÒÏÓ¿ÍShi-TomasiÒÏÓ¿ÌÈÌç
2012-07-31 13:25 1563ÒÏÓ¿ ӿ̓ÌÈÌçð¡Í¿Õ Ì ... -
ÐUMLÐÌÀðƒÍÌÿ¥Ì¤Í¤Ò¢ð§Ó°£Ó£
2012-08-01 17:22 316508Í¿Ç9ÌÍ ËÍÙÎÿ¥12Í¿Ç7ÌÌ₤ð ...
Ó¡Í °Ì´Ò
̘Ó₤ÍÙÎð¿ Ó˜ÒÛ¯ð¡£ÒÎÌÂÒÛ´ð¤ÍÎð§ð§¢Ó´PythonÓ£ÍOpenCVͤÿ¥ÕÒ¢ÌÌÛÌÌ₤ÓÛÍÙÍSobelÓÛÍÙÌËÍÛӯ̓ÍÓÕÍÍÊÓÐ ÕÎÍ ÿ¥Ìð£˜Í₤¥Í ËÍ¢ ÒÎÓͤÿ¥Í ̘OpenCVÿ¥cv2ÿ¥ÍNumPyÿ¥npÿ¥ÐOpenCVÌ₤ð¡ð¡ˆÍ¥¤ÍÊÏÓ̓ÍÍÊÓͤÿ¥Ìðƒð¤ð¡¯Í₤Ó...
ÌÌÛÌÌ₤ÓÛÍÙÿ¥Laplacian Operatorÿ¥Ì₤Òƒ¿Ó¥ÌÈÌçð¡ÙÍ¡¡Ó´Óð¡ÓÏ̯ÍÙÎÍñËÍ ñÿ¥Í¯ÊÍ ÑÕÓ´ð¤ÌÈÌç̓Íð¡ÙÓÍ¢¨Õð¤ÛͤÎÍÍÿ¥Í°Òƒ¿Ó¥Ðʹ̘ð¡£ÕÂð¡Ùÿ¥Ìð£˜Í¯ÌñÝÍ ËÌÂÒÛ´ÌÌÛÌÌ₤ÓÛÍÙÓÓÒۤͤÓÀÿ¥ð£ËÍÍÎð§ÕÒ¢Ó¥Ó´ÍÛÓ¯Òƒ¿Ó¥ÌÈÌçÐ ÌÌÛÌÌ₤...
ÌËð¡ÌËÌ₤ScharrÓÛÍÙÿ¥ÍÛÌ₤SobelÓÛÍÙÓð¡ÓÏÌ¿Ò¢ÿ¥Ì´Í´ÒÏÈÍ°ÌÌÛÌÌ₤ÓÛÍÙÍ´Òƒ¿Ó¥ÍÛð§ð¡Óð¡ÓýƒÓÀÛÕÛÕÂÐScharrÓÛÍÙÒÒð¤Òƒ¿Ó¥ÓÌ¿ÍÌÏÿ¥Ìðƒð¤ÌÇÍ˧ÓÒƒ¿Ó¥ÍÛð§ÍÌ͈ÍȯҧÍÐÍ₤¿ð¤Ì¯ÇÍ¿°ÍÍÓÇÒƒ¿Ó¥ÿ¥ScharrÓÛÍÙÓ3x3Ì ¡Íͨð¡¤ÿ¥...
̓ÍÒƒ¿Ó¥ÌÍÌ₤ÒÛÀÓṲ̂ÒÏÒÏÍ̓ÍÍÊÓð¡ÙÓð¡ð¡ˆÕÒÎÕÂÍÿ¥ÍÛÌÑÍð£ÍƒÍð¡ÙÌÈÌçÒƒ¿Ó¥ÿ¥ð£Ëðƒ¢Ò¢ð¡ÌÙËÓÍÌÍÍÊÓÐÒƒ¿Ó¥ÌÓÌ₤̓Íð¡ÙÕÂÒýÌð¤ÛͤÎÍÓÍÏÓÍÍÓͯ̿ÿ¥Òƒ¿Ó¥ÌÍÓṴ̂̓̓ͤð¤ÌÈÌç̓Íð¤ÛͤÎÓÍÍÐÍ¡¡Ó´ÓÒƒ¿Ó¥ÌÍ...
7. Õ¨Ì₤-ÌÌÛÌÌ₤ÓÛÍÙÿ¥Ò¢Ì₤ð¡ÓÏÓ£Íð¤Õ¨Ì₤Í¿°Ì£ÍÌÌÛÌÌ₤ÓÛÍÙÓÒƒ¿Ó¥ÌÈÌçÌ¿Ì°ÐÍ Ó´Õ¨Ì₤Ì£ÊÌ°ÂÍ´Í£ÕÊ͈Íȯÿ¥ÓÑÍͤӴÌÌÛÌÌ₤ÓÛÍÙÌÈÌçÒƒ¿Ó¥ÐÒ¢ÓÏÌ¿Ì°Í´ð¢ÌÒƒ¿Ó¥Ì¡ ̯ÓÍÌÑÿ¥Íͯð¤ÍˆÍȯÓͧÝÍÐ Í´VC++ð¡ÙÍÛÓ¯Ò¢ð¤ÓÛÌ°ÌÑ...
Í´Ó£ÍÛÓÕÀ¿ÓÛð¡Ùÿ¥ÕÓ´ð¤ð¡ÓÏÓ£Í ¡ÓÒƒ¿Ó¥ÌÈÌçÓÛÍÙÿ¥CannyÓÛÍÙÐSobelÓÛÍÙÍLaplacianÓÛÍÙÐ 1. **CannyÓÛÍÙ**ÿ¥ÓÝJohn F. CannyÌͤÓÿ¥Ì₤ð¡ÓÏÒˆÕͤÓÍÊÓ¤ÏÒƒ¿Ó¥ÌÈÌçÓÛÌ°ÐÍÛÕÒ¢Õ¨Ì₤Ì£ÊÌ°ÂÍ´Í͈ͯÍȯÿ¥ÓÑÍͤӴÕÌÍÊÏÍ¥...
- **Laplacian of Gaussian (LoG)**ÿ¥Õ¨Ì₤ÌÌÛÌÌ₤ÓÛÍÙÌ₤ð¡ÓÏÌÇÍÊÌÓÒƒ¿Ó¥ÌÈÌçÌÌ₤ÿ¥ÍÛÓ£Íð¤Õ¨Ì₤Ì£ÊÌ°ÂÍ´ÍÌÌÛÌÌ₤ÓÛÍÙÿ¥Í₤ð£ËÍ£ÕÊ͈ÍȯͿÑÌÈÌçÒƒ¿Ó¥Ð - **HarrisÒÏÓ¿ÌÈÌç**ÿ¥Ò§ÓÑð¡Ì₤Ó¤₤Òƒ¿Ó¥ÌÈÌçÓÛÌ°ÿ¥ð§HarrisÒÏÓ¿...
2. **Ì¿Ò¢ÓÌÌÛÌÌ₤ÓÛÍÙ**ÿ¥ð§¢Ó´ÌÇÍÊÌÓÓÛÍÙÿ¥ÍÎÕ¨Ì₤-ÌÌÛÌÌ₤ÓÛÍÙÿ¥LoGÿ¥ÿ¥ÍÛÍ₤ð£ËÌÇÍ˧ͯͿ°ÒÀÀÒƒ¿Ó¥ÌÈÌçÍ͈ÍȯÌÍÑÐ 3. **ÕÍ¥ÍÊÓ**ÿ¥ÒÛƒÍÛð¡ð¡ˆÕÍ¥ÿ¥ÍˆÍÂÍ¥¤ÒÑ Ò¢Ò₤ËÕÍ¥ÓÒƒ¿Ó¥Ð ÍÐð£ÈÓ ÍÛÓ¯ Í´Pythonð¡Ùÿ¥Í₤ð£Ëð§¢Ó´...
LaplacianÓÛÍÙÍÌ₤ð§¢Ó´ÌÌÛÌÌ₤ÓÛÍÙÿ¥ÍƒÍÓð¤ÕÑÍ₤¥Ì¯ÿ¥ÓÇÌËÌÈÌç̓ÍÓÓˆÍÿ¥Í₤¿ð¤Òƒ¿Ó¥ÍÛð§ð¿Í ñÌð¤ÍÓÇ ÓýƒÍ¤ÎÐ HarrisÒÏÓ¿ÌÈÌçÌ₤ð¡ÓÏÍÌÑÌÈÌçÒƒ¿Ó¥ÍÒÏÓ¿ÓÌ¿Ì°ÿ¥ÍÛÒÛÀÓÛ̓ÍÍÝմͤÍÓÓ£ÌÍ¥ Õÿ¥ÕÒ¢ÍͤÓˋÕçÓӿ̓ͥ...
OpenCVÌ₤ð¡ð¡ˆÍ¥¤ÍÊÏÓ̤ͥÒÛÀÓṲ̂ÒÏÒÏͤÿ¥Ìðƒð¤ÍÊÓÏÒƒ¿Ó¥ÌÈÌçÓÛÌ°ÿ¥Í ̘SobelÐCannyÍLaplaceÓÛÍÙÐ̘ÌӴͯÒ₤ÎÓ£ð£Ó£ÍÎð§ð§¢Ó´OpenCVÍÛÓ¯Ò¢ð¡ÓÏÒƒ¿Ó¥ÌÈÌçÌ¿Ì°Ð ÕÎÍ ÿ¥ÒÛˋÌð£˜ð¤ÒÏÈÒƒ¿Ó¥ÌÈÌçÓÕÒÎÌÏÐÒƒ¿Ó¥ÌÈÌçÍ₤ð£ËÍ¡ÛÍˋ...
- Roberts ÓÛÍÙÿ¥Ò¢ÓÏÓÛÍÙð§¢Ó´2x2ÓÍñÛÍÌ´ÀÌ¢ÿ¥ÕÒ¢ÒÛÀÓÛÓ¡Õ£ÍÓÇ ÓÍñÛÍ¥ÌËÌÈÌçÒƒ¿Ó¥ÐRoberts ÓÛÍÙÓÛÍÿ¥ð§Í₤¿ÍˆÍȯÌÌÿ¥Í₤¿ð¤ÌÍÒƒ¿Ó¥ÓÌÈÌçÌÌð¡ð§°Ð - Prewitt ÓÛÍÙÿ¥Prewitt ÓÛÍÙÍˋÓ´3x3Ì´ÀÌ¢ÿ¥ÒÛÀÓÛ̯ÇÍ¿°ÍÍÓÇÌ¿Í...
3. ÌÌÛÌÌ₤ÓÛÍÙÿ¥ÌÌÛÌÌ₤ÓÛÍÙÌ₤ð¡ÓÏÌ Ì¿ÍÓÒƒ¿Ó¥ÌÈÌçÓÛÍÙÿ¥ÍÛÌ₤ð¤ÕÑÍ̓ÛÍÌ¿Ó´ÓÓΣÌÈÓ̘ÐÍ´C#ð¡Ùÿ¥Í₤ð£ËÕÒ¢ð¡ð¡ˆ5x5Ì3x3ÓÍñÛÍÌˋÌ´ÀÍÛÓ¯ÿ¥Í ÑÌ ¡Í¢Ì₤ÌÈÌçÍÓÇ Õ£ÍÍ Óð¤ÛͤÎÍÍÐÌÌÛÌÌ₤ÓÛÍÙÍ₤¿ÍˆÍȯÌ₤ÒƒÌÌÿ¥Í ÌÙÊÍ´...
- **ÌÌÛÌÌ₤ÓÛÍÙ**ÿ¥ÌÌÛÌÌ₤ÓÛÍÙÌ₤ð¡ÓÏð¤ÕÑ̓ÛÍÓÛÍÙÿ¥Ó´ð¤ÌÈÌç̓ÍÓÒƒ¿Ó¥ÐÍÛÍ₤¿ÍƒÍð¡ÙÓÒƒ¿Ó¥ÌÒƒÍÊÏÓÍͤÿ¥Í ð¡¤Òƒ¿Ó¥ÍÊÍÓÇ ÓÌÂ₤ͤÎÒƒÍÊÏÐ - ** SobelÓÛÍÙ**ÿ¥SobelÓÛÍÙÌ₤ð¡ÓÏð¡ÕÑÍñÛÍÓÛÍÙÿ¥Í₤ð£ËÒÛÀÓÛ̓Íʹ̯ÇÍ¿°Í...
̘Ìð¡£ÒÎÒÛ´ÒÛ¤ð¤ð¡ÊÓÏÍ¡¡Ó´ÓÒƒ¿Ó¥ÌÈÌçÌ¿Ì°ÿ¥SobelÓÛÍÙÍÌÌÛÌÌ₤ÓÛÍÙÿ¥ð£ËÍÍÛð£˜Í´OpenCVͤð¡ÙÓÍÛӯРÕÎÍ ÿ¥SobelÓÛÍÙÌ₤ð¡ÓÏð¡ÕÑÍñÛÍÓÛÍÙÿ¥Ó´ð¤Ò¢ð¥¥ÒÛÀÓÛ̓ÍӯͤÎ̯ͧÓÌÂ₤ͤÎÐSobelÓÛÍÙÕÒ¢Í₤¿ÍƒÍÒ¢ÒÀ̯ÇÍ¿°ÍÍÓÇÌ¿ÍÓ...
- **Laplacian of Gaussian (LoG)**ÿ¥LoGÓÛÍÙÌ₤Õ¨Ì₤Ì£ÊÌ°ÂÍ´ð¡ÌÌÛÌÌ₤ÓÛÍÙÓÓ£Íÿ¥Í₤ð£ËÌÌÍ£ÕÊ͈ÍȯͿÑÌÈÌçͤӣͯÓÒƒ¿Ó¥Ð - **HoughÍÌÂ**ÿ¥Ò§ÓÑð¡Ì₤ÓÇÌËÓÒƒ¿Ó¥ÌÈÌçÿ¥ð§HoughÍÌÂÍ₤ð£ËÌÈÌçͤÓÇÓ¤¢ÿ¥Ò¢Í₤¿ð¤Ò₤ͨ̓Íð¡Ù...
Í´OpenCVð¡Ùÿ¥Í¡¡ð§¢Ó´ÓΣÌÈÌÌÛÌÌ₤ÓÛÍÙÒ¢ÒÀÒƒ¿Ó¥ÌÈÌçÿ¥Ó£ÍÕͧÓÕÍ¥Í₤ð£Ë̃ͤ҃¿Ó¥Ð 4. **HoughÍÌÂ**ÿ¥HoughÍÌÂÌ₤ð¡ÓÏÍ̯Óˋ¤ÕÇÓÒƒ¿Ó¥ÌÈÌçÌ¿Ì°ÿ¥ÍÛÍ₤ð£Ëð£ÍÍÏ̓ÍÓˋ¤ÕÇÒ§˜ÌÂͯÍ̯Óˋ¤ÕÇÿ¥Í₤£ÌƒÓÇÓ¤¢ÓÍ̯ͧÂÍ¥ÐÒ¢ÓÏÌ¿Ì°...
LOGÓÛÍÙÍ´ÍÊÓ͈ÍȯÍÓ£ÒÌ¿ÕÂÌ₤ÍÓ¤₤ð§¢Ó´ÌÌÛÌÌ₤ÓÛÍÙÌÇð¡¤Ó´°ÍËÿ¥ð§Í₤Ò§Ì Ì°ÌÈÌçͯÌð¤Í¥ÝÒƒ¿Ó¥Ð Í´VSÌDEV-C++ÓÙÕÌÍ¥ÍÓ₤ÍÂð¡ÙÕ Ó§ÛOpenCVͤҢÒÀÒƒ¿Ó¥ÌÈÌçÿ¥ÕÎÍ ÕÒÎÍÛÒÈ OpenCVͤͿÑÍ¯Í ÑÌñ£Í ͯÕÀ¿ÓÛÓÍ Í¨ÓÛͧð¡ÙÐÌËÓÿ¥...
1. SobelÓÛÍÙÿ¥SobelÓÛÍÙÌ₤ð¡ÓÏð¡ÕÑ̓ÛÍÓÛÍÙÿ¥ÕÒ¢ÒÛÀÓÛ̓ÍӯͤÎÍ¥Óð¡ÕÑÍÍ₤¥Ì¯ÌËÌÈÌçÒƒ¿Ó¥ÐÍÛÍ Ì˜ð¡Êð¡ˆÌ¿ÍÓÌÂ₤ͤÎÌ´ÀÌ¢ÿ¥Ì¯ÇÍ¿°ÍÍÓÇÿ¥ÿ¥Í₤ð£ËÌÌÌÈÌç̓Íð¡ÙÓÒƒ¿Ó¥ÿ¥Í¿Ñӣͤ҃¿Ó¥ÓÍÊÏÌÎÌ¿ÍÐ 2. PrewittÓÛÍÙÿ¥ð¡Sobel...
Gauss-LaplaceÓÛÍÙÌ₤Õ¨Ì₤Ì£ÊÌ°ÂÍ´ð¡ÌÌÛÌÌ₤ÓÛÍÙÓÓ£Íÿ¥ÍÛÕÎÍ ð§¢Ó´Õ¨Ì₤Ì£ÊÌ°ÂÍ´Í¿°Ì£ÍƒÍð£ËÍ͈ͯÍȯÿ¥ÓÑÍͤӴÌÌÛÌÌ₤ÓÛÍÙÌÈÌçÒƒ¿Ó¥ÐÌÌÛÌÌ₤ÓÛÍÙÌ₤ð¡ð¡ˆð¤ÕÑ̓ÛÍÓÛÍÙÿ¥ÕÍ¡¡Ó´ÓΣÌÈͧÂÍ¥ÒÀ´Óʤÿ¥ÍÎ[0, -1, 0; -1, 4, -1; 0,...