- жµПиІИ: 288218 жђ°
- жАІеИЂ:

- жЭ•иЗ™: жµОеНЧ
-

жЦЗзЂ†еИЖз±ї
з§ЊеМЇзЙИеЭЧ
- жИСзЪДиµДиЃѓ ( 0)
- жИСзЪДиЃЇеЭЫ ( 0)
- жИСзЪДйЧЃз≠Ф ( 0)
е≠Шж°£еИЖз±ї
- 2014-06 ( 1)
- 2014-02 ( 2)
- 2013-12 ( 4)
- жЫіе§Ъе≠Шж°£...
жЬАжЦ∞иѓДиЃЇ
-
biglinvyпЉЪ
й°ґй°ґй°ґ
ScrollView scrollTo зЪДдљњзФ® еК®зФїжХИжЮЬ
гАРOpenCVгАСCanny иЊєзЉШж£АжµЛ
- еНЪеЃҐеИЖз±їпЉЪ
- androidе≠¶дє†
- еЙНиљ¶дєЛйЙі(иљђиљљ)
Canny иЊєзЉШж£АжµЛзЃЧж≥Х
1986еєіпЉМJOHN CANNY жПРеЗЇдЄАдЄ™еЊИе•љзЪДиЊєзЉШж£АжµЛзЃЧж≥ХпЉМ襀зІ∞дЄЇCannyзЉЦиЊєзЉШж£АжµЛеЩ®[1]гАВ
CannyиЊєзЉШж£АжµЛж†єжНЃеѓєдњ°еЩ™жѓФдЄОеЃЪдљНдєШзІѓињЫи°МжµЛеЇ¶пЉМеЊЧеИ∞жЬАдЉШеМЦйАЉињСзЃЧе≠РпЉМдєЯе∞±жШѓCannyзЃЧе≠РгАВз±їдЉЉдЄО LoG иЊєзЉШж£АжµЛжЦєж≥ХпЉМдєЯе±ЮдЇОеЕИеє≥жїСеРОж±ВеѓЉжХ∞зЪДжЦєж≥ХгАВ
дљњзФ®CannyиЊєзЉШж£АжµЛеЩ®пЉМеЫЊи±°иЊєзЉШж£АжµЛењЕй°їжї°иґ≥дЄ§дЄ™жЭ°дїґпЉЪ
- иГљжЬЙжХИеЬ∞жКСеИґеЩ™е£∞пЉЫ
- ењЕй°їе∞љйЗПз≤Њз°Ѓз°ЃеЃЪиЊєзЉШзЪДдљНзљЃгАВ
зЃЧж≥Хе§ІиЗіжµБз®ЛпЉЪ
1гАБж±ВеЫЊеГПдЄОйЂШжЦѓеє≥жїСжї§ж≥ҐеЩ®еНЈзІѓ:

2гАБдљњзФ®дЄАйШґжЬЙйЩРеЈЃеИЖиЃ°зЃЧеБПеѓЉжХ∞зЪДдЄ§дЄ™йШµеИЧPдЄОQпЉЪ

3гАБеєЕеАЉеТМжЦєдљНиІТ:
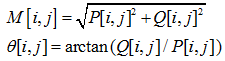
4гАБйЭЮжЮБе§ІеАЉжКСеИґпЉИNMS пЉЙ пЉЪзїЖеМЦеєЕеАЉеЫЊеГПдЄ≠зЪДе±ЛиДКеЄ¶пЉМеН≥еП™дњЭзХЩеєЕеАЉе±АйГ®еПШеМЦжЬАе§ІзЪДзВєгАВ
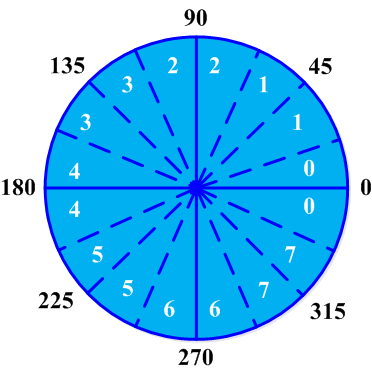
е∞Ж楃寶иІТзЪДеПШеМЦиМГеЫіеЗПе∞ПеИ∞еЬЖеС®зЪДеЫЫдЄ™жЙЗеМЇдєЛдЄАпЉМжЦєеРСиІТеТМеєЕеАЉеИЖеИЂдЄЇпЉЪ

йЭЮжЮБе§ІеАЉжКСеИґйАЪињЗжКСеȴ楃寶篜дЄКжЙАжЬЙйЭЮе±ЛиДКе≥∞еАЉзЪДеєЕеАЉжЭ•зїЖеМЦM[i,j],дЄ≠зЪД楃寶еєЕеАЉе±ЛиДКпЉОињЩдЄАзЃЧж≥Хй¶ЦеЕИе∞Ж楃寶иІТќЄ[i,j]зЪДеПШеМЦиМГеЫіеЗПе∞ПеИ∞еЬЖеС®зЪДеЫЫдЄ™жЙЗеМЇдєЛдЄА,е¶ВдЄЛеЫЊжЙАз§ЇпЉЪ
 
5гАБеПЦйШИеАЉ
-
е∞ЖдљОдЇОйШИеАЉзЪДжЙАжЬЙеАЉиµЛйЫґпЉМеЊЧеИ∞еЫЊеГПзЪДиЊєзЉШйШµеИЧ
- йШИеАЉѕДеПЦеЊЧ姙дљО->еБЗиЊєзЉШ
- йШИеАЉѕДеПЦеЊЧ姙йЂШ->йГ®еИЖиљЃеїК䪥姱
- йАЙзФ®дЄ§дЄ™йШИеАЉ: жЫіжЬЙжХИзЪДйШИеАЉжЦєж°ИпЉО
зЫЄеЕ≥дї£з†Б
CannyзЃЧж≥ХеЃЮзО∞пЉЪ
- зФ®йЂШжЦѓжї§ж≥ҐеЩ®еє≥жїСеЫЊеГПпЉИеЬ®и∞ГзФ®CannyдєЛеЙНиЗ™еЈ±зФ®blurеє≥жїСпЉЙ
- зФ®дЄАйШґеБПеѓЉзЪДжЬЙйЩРеЈЃеИЖжЭ•иЃ°зЃЧ楃寶зЪДеєЕеАЉеТМжЦєеРСпЉО
- 僺楃寶еєЕеАЉеЇФзФ®йЭЮжЮБе§ІеАЉжКСеИґ пЉО
- зФ®еПМйШИеАЉзЃЧж≥Хж£АжµЛеТМињЮжО•иЊєзЉШпЉО
 
void cv::Canny( InputArray _src, OutputArray _dst,
double low_thresh, double high_thresh,
int aperture_size, bool L2gradient )
{
Mat src = _src.getMat();
CV_Assert( src.depth() == CV_8U );
_dst.create(src.size(), CV_8U);
Mat dst = _dst.getMat();
if (!L2gradient && (aperture_size & CV_CANNY_L2_GRADIENT) == CV_CANNY_L2_GRADIENT)
{
//backward compatibility
aperture_size &= ~CV_CANNY_L2_GRADIENT;
L2gradient = true;
}
if ((aperture_size & 1) == 0 || (aperture_size != -1 && (aperture_size < 3 || aperture_size > 7)))
CV_Error(CV_StsBadFlag, "");
#ifdef HAVE_TEGRA_OPTIMIZATION
if (tegra::canny(src, dst, low_thresh, high_thresh, aperture_size, L2gradient))
return;
#endif
const int cn = src.channels();
cv::Mat dx(src.rows, src.cols, CV_16SC(cn));
cv::Mat dy(src.rows, src.cols, CV_16SC(cn));
cv::Sobel(src, dx, CV_16S, 1, 0, aperture_size, 1, 0, cv::BORDER_REPLICATE);
cv::Sobel(src, dy, CV_16S, 0, 1, aperture_size, 1, 0, cv::BORDER_REPLICATE);
if (low_thresh > high_thresh)
std::swap(low_thresh, high_thresh);
if (L2gradient)
{
low_thresh = std::min(32767.0, low_thresh);
high_thresh = std::min(32767.0, high_thresh);
if (low_thresh > 0) low_thresh *= low_thresh;
if (high_thresh > 0) high_thresh *= high_thresh;
}
int low = cvFloor(low_thresh);
int high = cvFloor(high_thresh);
ptrdiff_t mapstep = src.cols + 2;
cv::AutoBuffer<uchar> buffer((src.cols+2)*(src.rows+2) + cn * mapstep * 3 * sizeof(int));
int* mag_buf[3];
mag_buf[0] = (int*)(uchar*)buffer;
mag_buf[1] = mag_buf[0] + mapstep*cn;
mag_buf[2] = mag_buf[1] + mapstep*cn;
memset(mag_buf[0], 0, /* cn* */mapstep*sizeof(int));
uchar* map = (uchar*)(mag_buf[2] + mapstep*cn);
memset(map, 1, mapstep);
memset(map + mapstep*(src.rows + 1), 1, mapstep);
int maxsize = std::max(1 << 10, src.cols * src.rows / 10);
std::vector<uchar*> stack(maxsize);
uchar **stack_top = &stack[0];
uchar **stack_bottom = &stack[0];
/* sector numbers
(Top-Left Origin)
1 2 3
* * *
* * *
0*******0
* * *
* * *
3 2 1
*/
#define CANNY_PUSH(d) *(d) = uchar(2), *stack_top++ = (d)
#define CANNY_POP(d) (d) = *--stack_top
// calculate magnitude and angle of gradient, perform non-maxima supression.
// fill the map with one of the following values:
// 0 - the pixel might belong to an edge
// 1 - the pixel can not belong to an edge
// 2 - the pixel does belong to an edge
for (int i = 0; i <= src.rows; i++)
{
int* _norm = mag_buf[(i > 0) + 1] + 1;
if (i < src.rows)
{
short* _dx = dx.ptr<short>(i);
short* _dy = dy.ptr<short>(i);
if (!L2gradient)
{
for (int j = 0; j < src.cols*cn; j++)
_norm[j] = std::abs(int(_dx[j])) + std::abs(int(_dy[j]));
}
else
{
for (int j = 0; j < src.cols*cn; j++)
_norm[j] = int(_dx[j])*_dx[j] + int(_dy[j])*_dy[j];
}
if (cn > 1)
{
for(int j = 0, jn = 0; j < src.cols; ++j, jn += cn)
{
int maxIdx = jn;
for(int k = 1; k < cn; ++k)
if(_norm[jn + k] > _norm[maxIdx]) maxIdx = jn + k;
_norm[j] = _norm[maxIdx];
_dx[j] = _dx[maxIdx];
_dy[j] = _dy[maxIdx];
}
}
_norm[-1] = _norm[src.cols] = 0;
}
else
memset(_norm-1, 0, /* cn* */mapstep*sizeof(int));
// at the very beginning we do not have a complete ring
// buffer of 3 magnitude rows for non-maxima suppression
if (i == 0)
continue;
uchar* _map = map + mapstep*i + 1;
_map[-1] = _map[src.cols] = 1;
int* _mag = mag_buf[1] + 1; // take the central row
ptrdiff_t magstep1 = mag_buf[2] - mag_buf[1];
ptrdiff_t magstep2 = mag_buf[0] - mag_buf[1];
const short* _x = dx.ptr<short>(i-1);
const short* _y = dy.ptr<short>(i-1);
if ((stack_top - stack_bottom) + src.cols > maxsize)
{
int sz = (int)(stack_top - stack_bottom);
maxsize = maxsize * 3/2;
stack.resize(maxsize);
stack_bottom = &stack[0];
stack_top = stack_bottom + sz;
}
int prev_flag = 0;
for (int j = 0; j < src.cols; j++)
{
#define CANNY_SHIFT 15
const int TG22 = (int)(0.4142135623730950488016887242097*(1<<CANNY_SHIFT) + 0.5);
int m = _mag[j];
if (m > low)
{
int xs = _x[j];
int ys = _y[j];
int x = std::abs(xs);
int y = std::abs(ys) << CANNY_SHIFT;
int tg22x = x * TG22;
if (y < tg22x)
{
if (m > _mag[j-1] && m >= _mag[j+1]) goto __ocv_canny_push;
}
else
{
int tg67x = tg22x + (x << (CANNY_SHIFT+1));
if (y > tg67x)
{
if (m > _mag[j+magstep2] && m >= _mag[j+magstep1]) goto __ocv_canny_push;
}
else
{
int s = (xs ^ ys) < 0 ? -1 : 1;
if (m > _mag[j+magstep2-s] && m > _mag[j+magstep1+s]) goto __ocv_canny_push;
}
}
}
prev_flag = 0;
_map[j] = uchar(1);
continue;
__ocv_canny_push:
if (!prev_flag && m > high && _map[j-mapstep] != 2)
{
CANNY_PUSH(_map + j);
prev_flag = 1;
}
else
_map[j] = 0;
}
// scroll the ring buffer
_mag = mag_buf[0];
mag_buf[0] = mag_buf[1];
mag_buf[1] = mag_buf[2];
mag_buf[2] = _mag;
}
// now track the edges (hysteresis thresholding)
while (stack_top > stack_bottom)
{
uchar* m;
if ((stack_top - stack_bottom) + 8 > maxsize)
{
int sz = (int)(stack_top - stack_bottom);
maxsize = maxsize * 3/2;
stack.resize(maxsize);
stack_bottom = &stack[0];
stack_top = stack_bottom + sz;
}
CANNY_POP(m);
if (!m[-1]) CANNY_PUSH(m - 1);
if (!m[1]) CANNY_PUSH(m + 1);
if (!m[-mapstep-1]) CANNY_PUSH(m - mapstep - 1);
if (!m[-mapstep]) CANNY_PUSH(m - mapstep);
if (!m[-mapstep+1]) CANNY_PUSH(m - mapstep + 1);
if (!m[mapstep-1]) CANNY_PUSH(m + mapstep - 1);
if (!m[mapstep]) CANNY_PUSH(m + mapstep);
if (!m[mapstep+1]) CANNY_PUSH(m + mapstep + 1);
}
// the final pass, form the final image
const uchar* pmap = map + mapstep + 1;
uchar* pdst = dst.ptr();
for (int i = 0; i < src.rows; i++, pmap += mapstep, pdst += dst.step)
{
for (int j = 0; j < src.cols; j++)
pdst[j] = (uchar)-(pmap[j] >> 1);
}
}
 
Canny() и∞ГзФ®жО•еП£пЉИC++пЉЙпЉЪ
void Canny(InputArray image, OutputArray edges, double threshold1, double threshold2,
int apertureSize=3, bool L2gradient=false )
еЃЮиЈµз§ЇдЊЛ
 
Mat src, src_gray;
Mat dst, detected_edges;
int edgeThresh = 1;
int lowThreshold;
int const max_lowThreshold = 100;
int ratio = 3;
int kernel_size = 3;
char* window_name = "Edge Map";
void CannyThreshold(int, void*)
{
/// Reduce noise with a kernel 3x3
blur( src_gray, detected_edges, Size(3,3) );
/// Canny detector
Canny( detected_edges, detected_edges, lowThreshold, lowThreshold*ratio, kernel_size );
dst = Scalar::all(0);
src.copyTo( dst, detected_edges);
imshow( window_name, dst );
}
int main( )
{
src = imread( "images\\happycat.png" );
if( !src.data )
{ return -1; }
dst.create( src.size(), src.type() );
cvtColor( src, src_gray, CV_BGR2GRAY );
namedWindow( window_name, CV_WINDOW_AUTOSIZE );
createTrackbar( "Min Threshold:", window_name, &lowThreshold, max_lowThreshold, CannyThreshold );
CannyThreshold(0, 0);
waitKey(0);
return 0;
}
 
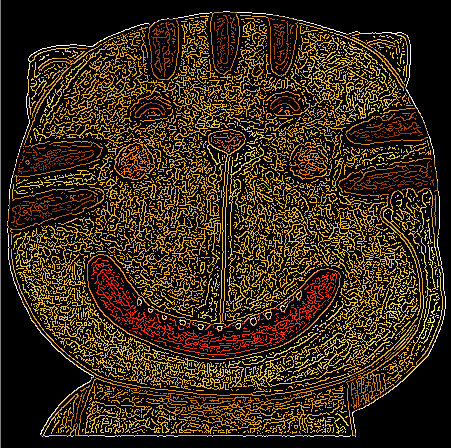
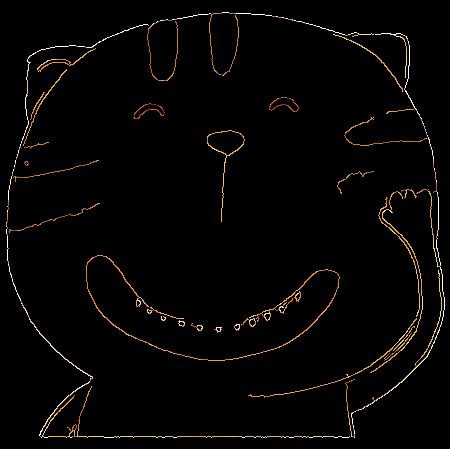
еОЯеЫЊпЉЪ

иЊєзЉШж£АжµЛжХИжЮЬеЫЊпЉЪ
пЉИдїОеЈ¶еИ∞еП≥lowThreadеИЖеИЂдЄЇ0гАБ50гАБ100пЉЙ

 
еПВиАГжЦЗзМЃпЉЪ
[1] Canny. A Computational Approach to Edge Detection, IEEE Trans. on Pattern Analysis and Machine Intelligence, 8(6), pp. 679-698 (1986).
 
иљђиљљиѓЈж≥®жШОеЗЇе§ДпЉЪhttp://blog.csdn.net/xiaowei_cqu/article/details/7839140
иµДжЇРдЄЛиљљпЉЪhttp://download.csdn.net/detail/xiaowei_cqu/4483966
 
 
 
[1] Canny. A Computational Approach to Edge Detection, IEEE Trans. on Pattern Analysis and Machine Intelligence, 8(6), pp. 679-698 (1986).


- 2012-08-08 10:17
- жµПиІИ 2018
- иѓДиЃЇ(0)
- еИЖз±ї:зІїеК®еЉАеПС
- жЯ•зЬЛжЫіе§Ъ
еПСи°®иѓДиЃЇ

-
unityеЯЇз°АеЉАеПС----зЙ©дљУдљНзІїеТМжЧЛиљђеЃЮзФ®дї£з†Б
2013-11-21 22:46 1282using UnityEngine; using Syst ... -
android еК®жАБжЧґйТЯ йЩДжЇРз†Б
2013-09-24 12:03 1354¬† ¬† иЗ™еЃЪдєЙViewеЃЮиЈµ дЊЛе≠Рдї£з†Б иЗ™еЃЪдєЙеК®жАБжЧґйТЯ ... -
android Dialog иГМжЩѓйЧЃйҐШ
2013-08-14 11:22 1214¬† ¬† ¬† ¬†жИСдїђеЬ®дљњзФ®иЗ™еЃЪдєЙзЪДDialogзЪДжЧґеАЩпЉМеЦЬ搥иЗ™еЈ± ... -
ScrollView scrollTo зЪДдљњзФ® еК®зФїжХИжЮЬ
2013-08-05 17:43 4645¬† ¬†дїК姩зФ®еИ∞дЇЖScrollView scrollToжЦєж≥Х ... -
AndroidдЄ≠ViewзїШеИґдЉШеМЦдєЛдЄА---- дЉШеМЦеЄГе±Ае±Вжђ°
2012-09-04 23:00 1107      ... -
AndroidдЄ≠ViewзїШеИґдЉШеМЦдЇМдЄА---- дљњзФ®<include />ж†Зз≠Ње§НзФ®еЄГе±АжЦЗдїґ
2012-09-08 13:54 1076  ... -
AndroidдЄ≠ViewзїШеИґдЉШеМЦдєЛдЄЙ---- дЉШеМЦView
2012-09-13 21:00 1097  ... -
еЕ∞жЮЧдїїеК°зЃ°зРЖеЇФзФ®з®ЛеЇПйЫП嚥зЙИдї•еПКж¶Ви¶БиѓіжШО
2012-09-15 21:54 894... -
AndroidдЄ≠measureињЗз®ЛгАБWRAP_CONTENTиѓ¶иІ£дї•еПКxmlеЄГе±АжЦЗдїґиІ£жЮРжµБз®ЛжµЕжЮР(дЄК)
2012-10-10 18:14 1194... -
AndroidдЄ≠measureињЗз®ЛгАБWRAP_CONTENTиѓ¶иІ£дї•еПКxmlеЄГе±АжЦЗдїґиІ£жЮРжµБз®ЛжµЕжЮР(дЄЛ)
2012-10-17 20:05 885... -
AndroidдЄ≠жЦЗдїґйАЙжЛ©еЩ®зЪДеЃЮзО∞
2012-11-30 08:59 1203... -
гАРзЉЦиѓСеОЯзРЖгАСдљњзФ®Lexе∞ЖC/C++жЦЗдїґиЊУеЗЇдЄЇHTMLжЦЗдїґ
2012-07-20 09:37 110008еєі9жЬИеЕ•е≠¶пЉМ12еєі7жЬИжѓХдЄЪпЉМзїУжЭЯдЇЖжИСеЬ®иљѓдїґе≠¶йЩҐжДЙењЂдЄ∞еѓМзЪДе§І ... -
гАРзЉЦиѓСеОЯзРЖгАСж≠£еИЩи°®иЊЊеЉП
2012-07-21 21:49 235708еєі9жЬИеЕ•е≠¶пЉМ12еєі7жЬИжѓХдЄЪпЉМзїУжЭЯдЇЖжИСеЬ®иљѓдїґе≠¶йЩҐжДЙењЂдЄ∞еѓМзЪДе§І ... -
гАРOpenCVгАСиЃњйЧЃMatеЫЊеГПдЄ≠жѓПдЄ™еГПзі†зЪДеАЉ
2012-07-22 07:10 1208дїК姩зЩЊеЇ¶жРЬиµДжЦЩињШжРЬеИ∞дЇЖиЗ™еЈ±зЪДгАВгАВгАВгАКиЃњйЧЃеЫЊеГПдЄ≠жѓПдЄ™еГПзі†зЪДеАЉ ... -
гАРзЉЦиѓСеОЯзРЖгАСзФ®YaccеБЪиѓ≠ж≥ХеИЖжЮР
2012-07-23 05:47 182508еєі9жЬИеЕ•е≠¶пЉМ12еєі7жЬИжѓХд ... -
гАРUMLгАСUMLеЗ†зІНеЫЊзЪДзїШеИґ
2012-07-24 09:49 100408еєі9жЬИеЕ•е≠¶пЉМ12еєі7жЬИжѓХдЄЪпЉМзїУжЭЯдЇЖжИСеЬ®иљѓдїґе≠¶йЩҐжДЙењЂдЄ∞еѓМзЪДе§І ... -
гАРOpenCVгАСйВїеЯЯжї§ж≥ҐпЉЪжЦєж°ЖгАБйЂШжЦѓгАБдЄ≠еАЉгАБеПМиЊєжї§ж≥Ґ
2012-07-26 10:52 1482йВїеЯЯжї§ж≥ҐпЉИеНЈзІѓпЉЙ йВїеЯЯзЃЧе≠РеАЉеИ©зФ®зїЩеЃЪеГПзі† ... -
гАРжХ∞жНЃзїУжЮДгАСжОТеЇПзЃЧж≥ХпЉЪеЄМе∞ФгАБељТеєґгАБењЂйАЯгАБе†ЖжОТеЇП
2012-07-28 06:15 105108еєі9жЬИеЕ•е≠¶пЉМ12еєі7жЬИжѓХд ... -
гАРOpenCVгАСиІТзВєж£АжµЛпЉЪHarrisиІТзВєеПКShi-TomasiиІТзВєж£АжµЛ
2012-07-31 13:25 1563иІТзВє зЙєеЊБж£АжµЛдЄОеМєйЕНжШ ... -
гАРUMLгАСж°ИдЊЛеИЖжЮРпЉЪжЬЇеЬЇињРдљЬз≥їзїЯ
2012-08-01 17:22 316508еєі9жЬИеЕ•е≠¶пЉМ12еєі7жЬИжѓХд ...
зЫЄеЕ≥жО®иНР
**OpenCV CannyиЊєзЉШж£АжµЛиѓ¶иІ£** CannyиЊєзЉШж£АжµЛжШѓдЄАзІНзїПеЕЄзЪДеЫЊеГПе§ДзРЖзЃЧж≥ХпЉМеєњж≥ЫеЇФзФ®дЇОиЃ°зЃЧжЬЇиІЖиІЙгАБеЫЊеГПеИЖжЮРеТМжЬЇеЩ®е≠¶дє†з≠ЙйҐЖеЯЯгАВзФ±John F. CannyеЬ®1986еєіжПРеЗЇпЉМиѓ•зЃЧж≥ХжЧ®еЬ®жЙЊеИ∞еЫЊеГПдЄ≠зЪДжЬАжШЊиСЧиЊєзЉШпЉМеРМжЧґе∞љеПѓиГљеЗПе∞Сиѓѓж£АеТМ...
OpenCV CannyиЊєзЉШж£АжµЛ OpenCVжШѓдЄАдЄ™иЃ°зЃЧжЬЇиІЖиІЙеЇУпЉМжПРдЊЫдЇЖиЃЄе§ЪжЬЙзФ®зЪДеЗљжХ∞еТМз±їжЭ•е§ДзРЖеЫЊеГПеТМиІЖйҐСгАВеЕґдЄ≠пЉМCannyиЊєзЉШж£АжµЛжШѓдЄАдЄ™еЄЄзФ®зЪДеЫЊеГПе§ДзРЖжКАжЬѓпЉМзФ®дЇОж£АжµЛеЫЊеГПдЄ≠зЪДиЊєзЉШгАВдЄЛйЭҐе∞Жиѓ¶зїЖдїЛзїНOpenCVдЄ≠зЪДCannyиЊєзЉШж£АжµЛгАВ ...
еЬ®VC++дЄ≠дљњзФ®OpenCVињЫи°МCannyиЊєзЉШж£АжµЛпЉМдљ†йЬАи¶БеМЕеРЂењЕи¶БзЪДе§іжЦЗдїґпЉМе¶В`<opencv2/opencv.hpp>`пЉМзДґеРОеК†иљљеЫЊеГПпЉМи∞ГзФ®`cv::Canny`еЗљжХ∞гАВињЩдЄ™еЗљжХ∞зЪДеПВжХ∞йАЪеЄЄеМЕжЛђжЇРеЫЊеГПгАБдљОйШИеАЉгАБйЂШйШИеАЉгАБиЊєзЉШињЮжО•зЪДжЬАе∞ПеЃљеЇ¶дї•еПКзФ®дЇОж£АжµЛзЪД...
еЬ®еЃЮй™МињЗз®ЛдЄ≠пЉМйАЪеЄЄдЉЪеЬ®VC++6.0з≠ЙеЉАеПСзОѓеҐГдЄ≠йЫЖжИРOpenCVеЇУпЉМзЉЦеЖЩзЫЄеЇФзЪДC++дї£з†БжЭ•еЃЮзО∞CannyиЊєзЉШж£АжµЛгАВеЃЮй™МзїУжЮЬдЉЪе±Хз§ЇдЄНеРМйШИеАЉдЄЛзЪДиЊєзЉШж£АжµЛжХИжЮЬпЉМйЪПзЭАйШИеАЉеҐЮе§ІпЉМиЊєзЉШж£АжµЛжЫіеК†дњЭеЃИпЉМеП™дњЭзХЩдЇЖеЫЊеГПдЄ≠дЇЃеЇ¶еПШеМЦжЬАжШОжШЊзЪДйГ®еИЖ...
иѓїеПЦеЫЊзЙЗпЉМеѓєеЕґињЫи°МиЊєзЉШж£АжµЛжУНдљЬпЉМеєґеПѓжШЊз§ЇеОЯеЫЊеГПеТМиЊєзЉШеМЦеРОзЪДеЫЊзЙЗ
еЬ®жЬђжХЩз®ЛдЄ≠пЉМжИСдїђе∞ЖжЈ±еЕ•жОҐиЃ®е¶ВдљХеЬ®Visual Studio 2015дЄКдљњзФ®C++еТМOpenCVеЇУжЭ•еЃЮзО∞CannyиЊєзЉШж£АжµЛгАВ й¶ЦеЕИпЉМиЃ©жИСдїђдЇЖиІ£CannyиЊєзЉШж£АжµЛзЪДеЯЇжЬђеОЯзРЖгАВCannyзЃЧж≥ХдЄїи¶БзФ±дї•дЄЛдЇФдЄ™ж≠•й™§зїДжИРпЉЪ 1. **йЂШжЦѓжї§ж≥Ґ**пЉЪжґИйЩ§еЫЊеГПдЄ≠зЪД...
OpenCVдєЛCannyиЊєзЉШж£АжµЛжШѓеЫЊеГПе§ДзРЖдЄ≠зЪДдЄАдЄ™йЗНи¶Бж¶ВењµпЉМеЃГжШѓдЄАзІНе§ЪзЇІиЊєзЉШж£АжµЛзЃЧж≥ХпЉМзФ±John F. CannyеЬ®1986еєіжПРеЗЇгАВиѓ•зЃЧж≥Хдї•еЕґйЂШжХИжАІеТМеЗЖз°ЃжАІиСЧзІ∞пЉМ襀府ж≥ЫеЇФзФ®дЇОиЃ°зЃЧжЬЇиІЖиІЙгАБеЫЊеГПеИЖжЮРеТМжЬЇеЩ®е≠¶дє†з≠ЙйҐЖеЯЯгАВCannyиЊєзЉШж£АжµЛ...
CannyиЊєзЉШж£АжµЛзЃЧе≠РжШѓJohn F. CannyдЇО 1986 еєіеЉАеПСеЗЇжЭ•зЪДдЄАдЄ™е§ЪзЇІиЊєзЉШж£АжµЛзЃЧж≥ХгАВCanny иЊєзЉШж£АжµЛзЪДжХ∞е≠¶еОЯзРЖеТМзЃЧж≥ХеЃЮзО∞ињЩйЗМе∞±дЄНеЖНдЇЖпЉМжЬЙеЕіиґ£зЪДиѓїиАЕеПѓдї•жЯ•йШЕдЄУдЄЪдє¶з±НпЉМжЬђжЦЗдЄїи¶БдїЛзїНе¶ВдљХеЬ®OpenCVдЄ≠еѓєеЫЊеГПињЫи°МCanny иЊєзЉШ...
еПѓзЫіжО•дљњзФ®
CannyиЊєзЉШж£АжµЛжШѓOpenCVдЄ≠еЄЄзФ®зЪДдЄАзІНзїПеЕЄиЊєзЉШж£АжµЛжЦєж≥ХпЉМзФ±John F. CannyеЬ®1986еєіжПРеЗЇгАВињЩдЄ™жЦєж≥ХйАЪињЗе§ЪзЇІиЃ°зЃЧеТМйЭЮжЮБе§ІеАЉжКСеИґжЭ•жЬЙжХИеЬ∞жЙЊеИ∞еЫЊеГПдЄ≠зЪДиЊєзЉШпЉМеРМжЧґеЗПе∞СеБЗйШ≥жАІиЊєзЉШзЪДж£АжµЛгАВ еЬ®гАРж†ЗйҐШгАС"opencv еЃЮзО∞cannyж£АжµЛ...
"OpenCVеЃЮзО∞CannyиЊєзЉШж£АжµЛ" OpenCVжШѓдЄАжђЊеКЯиГљеЉЇе§ІзЪДиЃ°зЃЧжЬЇиІЖиІЙеЇУпЉМеЃГжПРдЊЫдЇЖиЃЄе§ЪжЬЙзФ®зЪДеЗљжХ∞еТМз±їжЭ•е§ДзРЖеЫЊеГПеТМиІЖйҐСгАВCannyиЊєзЉШж£АжµЛжШѓеЫЊеГПе§ДзРЖдЄ≠зЪДдЄАзІНйЗНи¶БжКАжЬѓпЉМеЃГеПѓдї•ж£АжµЛеЫЊеГПдЄ≠зЪДиЊєзЉШдњ°жБѓпЉМдїОиАМеѓєеЫЊеГПињЫи°МеИЖеЙ≤еТМиѓЖеИЂ...
жЬђзѓЗе∞Жиѓ¶зїЖдїЛзїНCannyиЊєзЉШж£АжµЛзЃЧж≥ХеЬ®OpenCVдЄ≠зЪДеЇФзФ®гАВ CannyзЃЧж≥ХзФ±John F. CannyеЬ®1986еєіжПРеЗЇпЉМеЃГжШѓдЄАзІНе§ЪзЇІиЊєзЉШж£АжµЛжЦєж≥ХпЉМйАЪињЗдЄАз≥їеИЧе§ДзРЖж≠•й™§жЭ•еѓїжЙЊеЫЊеГПдЄ≠зЪДиЊєзЉШгАВCannyзЃЧж≥ХдЄїи¶БеМЕеРЂдї•дЄЛеЫЫдЄ™ж≠•й™§пЉЪ 1. **йЂШжЦѓжї§ж≥Ґ*...
opencvдЄ≠зЪДcannyиЊєзЉШж£АжµЛпЉМеПѓеЃЮзО∞иЊєзЉШеПСзО∞пЉМжѓФprewittеТМsobelзЃЧе≠РжЫізїЖ
жЬђжЦЗе∞ЖжЈ±еЕ•жОҐиЃ®е¶ВдљХеИ©зФ®OpenCVеЃЮзО∞CannyиЊєзЉШж£АжµЛпЉМеєґдїЛзїНе¶ВдљХжЙЛеК®и∞ГжХійШИеАЉдї•дЉШеМЦзїУжЮЬгАВ CannyиЊєзЉШж£АжµЛзЃЧж≥ХзФ±John F. CannyдЇО1986еєіжПРеЗЇпЉМеЃГйАЪињЗе§ЪзЇІе§ДзРЖжЭ•жЙЊеИ∞еЫЊеГПдЄ≠зЪДиЊєзЉШгАВиѓ•зЃЧж≥ХдЄїи¶БеМЕжЛђдї•дЄЛеЗ†дЄ™ж≠•й™§пЉЪ 1. **...
еЬ®C++дЄ≠еЃЮзО∞CannyиЊєзЉШж£АжµЛпЉМйАЪеЄЄдЉЪжґЙеПКеИ∞OpenCVеЇУпЉМињЩжШѓдЄАдЄ™еЉЇе§ІзЪДеЉАжЇРиЃ°зЃЧжЬЇиІЖиІЙеЇУпЉМжПРдЊЫдЇЖиЃЄе§ЪйҐДеЃЪдєЙзЪДеЗљжХ∞жЭ•еЃЮзО∞еЫЊеГПе§ДзРЖдїїеК°пЉМеМЕжЛђCannyиЊєзЉШж£АжµЛгАВдї•дЄЛжШѓдЄАиИђж≠•й™§пЉЪ 1. еѓЉеЕ•ењЕи¶БзЪДOpenCVеЇУгАВ 2. иѓїеПЦеЫЊеГПжХ∞жНЃгАВ...
еЬ®PythonдЄ≠пЉМжИСдїђеПѓдї•дљњзФ®OpenCVеЇУжЭ•еЃЮзО∞CannyиЊєзЉШж£АжµЛгАВеЬ®жПРдЊЫзЪД`canny.py`жЦЗдїґдЄ≠пЉМеЊИеПѓиГљеМЕеРЂдЇЖе¶ВдЄЛдї£з†БзЙЗжЃµпЉЪ ```python import cv2 import numpy as np # иѓїеПЦеЫЊеГП image = cv2.imread('input_image.jpg', 0) ...
еЖЕеЃєж¶Ви¶БпЉЪжЬђжЦЗй¶ЦеЕИиѓ¶зїЖдїЛзїНдЇЖOpenCVпЉМеМЕжЛђеЕґиГМжЩѓгАБзЙєзВєгАБдЄїи¶БеКЯиГљеПКеЃЙи£ЕжЦєж≥ХпЉМйЪПеРОйЗНзВєиЃ≤иІ£дЇЖCannyиЊєзЉШж£АжµЛзЃЧж≥ХзЪДеОЯзРЖгАБж≠•й™§еПКеЕґеЬ®OpenCVдЄ≠зЪДеЃЮзО∞жЦєеЉПгАВжЬАеРОпЉМиЃ®иЃЇдЇЖCannyиЊєзЉШж£АжµЛзЪДеЇФзФ®еЬЇжЩѓеТМи∞ГеПВжКАеЈІгАВ йАВеРИдЇЇзЊ§...
OpenCV-python CannyиЊєзЉШж£АжµЛиѓ¶иІ£ OpenCV-python CannyиЊєзЉШж£АжµЛжШѓдЄАзІНеЄЄзФ®зЪДеЫЊеГПе§ДзРЖжКАжЬѓпЉМзФ®дЇОж£АжµЛеЫЊеГПдЄ≠зЪДиЊєзЉШдњ°жБѓгАВжЬђжЦЗе∞Жиѓ¶зїЖдїЛзїНOpenCV-pythonдЄ≠CannyиЊєзЉШж£АжµЛзЪДеОЯзРЖгАБеЃЮзО∞жЦєж≥ХеТМдї£з†БеЃЮзО∞гАВ дЄАгАБCannyиЊєзЉШ...
жЬђз®ЛеЇПйЗЗзФ®opencvеЃЮзО∞дЇЖеѓєиІЖйҐСжµБзЪДcannyиЊєзЉШж£АжµЛ