
先来介绍下 media,确切的说应该是 CSS media queries(CSS 媒体查询),媒体查询包含了一个媒体类型和至少一个使用如宽度、高度和颜色等媒体属性来限制样式表范围的表达式。CSS3 加入的媒体查询使得无需修改内容便可以使样式应用于某些特定的设备范围。
那么该怎么定义 media 呢,看下面的代码,你肯定能猜出个大概。
<!-- link元素中的CSS媒体查询 --> <link rel="stylesheet" media="(max-width: 800px)" href="example.css" /> <!-- 样式表中的CSS媒体查询 --> <style> @media (max-width: 600px) { .facet_sidebar { display: none; } } </style>
关于解释,文档中是这么说的,当媒体查询为真时,相关的样式表或样式规则就会按照正常的级联规则被应用。即使媒体查询返回假, <link> 标签上带有媒体查询的样式表仍将被下载(只不过不会被应用)。
所以呢,这也是一种弊端,如果说对某个页面定义了多个样式标准来因对不同的 media 属性的话,那在页面的加载时间将会受到影响,但是话有说回来,在当前网络快速发展的时代,网速也在不断地完善和提高,因此影响并不大,几乎可以忽略不计。
media 还可以通过逻辑操作符(and、not、only 等)来组成 media 表达式,书写更复杂的过滤条件,这些表达式我就不再这边一一说明了,想深入了解的同学,可以阅读相关的说明文档:https://developer.mozilla.org/en-US/docs/Web/CSS/Media_Queries/Using_media_queries 这里面有做详细的介绍。
接下来我们来用几个 Demo 来演示下 media 的用法及表现。
既然我们今天的目的是探讨如何监听 devicePixelRatio 属性的变化,那么我们就以在不同的 devicePixelRatio 值情况下,来改变某个 div 的 background 样式,具体的代码如下:
<!DOCTYPE html>
<html>
<head>
<meta charset="utf-8">
<title></title>
<style media="screen">
@media screen and (min-resolution: 2dppx) {
#image {
background : red;
}
}
@media screen and (min-resolution: 1dppx) {
#image {
background: #000;
}
}
</style>
</head>
<body>
<div id="image" style="width:100px; height:100px"></div>
</body>
</html>
代码有了,那么要怎么测试呢?在一般情况下,devicePixelRatio 属相是不会变化的,但是肯定会存在特殊情况的,就比如说,你的电脑接了两个显示器,而且两台浏览器的 devicePixelRatio 属性是不一样的,那么恭喜你,你已经具备测试条件,只需要将页面从一个屏拖到另外一个屏,这样你就可以看到效果了。
有去测试的同学会发现,div 的背景色并没有想代码中设置的那样,在不同的 devicePixelRatio 属性值下,展现出不同的颜色,这是为什么呢?
这代码是我最开始写代码,运行后发现没效果,起初我也不知道原因,在跨屏拖动页面的时候,在浏览器控制台中,我找到了原因。那么到底是什么原因导致设置无效的呢?我们来看看两个屏幕下的 Style 内容截图,左边是 min-resolution 等于 1,右边是等于 2
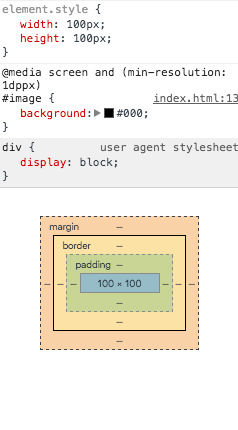
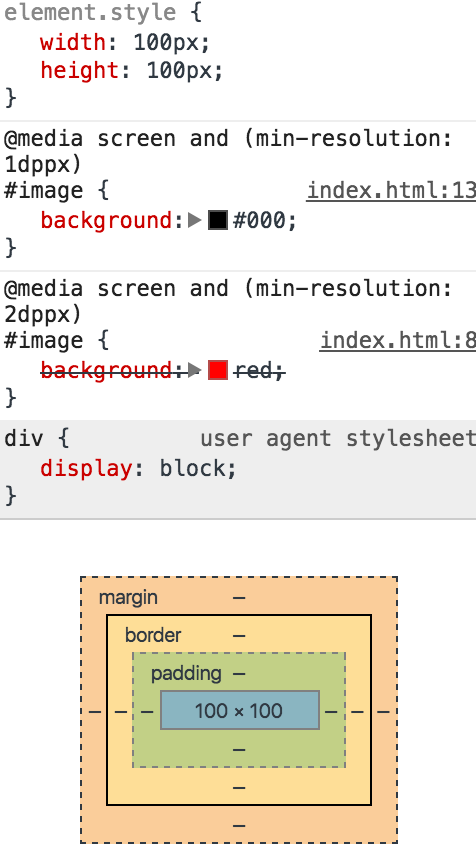
对比着两个图,可以发现,在 min-resolution 等于 2 的情况下,在里面定义的属性被覆盖掉了,并没有生效,这是为什么呢?
要解释的话,这里恐怕需要补充一点知识,就是关于 min- 和 max- 的前缀,在代码中的所起到的具体效果,在文档中是这么描述的:大多数媒体属性带有 “min-” 和 “max-” 前缀,用于表达 “大于等于” 和 “小于等于”。这避免了使用与HTML和XML冲突的 “<” 和 “>” 字符。如果你未向媒体属性指定一个值,并且该特性的实际值不为零,则该表达式被解析为真。如果浏览器运行的设备上没有该属性值,包含这个属性值的表达式一般返回假。
其实上面的说明已经帮我解释清楚了,我再通俗地和大家解释一下:当 devicePixelRatio 为 1 时,只有 min-resolution: 1dppx 这个条件满足,因此 div 的颜色是黑色没错;当 devicePixelRatio 为 2 时,两个 media 都满足条件,同时 CSS 的规则是后加载的样式将会覆盖先加载的样式,由于我么将 min-resolution: 1dppx 的 media 写在后面,因此如果两个 media 都满足条件的话, min-resolution: 1dppx 的 media 将会覆盖 min-resolution: 2dppx 的 media,因此不管你把页面拖到那个屏幕,那个 div 的背景色都是黑色。
那么我们将两个 media 调换一下位置,问题就顺利地解决了。
<style media="screen"> @media screen and (min-resolution: 1dppx) { #image { background: #000; } } @media screen and (min-resolution: 2dppx) { #image { background : red; } } </style>
以上是根据不同的 media 条件设置不同的样式,这是 CSS 的做法,在 JavaScript 中,没有专门的方法来监听 window.devicePixelRatio 属性变化,那么该怎么监听 devicePixelRatio 属性的变化呢?方法也很简单,看看下面的代码,你一定就明白了:
window.matchMedia('screen and (min-resolution: 2dppx)').addListener(function(e) {
console.info(e, window.devicePixelRatio);
});
稍微解释下,通过 window.matchMedia(‘media expression’) 方法获取到对应的 media,然后通过 addListener(function(e) {}) 来监听 media 的变化。
有玩过 Canvas 的朋友一定知道,要想绘制出来的内容效果最佳的话,Canvas 自身的 width 和 height 属性值与 style 中的 width 和 height 的比例应该恰好等于 devicePixelRatio 的值,所有如果你在切换不同 devicePixelRatio 属性值的屏幕时,没有重新设置 Canvas 的宽高的话,绘制出来的画面将不是最佳的效果。
接下来我们基于 HT for Web 的 3D 模型来做一个小实验。实验的内容是这样的,在 GraphView 中有一辆车根据某条路线前行,当拖到另外一个屏幕的时候,换辆车子。先来看看效果图:
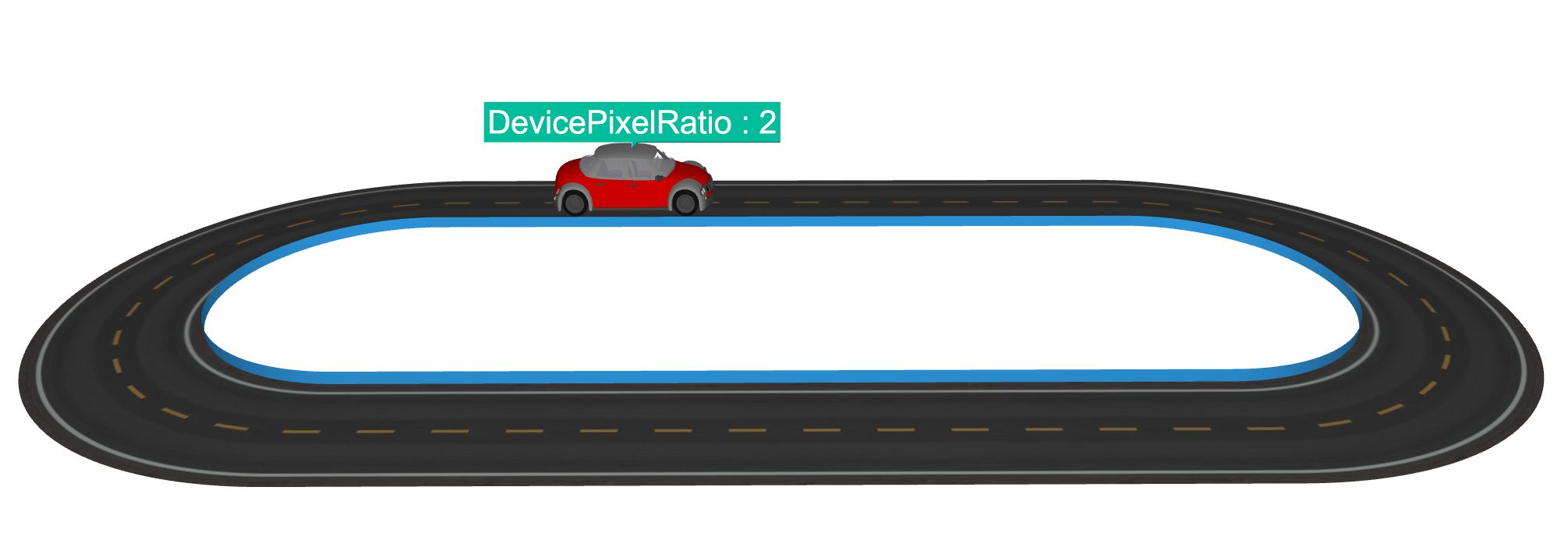
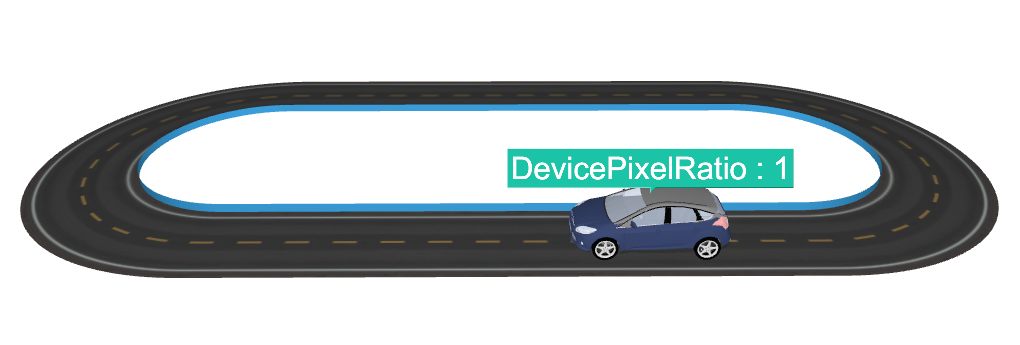
上面两张图分别是在不同的屏幕中的截图,车子动起来的效果可以访问以下链接:
实验的地址是:http://www.hightopo.com/demo/media/index.html 以下是实验的具体代码:
<!DOCTYPE html>
<html>
<head>
<meta charset="utf-8">
<title>HT for Web</title>
<style media="screen">
@media screen and (min-resolution: 2dppx) {}
html, body {
padding: 0px;
margin: 0px;
}
</style>
<script src="../../oldhtforweb/lib/core/ht.js"></script>
<script src="../../oldhtforweb/lib/plugin/ht-modeling.js"></script>
<script src="../../oldhtforweb/lib/plugin/ht-obj.js"></script>
<script>
ht.Default.setImage('road', './images/road.jpg');
var init = function() {
g3d = new ht.graph3d.Graph3dView();
var dm = g3d.dm();
g3d.addToDOM();
g3d.setEye(1200, 300, 0);
g3d.getNote = function(data) {
if (data.getTag() !== 'carNode') return null;
return 'DevicePixelRatio : ' + window.devicePixelRatio;
};
var carIndex = 0;
window.matchMedia('screen and (min-resolution: 2dppx)').addListener(function() {
carIndex = (carIndex + 1) % 2;
var obj = result[carIndex];
carNode.s('shape3d', obj.name);
ht.Default.setDevicePixelRatio();
});
var polyline = createPath(dm, 300),
params = {
delay: 0,
duration: 10000,
easing: function(t){
return (t *= 2) < 1 ? 0.5 * t * t : 0.5 * (1 - (--t) * (t - 2));
},
action: function(v, t){
var length = g3d.getLineLength(polyline);
var offset = g3d.getLineOffset(polyline, length * v),
point = offset.point,
px = point.x,
py = point.y,
pz = point.z,
tangent = offset.tangent,
tx = tangent.x,
ty = tangent.y,
tz = tangent.z;
carNode.p3(px, py - 9, pz);
carNode.lookAt([px + tx, py + ty - 9, pz + tz], 'front');
},
finishFunc: function(){
ht.Default.startAnim(params);
}
},
carList = [ 'fordFocus', 'concept-sedan-01v2'],
result = [], carNode = new ht.Node();
carNode.setTag('carNode');
carList.forEach(function(name, index) {
ht.Default.loadObj('./objs/'+name+'/'+name+'.obj', './objs/'+name+'/'+name+'.mtl', {
cube: true,
center: true,
shape3d: name,
finishFunc: function(modelMap, array, rawS3) {
var k = 110 / rawS3[0];
rawS3 = rawS3.map(function(v) { return v * k; });
result[index] = {
'name' : name,
'modelMap' : modelMap,
'array' : array,
'rawS3' : rawS3
};
if (index === 0) {
var node = carNode;
node.s({
'wf.width' : 0,
'shape3d' : name,
'note.position' : 44,
'note' : 'DevicePixelRatio : ' + window.devicePixelRatio,
'note.face' : 'top',
'note.autorotate' : true,
'note.font' : '46px arial, sans-serif'
});
node.s3(rawS3);
node.r3(0, Math.PI, 0);
dm.add(node);
polyline.setElevation(rawS3[1] * 0.5 + 2);
ht.Default.startAnim(params);
}
}
});
});
};
var createPath = function(dm, radius) {
var polyline = new ht.Polyline();
polyline.setThickness(2);
polyline.s({
'shape.border.pattern': [16, 16],
'shape.border.color': 'rgba(0, 0, 0, 0)',
'shape3d.resolution': 300,
'3d.selectable': false
});
dm.add(polyline);
var cx = 0,
cy = radius * Math.PI * 0.5,
count = 500,
points = [{ x: radius, y: -cy, e: 0 }],
segments = [1];
for (var k = 0; k < count + 1; k++) {
var angle = k * Math.PI / count;
points.push({
x: cx + radius * Math.cos(angle),
y: cy + radius * Math.sin(angle),
e: 0
});
segments.push(2);
}
cy *= -1;
radius *= -1;
for (var k = 0; k < count + 1; k++) {
var angle = k * Math.PI / count;
points.push({
x: cx + radius * Math.cos(angle),
y: cy + radius * Math.sin(angle),
e: 0
});
segments.push(2);
}
polyline.setPoints(points);
polyline.setSegments(segments);
var shape = new ht.Shape();
shape.setPoints(points);
shape.setSegments(segments);
shape.s({
'top.visible' : false,
'bottom.image' : 'road',
'bottom.reverse.flip' : true,
'bottom.uv.scale' : [13, 1],
'back.visible' : false,
'front.reverse.flip' : true,
'3d.selectable': false
});
shape.setThickness(180);
shape.setTall(15);
shape.setClosePath(true);
dm.add(shape);
return polyline;
};
</script>
</head>
<body onload="init();">
</body>
</html>
来介绍下这次 Demo 中都用到的了 HT for Web 的那些技术。
首先是车子,车子并不是通过 HT for Web 生成的,而是通过专业的 3D 工具设计,然后导出 obj 和 mtl 文件,HT for Web 对 obj 和 mtl 文件进行解析,然后显示在 Graph3dView 中,更多具体的介绍可以查阅我么的 obj 文档:http://www.hightopo.com/guide/guide/plugin/obj/ht-obj-guide.html
在 obj 文档中,你会看到一个一个飞机的例子,飞机沿着设定好的路线飞行,你应该会想,这个寻路是怎么实现的呢?其实很简单,我们将路线切割成一个个很小很小的单元,然后根据算法依次获取到小单元的坐标设置到移动的物体上,这样物体就动起来了。
在 Demo 中,有一条很精致的马路,这条马路就是一个 Shape 节点,根据车的路径生成的马路,Shape 是一个六面体,因为首尾相连了,所以没有左右面,在这个例子中,我将马路的 back 和 top 面隐藏了,然后 bottom 面支持翻转,让 bottom 面的贴图显示在内表面上,这样马路就建成了。



相关推荐
内容概要:本文主要探讨了SNS单模无芯光纤的仿真分析及其在通信和传感领域的应用潜力。首先介绍了模间干涉仿真的重要性,利用Rsoft beamprop模块模拟不同模式光在光纤中的传播情况,进而分析光纤的传输性能和模式特性。接着讨论了光纤传输特性的仿真,包括损耗、色散和模式耦合等参数的评估。随后,文章分析了光纤的结构特性,如折射率分布、包层和纤芯直径对性能的影响,并探讨了镀膜技术对光纤性能的提升作用。最后,进行了变形仿真分析,研究外部因素导致的光纤变形对其性能的影响。通过这些分析,为优化光纤设计提供了理论依据。 适合人群:从事光纤通信、光学工程及相关领域的研究人员和技术人员。 使用场景及目标:适用于需要深入了解SNS单模无芯光纤特性和优化设计的研究项目,旨在提高光纤性能并拓展其应用场景。 其他说明:本文不仅提供了详细的仿真方法和技术细节,还对未来的发展方向进行了展望,强调了SNS单模无芯光纤在未来通信和传感领域的重要地位。
发那科USM通讯程序socket-set
嵌入式八股文面试题库资料知识宝典-WIFI.zip
源码与image
内容概要:本文详细探讨了物流行业中路径规划与车辆路径优化(VRP)的问题,特别是针对冷链物流、带时间窗的车辆路径优化(VRPTW)、考虑充电桩的车辆路径优化(EVRP)以及多配送中心情况下的路径优化。文中不仅介绍了遗传算法、蚁群算法、粒子群算法等多种优化算法的理论背景,还提供了完整的MATLAB代码及注释,帮助读者理解这些算法的具体实现。此外,文章还讨论了如何通过MATLAB处理大量数据和复杂计算,以得出最优的路径方案。 适合人群:从事物流行业的研究人员和技术人员,尤其是对路径优化感兴趣的开发者和工程师。 使用场景及目标:适用于需要优化车辆路径的企业和个人,旨在提高配送效率、降低成本、确保按时交付货物。通过学习本文提供的算法和代码,读者可以在实际工作中应用这些优化方法,提升物流系统的性能。 其他说明:为了更好地理解和应用这些算法,建议读者参考相关文献和教程进行深入学习。同时,实际应用中还需根据具体情况进行参数调整和优化。
嵌入式八股文面试题库资料知识宝典-C and C++ normal interview_8.doc.zip
内容概要:本文介绍了基于灰狼优化算法(GWO)的城市路径规划优化问题(TSP),并通过Matlab实现了该算法。文章详细解释了GWO算法的工作原理,包括寻找猎物、围捕猎物和攻击猎物三个阶段,并提供了具体的代码示例。通过不断迭代优化路径,最终得到最优的城市路径规划方案。与传统TSP求解方法相比,GWO算法具有更好的全局搜索能力和较快的收敛速度,适用于复杂的城市环境。尽管如此,算法在面对大量城市节点时仍面临运算时间和参数设置的挑战。 适合人群:对路径规划、优化算法感兴趣的科研人员、学生以及从事交通规划的专业人士。 使用场景及目标:①研究和开发高效的路径规划算法;②优化城市交通系统,提升出行效率;③探索人工智能在交通领域的应用。 其他说明:文中提到的代码可以作为学习和研究的基础,但实际应用中需要根据具体情况调整算法参数和优化策略。
嵌入式八股文面试题库资料知识宝典-Intel3.zip
嵌入式八股文面试题库资料知识宝典-2019京东C++.zip
嵌入式八股文面试题库资料知识宝典-北京光桥科技有限公司面试题.zip
内容概要:本文详细探讨了十字形声子晶体的能带结构和传输特性。首先介绍了声子晶体作为新型周期性结构在物理学和工程学中的重要地位,特别是十字形声子晶体的独特结构特点。接着从散射体的形状、大小、排列周期等方面分析了其对能带结构的影响,并通过理论计算和仿真获得了能带图。随后讨论了十字形声子晶体的传输特性,即它对声波的调控能力,包括传播速度、模式和能量分布的变化。最后通过大量实验和仿真验证了理论分析的正确性,并得出结论指出散射体的材料、形状和排列方式对其性能有重大影响。 适合人群:从事物理学、材料科学、声学等相关领域的研究人员和技术人员。 使用场景及目标:适用于希望深入了解声子晶体尤其是十字形声子晶体能带与传输特性的科研工作者,旨在为相关领域的创新和发展提供理论支持和技术指导。 其他说明:文中还对未来的研究方向进行了展望,强调了声子晶体在未来多个领域的潜在应用价值。
嵌入式系统开发_USB主机控制器_Arduino兼容开源硬件_基于Mega32U4和MAX3421E芯片的USB设备扩展开发板_支持多种USB外设接入与控制的通用型嵌入式开发平台_
e2b8a-main.zip
少儿编程scratch项目源代码文件案例素材-火柴人跑酷(2).zip
内容概要:本文详细介绍了HarmonyOS分布式远程启动子系统,该系统作为HarmonyOS的重要组成部分,旨在打破设备间的界限,实现跨设备无缝启动、智能设备选择和数据同步与连续性等功能。通过分布式软总线和分布式数据管理技术,它能够快速、稳定地实现设备间的通信和数据同步,为用户提供便捷的操作体验。文章还探讨了该系统在智能家居、智能办公和教育等领域的应用场景,展示了其在提升效率和用户体验方面的巨大潜力。最后,文章展望了该系统的未来发展,强调其在技术优化和应用场景拓展上的无限可能性。 适合人群:对HarmonyOS及其分布式技术感兴趣的用户、开发者和行业从业者。 使用场景及目标:①理解HarmonyOS分布式远程启动子系统的工作原理和技术细节;②探索该系统在智能家居、智能办公和教育等领域的具体应用场景;③了解该系统为开发者提供的开发优势和实践要点。 其他说明:本文不仅介绍了HarmonyOS分布式远程启动子系统的核心技术和应用场景,还展望了其未来的发展方向。通过阅读本文,用户可以全面了解该系统如何通过技术创新提升设备间的协同能力和用户体验,为智能生活带来新的变革。
嵌入式八股文面试题库资料知识宝典-C and C++ normal interview_1.zip
少儿编程scratch项目源代码文件案例素材-激光反弹.zip
内容概要:本文详细介绍了COMSOL相控阵检测技术在有机玻璃斜楔上放置16阵元进行工件内部缺陷检测的方法。首先阐述了相控阵检测技术的基本原理,特别是通过控制各阵元的激发时间和相位来实现声波的聚焦和扫描。接着,重点解析了横孔缺陷的反射接收波,解释了波的折射现象及其背后的物理原因。最后,通过实例展示了COMSOL模拟声波传播过程的成功应用,验证了该技术的有效性和准确性。 适合人群:从事固体力学、无损检测领域的研究人员和技术人员,尤其是对相控阵检测技术和COMSOL仿真感兴趣的读者。 使用场景及目标:适用于需要精确检测工件内部缺陷的研究和工业应用场景,旨在提高检测精度和效率,确保产品质量和安全。 其他说明:文中提到的声速匹配现象有助于理解波在不同介质间的传播特性,这对优化检测参数设置有重要意义。
少儿编程scratch项目源代码文件案例素材-极速奔跑者.zip
嵌入式八股文面试题库资料知识宝典-微软_interview.zip