
иљђиЗ™пЉЪhttp://blog.csdn.net/myarrow/article/details/7747733
 
дЄАгАБдїАдєИжШѓеОЯиѓ≠пЉЯ
¬†¬†¬†¬†¬†¬†¬†еОЯиѓ≠е∞±жШѓеПѓдї•зФ®glDrawArraysеТМglDrawElementsжЭ•ињЫи°МзФїеЫЊзЪДеЗ†дљХеѓєи±°гАВеОЯиѓ≠зФ±дЄАз≥їеИЧй°ґзВєжЭ•жППињ∞пЉМжѓПдЄ™й°ґзВєеМЕеРЂдљНзљЃгАБйҐЬиЙ≤гАБж≥ХзЇњеТМзЇєзРЖеЭРж†ЗгАВ
¬†¬†¬†¬†¬†¬† еОЯиѓ≠еМЕжЛђпЉЪзВєгАБзЇњгАБдЄЙиІТи°МгАВ
дЇМгАБеОЯиѓ≠з±їеЮЛ
1. дЄЙиІТ嚥еОЯиѓ≠з±їеЮЛ
¬†¬†¬†¬†¬† 1пЉЙGL_TRIANGLESпЉЪдЄЙиІТ嚥鰴зВєдЇТдЄНйЗНзФ®пЉМе¶Вй°ґзВє{V0пЉМV1пЉМV2пЉМV3пЉМV4пЉМV5}пЉМеИЩжППињ∞дЇЖ2дЄ™дЄЙиІТ嚥пЉМдЄЙиІТ嚥鰴зВєеИЖеИЂдЄЇпЉЪ(V0пЉМV1пЉМV2)еТМ(V3пЉМV4пЉМV5)гАВ
¬†¬†¬†¬†¬† 2пЉЙGL_TRIANGLE_STRIPпЉЪдЄЙиІТ嚥鰴зº襀йЗНзФ®пЉМзФїдЄАз≥їеИЧињЮжО•зЪДдЄЙиІТ嚥пЉМдЄЙиІТ嚥зЪДжЬАеРО2дЄ™й°ґзВєдЄЇдЄЛдЄАдЄ™дЄЙиІТ嚥зЪДеЙНйЭҐ2дЄ™й°ґзВєгАВе¶Вй°ґзВє{V0пЉМV1пЉМV2пЉМV3пЉМV4}пЉМеИЩжППињ∞дЇЖ3дЄ™дЄЙиІТ嚥пЉМдЄЙиІТ嚥鰴зВєеИЖеИЂдЄЇпЉЪ(V0пЉМV1пЉМV2)пЉМ(V2пЉМV1пЉМV3)<ж≥®жДПж≠§й°ЇеЇПпЉМеЇФиѓ•дЄЇйАЖжЧґйТИжЦєеРС>¬†еТМ (V2пЉМV3пЉМV4)гАВ
¬†¬†¬†¬†¬† 3пЉЙGL_TRIANGLE_FANпЉЪдЄЙиІТ嚥鰴зº襀йЗНзФ®пЉМзФїдЄАз≥їеИЧињЮжО•зЪДдЄЙиІТ嚥пЉМеЙНйЭҐдЄЙиІТ嚥зЪДзђђ1еТМ3дЄ™й°ґзВєпЉМдЄЇеРОйЭҐдЄЙиІТ嚥зЪДзђђ1еТМ2дЄ™й°ґзВєгАВе¶Вй°ґзВє{V0пЉМV1пЉМV2пЉМV3пЉМV4}пЉМеИЩжППињ∞дЇЖ3дЄ™дЄЙиІТ嚥пЉМдЄЙиІТ嚥鰴зВєеИЖеИЂдЄЇпЉЪ(V0пЉМV1пЉМV2)пЉМ (V0пЉМV2пЉМV3)еТМ(V0пЉМV3пЉМV4)гАВ
2. зЇњеОЯиѓ≠з±їеЮЛ
¬†¬†¬†¬†¬† 1пЉЙGL_LINESпЉЪзЇњзЪДй°ґзВєдЇТдЄНйЗНзФ®гАВе¶Вй°ґзВє{V0пЉМV1пЉМV2пЉМV3пЉМV4пЉМV5}пЉМеИЩжППињ∞дЇЖ3жЭ°зЇњпЉМзЇњй°ґзВєеИЖеИЂдЄЇпЉЪ(V0пЉМV1)пЉМ(V2пЉМV3)еТМ (V4пЉМV5)гАВ
¬†¬†¬†¬†¬† 2пЉЙGL_LINE_STRIPпЉЪзЇњзЪДй°ґзº襀йЗНзФ®пЉМеЙНйЭҐзЇњзЪДжЬАеРОдЄАдЄ™й°ґзВєдЄЇдЄЛдЄАжЭ°зЇњзЪДзђђдЄАдЄ™й°ґзВєгАВе¶Вй°ґзВє{V0пЉМV1пЉМV2пЉМV3}пЉМеИЩжППињ∞дЇЖ3жЭ°зЇњпЉМзЇњй°ґзВєеИЖеИЂдЄЇпЉЪ(V0пЉМV1)пЉМ(V1пЉМV2)еТМ (V2пЉМV3)гАВ
¬†¬†¬†¬†¬† 3пЉЙGL_LINE_LOOPпЉЪзЇњзЪДй°ґзº襀йЗНзФ®пЉМдЄОGL_LINE_STRIPз±їдЉЉпЉМеП™жШѓжЬАеРОдЄАжЭ°зЇњзЪДжЬАеРОдЄАдЄ™й°ґзВєдЄОзђђдЄАжЭ°зЇњзЪДзђђдЄАдЄ™й°ґзВєзЫЄињЮгАВе¶Вй°ґзВє{V0пЉМV1пЉМV2пЉМV3пЉМV4}пЉМеИЩжППињ∞дЇЖ5жЭ°зЇњпЉМзЇњй°ґзВєеИЖеИЂдЄЇпЉЪ(V0пЉМV1)пЉМ (V1пЉМV2)пЉМ (V2пЉМV3)пЉМ (V3пЉМV4)еТМ (V4пЉМV0)гАВ
¬†¬†¬†¬†¬† зЇњзЪДеЃљеЇ¶еПѓдї•йАЪињЗеЗљжХ∞вАЬvoid glLineWidth(GLfloat width)вАЭжЭ•иЃЊзљЃгАВ
3. й°ґзВєеОЯиѓ≠
¬†¬†¬†¬†¬†¬† GL_POINTSпЉЪеѓєжѓПдЄ™й°ґзВєињЫи°МзФїеЫЊгАВ
¬†¬†¬†¬†¬†¬†¬†ж≥®пЉЪз™ЧеП£еЭРж†ЗпЉИ0пЉМ0пЉЙдљНдЇОз™ЧеП£еЈ¶дЄЛиІТгАВиАМзВєзЪДеЭРж†ЗпЉИ0пЉМ0пЉЙдљНдЇОз™ЧеП£еЈ¶дЄКиІТгАВ
¬†¬†¬†¬†¬†¬† gl_PointSizeжШѓVertex ShaderдЄ≠зЪДдЄАдЄ™еЖЕеµМеПШйЗПпЉМgl_PointCoordжШѓFragment ShaderдЄ≠зЪДдЄАдЄ™еЖЕеµМеПШйЗПпЉМеЕґеАЉеПЦеАЉиМГеЫідЄЇпЉЪ[0.0пЉМ1.0]пЉМеєґдЄФдїОеЈ¶еИ∞еП≥жИЦдїОдЄКеИ∞дЄЛеЬ∞еҐЮеК†гАВ
дЄЙгАБзФїеЫЊеОЯиѓ≠
¬†¬†¬†¬†¬†¬† OpenGL ES 2.0жЬЙдї•дЄЛдЄ§дЄ™зФїеЫЊеОЯиѓ≠пЉЪ
¬†¬†¬†¬†¬†¬† 1пЉЙglDrawArrays
¬†¬†¬†¬†¬†¬† 2пЉЙglDrawElements.
1. glDrawArrays
     void glDrawArrays(GLenum mode, GLint first, GLsizei count)
¬†¬†¬†¬† вАҐ modeпЉЪжМЗеЃЪи¶БзФїзЪДеОЯиѓ≠з±їеЮЛпЉМжЬЙжХИеАЉе¶ВдЄЛпЉЪ
                GL_POINTS
                GL_LINES
                GL_LINE_STRIP
                GL_LINE_LOOP
                GL_TRIANGLES
                GL_TRIANGLE_STRIP
                GL_TRIANGLE_FAN
¬†¬†¬†¬† вАҐ firstпЉЪиµЈеІЛй°ґзВєеЬ®enabled vertex arraysдЄ≠зЪД糥еЉХ
¬†¬†¬†¬† вАҐ countпЉЪе∞Ж襀зФ®дЇОзФїеЫЊзЪДй°ґзВєдЄ™жХ∞
¬†¬†¬†¬† дЄЊдЊЛпЉЪglDrawArrays(GL_TRIANGLES, 0, 6)зФїдЇЖдЄ§дЄ™дЄЙиІТ嚥пЉМй°ґзВєзЪДй°ґзВєжХ∞зїД糥еЉХеИЖеИЂдЄЇпЉЪ(0, 1, 2)еТМ(3, 4, 5)гАВ
2. glDrawElements
    void glDrawElements(GLenum mode, GLsizei count,GLenum type, const GLvoid *indices)
¬†¬†¬†¬†вАҐ modeпЉЪжМЗеЃЪи¶БзФїзЪДеОЯиѓ≠з±їеЮЛпЉМжЬЙжХИеАЉе¶ВдЄЛпЉЪ
                GL_POINTS
                GL_LINES
                GL_LINE_STRIP
                GL_LINE_LOOP
                GL_TRIANGLES
                GL_TRIANGLE_STRIP
                GL_TRIANGLE_FAN
¬†¬†¬† вАҐ countпЉЪжМЗз§ЇеЬ®*indicesдЄ≠зЪДй°ґзº糥еЉХдЄ™жХ∞
¬†¬†¬†¬†¬† ¬†вАҐ typeпЉЪжМЗз§ЇеЬ®*indicesдЄ≠еЕГзі†жХ∞жНЃз±їеЮЛпЉМжЬЙжХИеАЉе¶ВдЄЛпЉЪ
                GL_UNSIGNED_BYTE
                GL_UNSIGNED_SHORT
¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬† GL_UNSIGNED_INTпЉИеПѓйАЙпЉМеП™жЬЙOES_element_index_uintжЙ©е±Х襀еЃЮзО∞жЧґпЉМжЙНеПѓдљњзФ®пЉЙ
¬†¬†¬†¬†вАҐ¬†indicesпЉЪе≠ШеВ®й°ґзº糥еЉХзЪДжХ∞зїДжИЦжМЗйТИ
3.¬†glDrawArrays &glDrawElementsеРДиЗ™зФ®ж≠¶дєЛеЬ∞
¬†¬†¬†¬†¬†¬†¬† е¶ВжЮЬEnbaled Vertex ArrayдЄ≠зЪДй°ґзВєдЄН襀е§ЪдЄ™еОЯиѓ≠жЙАеЕ±дЇЂпЉМеИЩдљњзФ®glDrawArraysиЊГйЂШжХИпЉМеЫ†дЄЇзЬБеОїдЇЖй°ґзº糥еЉХжХ∞зїДпЉЫеР¶еИЩдљњзФ®glDrawElementsйЂШжХИпЉМеЫ†дЄЇеРМдЄАдЄ™й°ґзВєеЬ®Enabled Vertex ArrayдЄ≠еП™жЬЙдЄАдїљжХ∞жНЃпЉМдЄНе≠ШеЬ®е§ЪдЄ™жХ∞жНЃcopyпЉМиКВзЬБдЇЖеЖЕе≠Шз©ЇйЧігАВ
¬†¬†¬†¬†¬†¬†¬† дЄЊдЊЛе¶ВдЄЛпЉИзФїдЄАдЄ™зЂЛжЦєдљУпЉЙпЉЪ

1пЉЙ дљњзФ®glDrawArraysзЪДдї£з†Бе¶ВдЄЛпЉЪ
- #define VERTEX_POS_INDX 0  
- #define NUM_FACES 6  
- GLfloat¬†vertices[]¬†=¬†{¬†вА¶¬†};¬†//¬†(x,¬†y,¬†z)¬†per¬†vertex¬†¬†
- glEnableVertexAttribArray(VERTEX_POS_INDX);  
- glVertexAttribPointer(VERTEX_POS_INDX, 3, GL_FLOAT, GL_FALSE,0, vertices);  
- for (i=0; i<NUM_FACES; i++)  
- {  
-     glDrawArrays(GL_TRIANGLE_FAN, first, 4);  
-     first += 4;  
- }  
-   
- //or glDrawArrays(GL_TRIANGLES, 0, 36);  
ж≥®пЉЪжАїеЕ±8дЄ™й°ґзВєпЉМеНідњЭе≠ШдЇЖ24дЄ™й°ґзВєжИЦ36дЄ™й°ґзВєзЪДжХ∞жНЃгАВ
2пЉЙдљњзФ®glDrawElementsзЪДдї£з†Бе¶ВдЄЛпЉЪ
- #define VERTEX_POS_INDX 0  
- GLfloat¬†vertices[]¬†=¬†{¬†вА¶¬†};//¬†(x,¬†y,¬†z)¬†per¬†vertex¬†¬†
- GLubyte indices[36] = { 0, 1, 2, 0, 2, 3,  
-                         0, 3, 4, 0, 4, 5,  
-                         0, 5, 6, 0, 6, 1,  
-                         7, 6, 1, 7, 1, 2,  
-                         7, 4, 5, 7, 5, 6,  
-                         7, 2, 3, 7, 3, 4 };  
- glEnableVertexAttribArray(VERTEX_POS_INDX);  
- glVertexAttribPointer(VERTEX_POS_INDX, 3, GL_FLOAT, GL_FALSE,0, vertices);  
- glDrawElements(GL_TRIANGLES, sizeof(indices)/sizeof(GLubyte),GL_UNSIGNED_BYTE, indices);  
4.¬†жАїзїУ
¬†¬†¬†¬†¬†¬†¬†еП™и¶БжЬЙй°ґзВєйЗНзФ®пЉМдљњзФ®glDrawElements¬†зЪДжАІиГљжѓФglDrawArraysи¶Бе•љпЉМеЫ†дЄЇдЄНдїЕCPUдЄОGPUдєЛйЧідЉ†йАТжХ∞жНЃзЪДеЖЕе≠ШеЄ¶еЃљжЫіе∞ПпЉМдЄФеЬ®GPUдЄ≠еН†зФ®зЪДеЖЕе≠ШдєЯжЫіе∞СгАВ
еЫЫгАБеОЯиѓ≠зїДи£ЕпЉИPrimitive AssemblyпЉЙ
¬†¬†¬†¬†¬†¬† OpenGL ES 2.0еОЯиѓ≠зїДи£ЕйШґжЃµе¶ВдЄЛеЫЊжЙАз§ЇпЉЪ
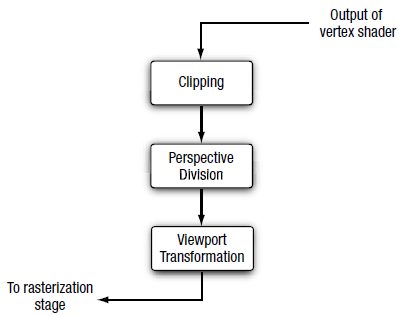
1. еЭРж†Зз≥їзїЯ

2. и£БеЙ™дљУ(clip volume)
¬†¬†¬† и£БеЙ™дљУзФ±ињСгАБињЬгАБеЈ¶гАБеП≥гАБдЄКгАБдЄЛеЕ±6дЄ™и£БеЙ™йЭҐзїДжИРгАВе¶ВдЄЛеЫЊжЙАз§ЇпЉЪ

¬†¬†¬†¬†¬† еЬ®clippingйШґжЃµпЉМжѓПдЄ™еОЯиѓ≠йÚ襀и£БеЙ™дљУињЫи°Ми£БеЙ™гАВеєґеѓєжѓПзІНеОЯиѓ≠жЙІи°Ме¶ВдЄЛжУНдљЬжЭ•ињЫи°Ми£БеЙ™пЉЪ
¬†¬†¬†¬†¬† 1пЉЙClipping triangles
¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬† вАҐ е¶ВжЮЬеЕ®йГ®еЬ®и£БеЙ™дљУеЖЕпЉМдїАдєИйГљдЄНеБЪ
¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬† вАҐ е¶ВжЮЬеЕ®йГ®дЄНеЬ®и£БеЙ™дљУеЖЕпЉМеИЩдЄҐеЉГ
¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†вАҐ е¶ВжЮЬйГ®еИЖеЬ®и£БеЙ™дљУеЖЕпЉМеИЩдЇІзФЯжЦ∞зЪДй°ґзº庴嚥жИРдЄЙиІТ嚥FAN
¬†¬†¬†¬†¬† 2пЉЙClipping lines¬†
¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬† вАҐ е¶ВжЮЬеЕ®йГ®еЬ®и£БеЙ™дљУеЖЕпЉМдїАдєИйГљдЄНеБЪ
¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬† вАҐ е¶ВжЮЬеЕ®йГ®дЄНеЬ®и£БеЙ™дљУеЖЕпЉМеИЩдЄҐеЉГ
¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬† вАҐ е¶ВжЮЬйГ®еИЖеЬ®и£БеЙ™дљУеЖЕпЉМеИЩдЇІзФЯжЦ∞зЪДй°ґзº庴嚥жИРжЦ∞зЪДLINE
¬†¬†¬†¬†¬† 3пЉЙClipping point sprites
¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬† вАҐ е¶ВжЮЬеЕ®йГ®еЬ®и£БеЙ™дљУеЖЕпЉМдїАдєИйГљдЄНеБЪ
¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬† вАҐ е¶ВжЮЬеЕ®йГ®дЄНеЬ®и£БеЙ™дљУеЖЕпЉМеИЩдЄҐеЉГ
3. йАПиІЖйЩ§ж≥ХпЉИPerspectiveDivisionпЉЙ¬†
¬†¬†¬†¬†¬†¬†¬† еЃГзЪДзЫЃж†ЗжШѓжККи£БеЙ™еЭРж†ЗеПШдЄЇељТдЄАеМЦиЃЊе§ЗеЭРж†ЗпЉМеЕґеПЦеАЉиМГеЫідЄЇпЉЪ[-1пЉМ1]гАВеЕґеЃЮзО∞жЦєж≥ХдЄЇжККеЭРж†ЗзЪДжѓПдЄ™еИЖйЗПйЩ§дї•WcгАВи£БеЙ™еЭРж†З(Xc,Yc,Zc,Wc)¬†зїПињЗйАПиІЖйЩ§ж≥Х(Xc/Wc)пЉМ(Yc/Wc)пЉМ(Zc/Wc)еИЩеПШжИРдЇЖељТдЄАеМЦиЃЊе§ЗеЭРж†З(XdпЉМYdпЉМZd)гАВ
4. иІЖеП£еПШжНҐпЉИViewport TransformationпЉЙ
¬†¬†¬†¬†¬†¬†¬† еЃГжККељТдЄАеМЦиЃЊе§ЗеЭРж†З(XdпЉМYdпЉМZd)еПШжНҐдЄЇз™ЧеП£еЭРж†ЗжИЦе±ПеєХеЭРж†З(XwпЉМYwпЉМZw)гАВ
1пЉЙиІЖеП£еПШжНҐиІЖеП£йАЪињЗдї•дЄЛAPIиЃЊзљЃпЉЪ
        void glViewport(GLint x, GLint y, GLsizei w, GLsizei h)
¬†¬†¬†¬†¬†¬†¬†¬†вАҐ¬†x, yпЉЪжМЗжШОиІЖеП£еЈ¶дЄЛиІТе±ПеєХеЭРж†ЗпЉИдї•еГПзі†дЄЇеНХдљНпЉЙ
¬†¬†¬†¬†¬†¬†¬†¬†вАҐ¬†w, hпЉЪжМЗжШОиІЖеП£зЪДеЃљеЇ¶еТМйЂШеЇ¶пЉИдї•еГПзі†дЄЇеНХдљНпЉЙ¬†¬†¬†¬†¬†
2пЉЙиІЖеП£еПШжНҐжЈ±еЇ¶йАЪињЗдї•дЄЛAPIиЃЊзљЃпЉЪ¬†¬†¬†¬†
        void glDepthRange(GLclampf n, GLclampf f)
¬†¬†¬†¬†¬†¬†¬†¬†вАҐ¬†n, fпЉЪжМЗжШОи¶Бж±ВзЪДжЈ±еЇ¶иМГеЫігАВйїШиЃ§еАЉпЉЪn=0.0пЉМf=1.0пЉМеАЉзЪДиМГеЫідЄЇ[0.0пЉМ1.0]гАВ¬†¬†¬†¬†¬†¬†¬†¬†¬†
3пЉЙиІЖеП£еПШжНҐжЦєж≥ХдЄЇпЉЪ
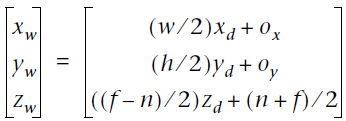
¬†¬†¬†¬†¬† Ox = (x + w)/2пЉМOy = (y + h)/2пЉМn еТМ f и°®з§Їи¶Бж±ВзЪДжЈ±еЇ¶иМГеЫігАВ
  
дЇФгАБеЕЙж†ЕеМЦпЉИRasterizationпЉЙ

¬†¬†¬†¬†¬†¬†¬† еЕЙж†ЕеМЦиОЈеПЦжѓПдЄ™еОЯиѓ≠пЉИе¶ВпЉЪзВєгАБзЇњгАБдЄЙиІТ嚥пЉЙпЉМзДґеРОдЄЇињЩдЄ™еОЯиѓ≠дЇІзФЯеРИйАВзЪДFragmentгАВдЄАдЄ™Fragmentи°®з§ЇеЬ®е±ПеєХз©ЇйЧідЄ≠зЪДдЄАдЄ™еГПзі†дљНзљЃ(xпЉМy)пЉМдЄФfragmentжХ∞жНЃе∞Ж襀Fragment Shaderе§ДзРЖдї•дЇІзФЯдЄАдЄ™Fragment ColorгАВ
¬†еЕ≠гАБйАЙжЛ©пЉИCullingпЉЙ
¬†¬†¬†¬†¬†¬†¬† еЬ®дЄЙиІТ嚥襀еЕЙж†ЕеМЦдєЛеЙНпЉМжИСйЬАи¶Бз°ЃеЃЪеУ™дЇЫйЭҐеѓєиІВеѓЯиАЕпЉМеУ™дЇЫйЭҐиГМеѓєиІВеѓЯиАЕгАВCullingжУНдљЬдЄҐеЉГеУ™дЇЫиГМеѓєиІВеѓЯиАЕзЪДйЭҐпЉМдїОиАМеЕЙж†ЕеМЦињЩдЇЫзЬЛдЄНиІБзЪДдЄЙиІТ嚥пЉМдїОиАМиКВзЇ¶дЇЖGPUзЪДжЧґйЧіпЉМеєґжПРйЂШдЇЖGPUзЪДжАІиГљгАВзЫЄеЕ≥еЗљжХ∞е¶ВдЄЛпЉЪ¬†¬†¬†
¬†¬†¬†¬†¬†¬†¬† 1пЉЙvoid glFrontFace(GLenum dir)
¬†¬†¬†¬†¬†¬†¬† вАҐ dirпЉЪжМЗз§ЇйЭҐеѓєиІВеѓЯиАЕзЪДдЄЙиІТ嚥зЪДжЦєеРСпЉИGL_CW<й°ЇжЧґйТИ>жИЦGL_CCW<йАЖжЧґйТИ>)пЉМйїШиЃ§еАЉдЄЇпЉЪGL_CCWгАВ
¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†¬†CW: ClockwiseпЉМCCWпЉЪCounter-Clockwise
¬†¬†¬†¬†¬†¬†¬† 2пЉЙvoid glCullFace(GLenum mode)
¬†¬†¬†¬†¬†¬†¬†¬†вАҐ modeпЉЪжМЗз§ЇдЄЙиІТ嚥зЪДеУ™дЄ™йݥ襀йАЙжЛ©пЉИGL_FRONTгАБGL_BACKгАБGL_FRONT_AND_BACKпЉЙпЉМйїШиЃ§еАЉжШѓGL_BACKгАВ
 
¬†¬†¬†¬†¬†¬†¬† 3пЉЙvoid glEnable(GLenum cap)
              void glDisable(GLenum cap)
¬†¬†¬†¬†¬†¬†¬† вАҐ capпЉЪиЃЊзљЃдЄЇGL_CULL_FACEпЉМеИЭеІЛжЧґпЉМCulling襀disabledжОЙдЇЖгАВ



зЫЄеЕ≥жО®иНР
- **иЃЊзљЃ**пЉЪиЃ≤иІ£еЬ®еЕЙж†ЕеМЦињЗз®ЛдЄ≠е¶ВдљХз°ЃеЃЪжѓПдЄ™еГПзі†зЪДйҐЬиЙ≤еТМеЕґдїЦе±ЮжАІгАВ #### зђђдЄГйГ®еИЖпЉЪZ/Stencilе§ДзРЖ - **жЈ±еЇ¶жµЛиѓХ**пЉЪиІ£йЗКе¶ВдљХйАЪињЗжЈ±еЇ¶зЉУеЖ≤еМЇжЭ•з°ЃеЃЪеУ™дЇЫеГПзі†жШѓеПѓиІБзЪДгАВ - **StencilжµЛиѓХ**пЉЪдїЛзїНStencilзЉУеЖ≤еМЇзЪД...
жЬАеРОпЉМеЕЙж†ЕеМЦпЉИRasterizationпЉЙйШґжЃµе∞Жй°ґзВєдњ°жБѓиљђжНҐдЄЇеГПзі†еАЉпЉМеєґжЙІи°МжЈ±еЇ¶жµЛиѓХпЉИDepth TestпЉЙгАБзЇєзРЖжШ†е∞ДпЉИTexture MappingпЉЙеТМеЕґдїЦзЭАиЙ≤жУНдљЬпЉМжЬАзїИеРИжИРеЗЇдЄАеєЕеЃМжХізЪДеЫЊеГПгАВ #### GPUзЪДеПСе±ХиґЛеКњ йЪПзЭАжЧґйЧізЪДжО®зІїпЉМGPUзЪД...
еЖЕеЃєж¶Ви¶БпЉЪжЬђжЦЗжОҐиЃ®дЇЖж®°з≥КжХЕйЪЬж†СпЉИFFTAпЉЙеЬ®еЈ•дЄЪжОІеИґз≥їзїЯеПѓйЭ†жАІеИЖжЮРдЄ≠зЪДеЇФзФ®пЉМиІ£еЖ≥дЇЖдЉ†зїЯжХЕйЪЬж†СжЦєж≥ХжЧ†ж≥Хе§ДзРЖдЄНз°ЃеЃЪжХ∞жНЃзЪДйЧЃйҐШгАВжЦЗдЄ≠дїЛзїНдЇЖж®°з≥КжХ∞зЪДеЯЇжЬђж¶ВењµеТМеЃЮзО∞жЦєеЉПпЉМе¶ВдЄЙиІТж®°з≥КжХ∞еТМ楃嚥殰з≥КжХ∞пЉМеєґе±Хз§ЇдЇЖе¶ВдљХзФ®PythonеЃЮзО∞ж®°з≥КдЄОйЧ®гАБжИЦйЧ®ињРзЃЧдї•еПКз≥їзїЯжХЕйЪЬзОЗзЪДиЃ°зЃЧгАВж≠§е§ЦпЉМињШиѓ¶зїЖиЃ≤иІ£дЇЖжЬАе∞ПеЙ≤йЫЖзЪДжЯ•жЙЊжЦєж≥ХгАБеНХеЕГйЗНи¶БеЇ¶зЪДиЃ°зЃЧпЉМеєґйАЪињЗеЃЮдЊЛиѓіжШОдЇЖињЩдЇЫжЦєж≥ХзЪДеЃЮйЩЕеЇФзФ®еЬЇжЩѓгАВжЬАеРОпЉМиЃ®иЃЇдЇЖж®°з≥КињРзЃЧеЬ®е§ДзРЖиѓ≠и®АеПШйЗПжЦєйЭҐзЪДдЉШеКњпЉМеЉЇи∞ГдЇЖеЬ®еПѓйЭ†жАІеИЖжЮРдЄ≠е§ДзРЖж®°з≥КжАІеТМдЉШеМЦиЃ°зЃЧжХИзОЗзЪДйЗНи¶БжАІгАВ йАВеРИдЇЇзЊ§пЉЪдїОдЇЛеЈ•дЄЪжОІеИґз≥їзїЯиЃЊиЃ°гАБзїіжК§зЪДжКАжЬѓдЇЇеСШпЉМдї•еПКеѓєж®°з≥КжХ∞е≠¶еТМеПѓйЭ†жАІеИЖжЮРжДЯеЕіиґ£зЪДзІСз†ФдЇЇеСШгАВ дљњзФ®еЬЇжЩѓеПКзЫЃж†ЗпЉЪйАВзФ®дЇОйЬАи¶БиѓДдЉ∞е§НжЭВз≥їзїЯеПѓйЭ†жАІзЪДеЬЇеРИпЉМзЙєеИЂжШѓеЬ®йЭҐеѓєдЄНз°ЃеЃЪжХ∞жНЃжЧґпЉМиГље§ЯжПРдЊЫжЫіеЗЖз°ЃзЪДй£ОйЩ©иѓДдЉ∞гАВзЫЃж†ЗжШѓеЄЃеК©еЈ•з®ЛеЄИжЫіе•љеЬ∞зРЖиІ£еТМйҐДжµЛз≥їзїЯжХЕйЪЬпЉМдїОиАМеИґеЃЪжЬЙжХИзЪДйҐДйШ≤жО™жЦљгАВ еЕґдїЦиѓіжШОпЉЪжЦЗдЄ≠жПРдЊЫзЪДдї£з†БзЙЗжЃµеТМжЦєж≥ХеПѓзФ®дЇОеИЭж≠•жЦєж°Ий™МиѓБеТМжКАжЬѓжΥ糥пЉМдљЖеЬ®еЃЮйЩЕеЈ•з®Лй°єзЫЃдЄ≠ињШйЬАињЫдЄАж≠•дЉШеМЦеТМеЃМеЦДгАВ
еЖЕеЃєж¶Ви¶БпЉЪжЬђжЦЗиѓ¶зїЖжОҐиЃ®дЇЖеПМй¶Ий£ОеКЫеПСзФµжЬЇпЉИDFIGпЉЙеЬ®SimulinkзОѓеҐГдЄЛзЪДеїЇж®°жЦєж≥ХеПКеЕґеЬ®дЄНеРМй£ОйАЯжЭ°дїґдЄЛзЪДзФµжµБдЄОзФµеОЛж≥ҐељҐзЙєеЊБгАВй¶ЦеЕИдїЛзїНдЇЖDFIGзЪДеЯЇжЬђеОЯзРЖпЉМеН≥еЃЪе≠РзЫіжО•жО•еЕ•зФµзљСпЉМиљђе≠РйАЪињЗеПМеРСеПШжµБеЩ®ињЮжО•зФµзљСзЪДзЙєзВєгАВжО•зЭАйШРињ∞дЇЖSimulinkж®°еЮЛзЪДеЕЈдљУжР≠еїЇж≠•й™§пЉМеМЕжЛђй£ОеКЫжЬЇж®°еЮЛгАБдЉ†еК®з≥їзїЯж®°еЮЛгАБDFIGжЬђдљУж®°еЮЛеТМеПШжµБеЩ®ж®°еЮЛзЪДеїЇзЂЛгАВжЦЗдЄ≠еЉЇи∞ГдЇЖеПШжµБеЩ®жОІеИґзЃЧж≥ХзЪДйЗНи¶БжАІпЉМзЙєеИЂжШѓеЬ®еЇФеѓєй£ОйАЯеПШеМЦжЧґпЉМйАЪињЗеЃЮжЧґи∞ГжХіиљђе≠РдЊІзЪДзФµеОЛеТМзФµжµБпЉМз°ЃдњЭзФµжµБеТМзФµеОЛж≥ҐељҐзЪДиЙѓе•љзЙєжАІгАВж≠§е§ЦпЉМжЦЗзЂ†ињШиЃ®иЃЇдЇЖж®°еЮЛдЄ≠зЪДеЕ≥йФЃжКАжЬѓеТМжМСжИШпЉМе¶Виљђе≠РзФµжµБзОѓжОІеИґз≠ЦзХ•гАБдљОзФµеОЛз©њиґКжАІиГљгАБзЫіжµБжѓНзЇњзФµеОЛиДЙеК®з≠ЙйЧЃйҐШпЉМеєґжПРдЊЫдЇЖеЕЈдљУзЪДиІ£еЖ≥жЦєж°ИеТМжКАжЬѓзїЖиКВгАВжЬАзїИпЉМйАЪињЗеѓєжХЕйЪЬеЈ•еЖµзЪДдїњзЬЯжµЛиѓХпЉМй™МиѓБдЇЖжЙАеїЇж®°еЮЛзЪДжЬЙжХИжАІеТМдЉШиґКжАІгАВ йАВзФ®дЇЇзЊ§пЉЪдїОдЇЛй£ОеКЫеПСзФµз†Фз©ґзЪДжКАжЬѓдЇЇеСШгАБйЂШж†°зЫЄеЕ≥дЄУдЄЪеЄИзФЯгАБеѓєзФµеКЫзФµе≠РжОІеИґз≥їзїЯжДЯеЕіиґ£зЪДеЈ•з®ЛжКАжЬѓдЇЇеСШгАВ дљњзФ®еЬЇжЩѓеПКзЫЃж†ЗпЉЪйАВзФ®дЇОеЄМжЬЫжЈ±еЕ•дЇЖиІ£DFIGеЈ•дљЬеОЯзРЖгАБжОМжП°SimulinkеїЇж®°жКАиГљзЪДз†Фз©ґдЇЇеСШпЉЫжЧ®еЬ®еЄЃеК©иѓїиАЕзРЖиІ£DFIGеЬ®дЄНеРМй£ОйАЯжЭ°дїґдЄЛзЪДеК®жАБеУНеЇФжЬЇеИґпЉМдЄЇдЉШеМЦй£ОеКЫеПСзФµз≥їзїЯзЪДжОІеИґз≠ЦзХ•жПРдЊЫзРЖиЃЇдЊЭжНЃеТМжКАжЬѓжФѓжМБгАВ еЕґдїЦиѓіжШОпЉЪжЦЗзЂ†дЄНдїЕжПРдЊЫдЇЖиѓ¶зїЖзЪДзРЖиЃЇиІ£йЗКпЉМињШйЩДжЬЙе§ІйЗПMatlab/Simulinkдї£з†БзЙЗжЃµпЉМдЊњдЇОиѓїиАЕињЫи°МеЃЮиЈµжУНдљЬгАВеРМжЧґпЉМйТИеѓєдЄАдЇЫеЄЄиІБйЧЃйҐШзїЩеЗЇдЇЖеЃЮзФ®зЪДи∞ГиѓХжКАеЈІпЉМжЬЙеК©дЇОжПРйЂШдїњзЬЯзЪДеЗЖз°ЃжАІеТМеПѓйЭ†жАІгАВ
еЖЕеЃєж¶Ви¶БпЉЪжЬђжЦЗиѓ¶зїЖдїЛзїНдЇЖеЯЇдЇОи•њйЧ®е≠РS7-200 PLCеТМзїДжАБзОЛиљѓдїґжЮДеїЇзЪДеЕЂе±ВзԵ楃жОІеИґз≥їзїЯгАВй¶ЦеЕИйШРињ∞дЇЖз≥їзїЯзЪДз°ђдїґйЕНзљЃпЉМеМЕжЛђPLCзЪДIOеИЖйЕНз≠ЦзХ•пЉМе¶ВиЊУеЕ•иЊУеЗЇдњ°еПЈзЪДеЕЈдљУеИЖйЕНеПКеЕґйЗНи¶БжАІгАВжО•зЭАжЈ±еЕ•жОҐиЃ®дЇЖ楃嚥еЫЊзЉЦз®ЛйАїиЊСпЉМжґµзЫЦе§ЦеСЉдњ°еПЈе§ДзРЖгАБиљњеОҐињРеК®жОІеИґдї•еПКж•Ље±ВеИ§жЦ≠з≠ЙеЕ≥йФЃзОѓиКВгАВйЪПеРОиЃ≤иІ£дЇЖзїДжАБзОЛзЪДзФїйЭҐиЃЊиЃ°пЉМеМЕжЛђеК®зФїжХИжЮЬзЪДеЃЮзО∞жЦєж≥ХпЉМе¶Вж•Ље±ВжМЙйТЃзїСеЃЪгАБиљњеОҐзІїеК®еК®зФїеТМйЧ®еЉАеРИжХИжЮЬз≠ЙгАВжЬАеРОеИЖдЇЂдЇЖдЄАдЇЫи∞ГиѓХзїПй™МеТМж≥®жДПдЇЛй°єпЉМе¶Вж®°жЛЯеЫ∞дЇЇеЬЇжЩѓгАБйШ≤жКЦйАїиЊСгАБжО•зЇњиЙЇжЬѓз≠ЙгАВ йАВеРИдЇЇзЊ§пЉЪдїОдЇЛиЗ™еК®еМЦжОІеИґйҐЖеЯЯзЪДеЈ•з®ЛеЄИеТМжКАжЬѓдЇЇеСШпЉМе∞§еЕґжШѓеѓєPLCзЉЦз®ЛеТМзїДжАБиљѓдїґжЬЙдЄАеЃЪеЯЇз°АзЪДдЇЇзЊ§гАВ дљњзФ®еЬЇжЩѓеПКзЫЃж†ЗпЉЪйАВзФ®дЇОйЬАи¶БиЃЊиЃ°еТМеЃЮжЦље∞ПеЮЛзԵ楃жОІеИґз≥їзїЯзЪДеЈ•з®Лй°єзЫЃгАВдЄїи¶БзЫЃж†ЗжШѓеЄЃеК©иѓїиАЕжОМжП°PLCзЉЦз®ЛжКАеЈІгАБзїДжАБзФїйЭҐиЃЊиЃ°жЦєж≥Хдї•еПКз≥їзїЯиБФи∞ГзїПй™МпЉМдїОиАМжПРйЂШй°єзЫЃзЪДжИРеКЯзОЗгАВ еЕґдїЦиѓіжШОпЉЪжЦЗдЄ≠жПРдЊЫдЇЖиѓ¶зїЖзЪДдї£з†БзЙЗжЃµеТМи∞ГиѓХжКАеЈІпЉМжЬЙеК©дЇОиѓїиАЕжЫіе•љеЬ∞зРЖиІ£еТМеЇФзФ®зЫЄеЕ≥зЯ•иѓЖзВєгАВж≠§е§ЦпЉМињШеЉЇи∞ГдЇЖеЃЙеЕ®жАІеТМеПѓйЭ†жАІжЦєйЭҐзЪДиАГйЗПпЉМе¶ВжА•еБЬжМЙйТЃзЪДж≠£з°ЃжО•еЕ•еТМз°ђдїґдЇТйФБиЃЊиЃ°з≠ЙгАВ
еЖЕеЃєж¶Ви¶БпЉЪжЬђжЦЗдїЛзїНдЇЖе¶ВдљХе∞ЖCarSimзЪДеК®еКЫе≠¶ж®°еЮЛдЄОSimulinkзЪДжЩЇиГљзЃЧж≥ХзЫЄзїУеРИпЉМеИ©зФ®ж®°еЮЛйҐДжµЛжОІеИґ(MPC)еЃЮзО∞иљ¶иЊЖзЪДжЩЇиГљиґЕиљ¶жНҐйБУгАВдЄїи¶БеЖЕеЃєеМЕжЛђMPCжОІеИґеЩ®зЪДиЃЊиЃ°гАБиЈѓеЊДиІДеИТзЃЧж≥ХгАБиБФеРИдїњзЬЯзЪДйЕНзљЃи¶БзВєдї•еПКеЃЮйЩЕеЇФзФ®жХИжЮЬгАВжЦЗдЄ≠жПРдЊЫдЇЖиѓ¶зїЖзЪДдї£з†БзЙЗжЃµеТМжКАжЬѓзїЖиКВпЉМе¶ВжЭГйЗНзЯ©йШµиЃЊзљЃгАБиЈѓеЊДиЈЯиЄ™зЫЃж†ЗеЗљжХ∞гАБеЃЙеЕ®иґЕиљ¶жЭ°дїґеИ§жЦ≠з≠ЙгАВж≠§е§ЦпЉМињШеЉЇи∞ГдЇЖдїњзЬЯињЗз®ЛдЄ≠йЬАи¶Бж≥®жДПзЪДеЕ≥йФЃеПВжХ∞йЕНзљЃпЉМе¶ВдїњзЬЯж≠•йХњгАБжПТеАЉиЃЊзљЃз≠ЙпЉМдї•з°ЃдњЭз≥їзїЯзЪДз®≥еЃЪжАІеТМеЗЖз°ЃжАІгАВ йАВеРИдЇЇзЊ§пЉЪдїОдЇЛиЗ™еК®й©Њй©ґз†Фз©ґзЪДжКАжЬѓдЇЇеСШгАБж±љиљ¶еЈ•з®ЛйҐЖеЯЯзЪДз†Фз©ґдЇЇеСШгАБеѓєиБФеРИдїњзЬЯжДЯеЕіиґ£зЪДеЉАеПСиАЕгАВ дљњзФ®еЬЇжЩѓеПКзЫЃж†ЗпЉЪйАВзФ®дЇОйЬАи¶БињЫи°МиЗ™еК®й©Њй©ґиљ¶иЊЖи°МдЄЇж®°жЛЯзЪДз†Фз©ґжЬЇжЮДеТМдЉБдЄЪпЉМжЧ®еЬ®жПРйЂШиґЕиљ¶жНҐйБУзЪДеЃЙеЕ®жАІеТМжХИзОЗпЉМдЄЇиЗ™еК®й©Њй©ґжКАжЬѓз†ФеПСжПРдЊЫзРЖиЃЇжФѓжМБеТМжКАжЬѓй™МиѓБгАВ еЕґдїЦиѓіжШОпЉЪйЪПеМЕжПРдЊЫзЪДж°ИдЊЛжЦЗдїґеЈ≤и∞Ге•љжЙАжЬЙеПВжХ∞пЉМеПѓдї•зЫіжО•еѓЉеЕ•еєґињРи°МпЉМеЄЃеК©зФ®жИЈењЂйАЯдЄКжЙЛгАВжЦЗдЄ≠жПРеИ∞зЪДеЕЈдљУеПВжХ∞еТМйЕНзљЃжЦєж≥ХеѓєдЇОеИЭе≠¶иАЕйЭЮеЄЄеПЛе•љпЉМиГље§ЯжШЊиСЧйЩНдљОеЕ•йЧ®йЧ®жІЫгАВ
еМЕжЛђпЉЪжЇРз®ЛеЇПеЈ•з®ЛжЦЗдїґгАБProteusдїњзЬЯеЈ•з®ЛжЦЗдїґгАБиЃЇжЦЗжЭРжЦЩгАБйЕНе•ЧжКАжЬѓжЙЛеЖМз≠Й 1гАБйЗЗзФ®51еНХзЙЗжЬЇдљЬдЄЇдЄїжОІпЉЫ 2гАБйЗЗзФ®AD0809(дїњзЬЯ0808)ж£АжµЛ"PHгАБж∞®гАБдЇЪз°ЭйЕЄзЫРгАБз°ЭйЕЄзЫР"ж®°жЛЯдЉ†жДЯпЉЫ 3гАБйЗЗзФ®DS18B20ж£АжµЛжЄ©еЇ¶пЉЫ 4гАБйЗЗзФ®1602жґ≤жЩґжШЊз§Їж£АжµЛеАЉпЉЫ 5гАБж£АжµЛеАЉеРМжЧґдЄ≤еП£дЄКдЉ†пЉМи∞ГиѓХеК©жЙЛзЫСзЬЛпЉЫ 6гАБдЇ¶еПѓйАЪињЗдЄ≤еП£жМЗдї§еѓєеК†зГ≠еЩ®гАБеИґж∞ІжЬЇињЫи°МжОІеИґпЉЫ
еЖЕеЃєж¶Ви¶БпЉЪжЬђжЦЗиѓ¶зїЖдїЛзїНдЇЖеПМй¶Иж∞Єз£Бй£ОзФµжЬЇзїДеєґзљСдїњзЬЯж®°еЮЛеПКеЕґзЯ≠иЈѓжХЕйЪЬеИЖжЮРжЦєж≥ХгАВй¶ЦеЕИжЮДеїЇдЇЖдЄАдЄ™9MWй£ОзФµеЬЇж®°еЮЛпЉМзФ±6еП∞1.5MWеПМй¶Ий£ОжЬЇжЮДжИРпЉМйАЪињЗеНЗеОЛеПШеОЛеЩ®ињЮжО•еИ∞120kVзФµзљСгАВжЦЗдЄ≠жОҐиЃ®дЇЖй£ОйАЯж®°еЭЧзЪДиЃЊиЃ°пЉМеМЕжЛђжЄРеПШй£ОгАБйШµй£ОеТМйЪПзЦЊй£ОзЪДзїДеРИ嚥еЉПпЉМеєґжПРдЊЫдЇЖзЫЄеЇФзЪДPythonеТМMATLABдї£з†Бз§ЇдЊЛгАВжО•зЭАиЃ®иЃЇдЇЖеПМйЧ≠зОѓжОІеИґз≠ЦзХ•пЉМеН≥еКЯзОЗе§ЦзОѓеТМзФµжµБеЖЕзОѓзЪДеЕЈдљУеЃЮзО∞зїЖиКВпЉМдї•еПКMPPTжОІеИґзФ®дЇОжЬАе§ІеМЦй£ОиГљжНХиОЈзЪДжЦєж≥ХгАВж≠§е§ЦпЉМињШжґЙеПКдЇЖзЯ≠иЈѓжХЕйЪЬж®°еЭЧзЪДеїЇж®°пЉМеМЕжЛђдЄЙзЫЄзФµеОЛзФµжµБзЙєжАІеТМз¶їжХ£ж®°еЮЛдЄОphasorж®°еЮЛзЪДеЇФзФ®гАВжЬАеРОпЉМеЉЇи∞ГдЇЖж∞Єз£БеРМж≠•жЬЇеєґзљСж®°еЮЛзЪДзЙєзВєеТМж≥®жДПдЇЛй°єгАВ йАВеРИдЇЇзЊ§пЉЪдїОдЇЛй£ОзФµйҐЖеЯЯз†Фз©ґзЪДжКАжЬѓдЇЇеСШгАБйЂШж†°зЫЄеЕ≥дЄУдЄЪеЄИзФЯгАБеѓєй£ОзФµеєґзљСдїњзЬЯжДЯеЕіиґ£зЪДеЈ•з®ЛжКАжЬѓдЇЇеСШгАВ дљњзФ®еЬЇжЩѓеПКзЫЃж†ЗпЉЪйАВзФ®дЇОй£ОзФµеЬЇеєґзљСдїњзЬЯз†Фз©ґпЉМеЄЃеК©з†Фз©ґдЇЇеСШзРЖиІ£еТМдЉШеМЦй£ОзФµжЬЇзїДеЬ®дЄНеРМй£ОйАЯжЭ°дїґдЄЛзЪДжАІиГљи°®зО∞пЉМзЙєеИЂжШѓеЬ®зЯ≠иЈѓжХЕйЪЬжГЕеЖµдЄЛзЪДеЇФеѓєжО™жЦљгАВзЫЃж†ЗжШѓжПРйЂШй£ОзФµз≥їзїЯзЪДз®≥еЃЪжАІеТМеПѓйЭ†жАІгАВ еЕґдїЦиѓіжШОпЉЪжЦЗдЄ≠жПРдЊЫзЪДдї£з†БзЙЗжЃµеТМеЕЈдљУеПВжХ∞иЃЊзљЃжЬЙеК©дЇОиѓїиАЕењЂйАЯдЄКжЙЛеєґињЫи°МеЃЮй™Мй™МиѓБгАВеРМжЧґжПРйЖТдЇЖдЄАдЇЫеЄЄиІБзЪДйФЩиѓѓеТМйЬАи¶Бж≥®жДПзЪДеЬ∞жЦєпЉМе¶Вз¶їжХ£еМЦж≠•йХњзЪДйАЙжЛ©гАБеИЭеІЛдљНзљЃеѓєйљРз≠ЙгАВ
йАВзФ®дЇОз©ЇжЙЛйБУиЃ≠зїГеТМжµЛиѓХеЬЇжЩѓ
еЖЕеЃєж¶Ви¶БпЉЪжЬђжЦЗдїЛзїНдЇЖйЗСзЙМйЯ≥дєРдљЬиѓНе§ІеЄИзЪДиІТиЙ≤иЃЊеЃЪгАБиГМжЩѓзїПеОЖгАБеБПе•љзЙєзВєгАБеИЫдљЬзЫЃж†ЗгАБжКАиГљдЉШеКњдї•еПКеЈ•дљЬжµБз®ЛгАВйЗСзЙМйЯ≥дєРдљЬиѓНе§ІеЄИеЗ≠еАЯжЈ±еОЪзЪДйЯ≥дєРжЦЗеМЦеЇХиХіеТМдЄ∞еѓМзЪДеИЫдљЬзїПй™МпЉМиГље§ЯдЄЇдЄНеРМй£Ож†ЉзЪДйЯ≥дєРеИЫдљЬж≠МиѓНпЉМжУЕйХње∞ЖдЉ†зїЯжЦЗеМЦеЕГзі†дЄОзО∞дї£жµБи°МжЦЗеМЦзЫЄзїУеРИпЉМеИЫдљЬеЗЇжЧҐеѓМжЬЙжГЕжДЯеПИиІ¶еК®дЇЇењГзЪДж≠МиѓНгАВеЬ®еИЫдљЬињЗз®ЛдЄ≠пЉМдЉЪдЄ•ж†ЉйБµеЃИз§ЊдЉЪдЄїдєЙж†ЄењГдїЈеАЉиІВпЉМе∞КйЗНзФ®жИЈйЬАж±ВпЉМжПРдЊЫдЄУдЄЪдњЃжФєеїЇиЃЃпЉМз°ЃдњЭж≠МиѓНеЖЕеЃєеБ•еЇЈеРСдЄКгАВ; йАВеРИдЇЇзЊ§пЉЪжЬЙж≠МиѓНеИЫдљЬйЬАж±ВзЪДйЯ≥дєРзИ±е•љиАЕгАБж≠МжЙЛжИЦйЯ≥дєРеИґдљЬдЇЇгАВ; дљњзФ®еЬЇжЩѓеПКзЫЃж†ЗпЉЪвС†дЄЇзЙєеЃЪдЄїйҐШжИЦжГЕжДЯеИЫдљЬж≠МиѓНпЉМе¶ВзИ±жГЕгАБеК±ењЧз≠ЙпЉЫвС°иЮНеРИдЉ†зїЯдЄОзО∞дї£жЦЗеМЦеЕГзі†еИЫдљЬзЛђзЙєй£Ож†ЉзЪДж≠МиѓНпЉЫвСҐеѓєеЈ≤жЬЙж≠МиѓНињЫи°М洶иЙ≤еТМдЉШеМЦгАВ; йШЕиѓїеїЇиЃЃпЉЪйШЕиѓїжЧґеПѓдї•йЗНзВєеЕ≥ж≥®дљЬиѓНе§ІеЄИзЪДеИЫдљЬеБПе•љгАБжКАиГљдЉШеКњдї•еПКеЈ•дљЬжµБз®ЛпЉМжЬЙеК©дЇОжЫіе•љеЬ∞зРЖиІ£е¶ВдљХеИЫдљЬеЗЇйЂШиі®йЗПзЪДж≠МиѓНгАВеРМжЧґпЉМеЬ®жПРеЗЇеИЫдљЬйЬАж±ВжЧґпЉМе∞љйЗПиѓ¶зїЖжППињ∞иЗ™еЈ±зЪДжГЕжДЯиГМжЩѓеТМжЬЯжЬЫпЉМдї•дЊњиОЈеЊЧжЫіиііеРИењГжДПзЪДдљЬеУБгАВ
linuxдєЛзФ®жИЈзЃ°зРЖжХЩз®Л.md
еМЕжЛђпЉЪжЇРз®ЛеЇПеЈ•з®ЛжЦЗдїґгАБProteusдїњзЬЯеЈ•з®ЛжЦЗдїґгАБйЕНе•ЧжКАжЬѓжЙЛеЖМз≠Й 1гАБйЗЗзФ®51/52еНХзЙЗжЬЇдљЬдЄЇдЄїжОІиКѓзЙЗпЉЫ 2гАБйЗЗзФ®1602жґ≤жЩґжШЊз§ЇиЃЊзљЃеПКзКґжАБпЉЫ 3гАБйЗЗзФ®L298й©±еК®дЄ§дЄ™зФµжЬЇпЉМж®°жЛЯжЬЇжҐ∞иЗВеК®еКЫгАБзІїеК®еЇХзЫШеК®еКЫпЉЫ 3гАБй¶ЦеЕИжМЙйФЃйЕНзљЃ-еЊЕжРђињРзЙ©еЭЧзЪДйЂШеЇ¶еТМеЃљеЇ¶пЉИдЄЇ0дЄНиГљеЉАеІЛжРђињРпЉЙпЉЫ 4гАБжМЙдЄЛеРѓеК®йФЃеЉАеІЛжРђињРпЉМжРђињРжµБз®Ле¶ВдЄЛпЉЪ жЬЇжҐ∞иЗВеЕИжККзЙ©еЭЧжКУеПЦеИ∞жЬЇеЩ®иљ¶дЄКпЉМ жЬЇжҐ∞иЗВеЗПйАЯ жЬЇеЩ®иљ¶еЄ¶зЭАзЙ©еЭЧеЙНеЊАзЫЃзЪДеЬ∞ жЬЇеЩ®иљ¶еЗПйАЯ жЬЇжҐ∞иЗВжККзЙ©еЭЧжФЊдЄЛжЭ• жЬЇжҐ∞иЗВеЗПйАЯ жЬЇеЩ®иљ¶еЫЮеИ∞зЙ©еЭЧе†ЖзІѓе§ДпЉИж≠§жЧґжЬЇеЩ®иљ¶жШѓз©Їиљ¶пЉЙ жЬЇеЩ®иљ¶еЗПйАЯ иЬВйЄ£еЩ®жПРйЖТ жМЙдЄЛе§НдљНйФЃпЉМзїУжЭЯжЬђжђ°жРђињР
еЖЕеЃєж¶Ви¶БпЉЪжЬђжЦЗиѓ¶зїЖдїЛзїНдЇЖеЯЇдЇОдЄЛеЮВжОІеИґзЪДдЄЙзЫЄйАЖеПШеЩ®зФµеОЛзФµжµБеПМйЧ≠зОѓжОІеИґзЪДдїњзЬЯжЦєж≥ХеПКеЕґеЬ®MATLAB/SimulinkеТМPLECSдЄ≠зЪДеЕЈдљУеЃЮзО∞гАВй¶ЦеЕИиІ£йЗКдЇЖдЄЛеЮВжОІеИґзЪДеЯЇжЬђеОЯзРЖпЉМеН≥жЬЙеКЯи∞ГйҐСеТМжЧ†еКЯи∞ГеОЛпЉМеєґзїЩеЗЇдЇЖзЫЄеЇФзЪДжХ∞е≠¶и°®иЊЊеЉПгАВйЪПеРОиЃ®иЃЇдЇЖзФµеОЛзОѓеТМзФµжµБзОѓзЪДиЃЊиЃ°дЄОеПВжХ∞жХіеЃЪпЉМеЉЇи∞ГдЇЖдЄ§иАЕеЄ¶еЃљзЪДеЈЃеЉВдї•еПКPIжОІеИґеЩ®зЪДеПВжХ∞йАЙжЛ©гАВжЦЗдЄ≠ињШжПРеИ∞дЇЖдЄАдЇЫеЄЄиІБзЪДи∞ГиѓХжКАеЈІпЉМе¶ВйФБзЫЄзОѓзЪДеУНеЇФйАЯеЇ¶гАБLCжї§ж≥ҐеЩ®зЪДи∞РжМѓзВєе§ДзРЖгАБж≠їеМЇжЧґйЧіиЃЊзљЃз≠ЙгАВж≠§е§ЦпЉМдљЬиАЕеИЖдЇЂдЇЖдЄАдЇЫеЃЮзФ®зЪДзїПй™МпЉМе¶ВйБњеЕНињЗеЇ¶жї§ж≥ҐгАБеРИзРЖиЃЊзљЃйЗЗж†ЈеС®жЬЯеТМдЄЛеЮВз≥їжХ∞з≠ЙгАВжЬАеРОпЉМйАЪињЗз™БеК†иіЯиљљжµЛиѓХе±Хз§ЇдЇЖз≥їзїЯзЪДеК®жАБеУНеЇФжАІиГљгАВ йАВеРИдЇЇзЊ§пЉЪдїОдЇЛзФµеКЫзФµе≠РгАБеЊЃзФµзљСз†Фз©ґзЪДжКАжЬѓдЇЇеСШпЉМе∞§еЕґжШѓжЬЙдЄАеЃЪMATLAB/SimulinkеТМPLECSдљњзФ®зїПй™МзЪДз†ФеПСдЇЇеСШгАВ дљњзФ®еЬЇжЩѓеПКзЫЃж†ЗпЉЪйАВзФ®дЇОеЄМжЬЫжЈ±еЕ•дЇЖиІ£дЄЙзЫЄйАЖеПШеЩ®дЄЛеЮВжОІеИґжЬЇеИґзЪДз†Фз©ґдЇЇеСШеТМжКАжЬѓдЇЇеСШпЉМжЧ®еЬ®еЄЃеК©дїЦдїђжОМжП°зФµеОЛзФµжµБеПМйЧ≠зОѓжОІеИґзЪДеЕЈдљУеЃЮзО∞жЦєж≥ХпЉМжПРйЂШдїњзЬЯзЪДеЗЖз°ЃжАІеТМжХИзОЗгАВ еЕґдїЦиѓіжШОпЉЪжЬђжЦЗдЄНдїЕжПРдЊЫдЇЖиѓ¶зїЖзЪДзРЖиЃЇиЃ≤иІ£пЉМињШзїУеРИдЇЖе§ІйЗПзЪДеЃЮжИШзїПй™МеТМи∞ГиѓХжКАеЈІпЉМжЬЙеК©дЇОиѓїиАЕжЫіе•љеЬ∞зРЖиІ£еТМеЇФзФ®зЫЄеЕ≥жКАжЬѓгАВ
еЖЕеЃєж¶Ви¶БпЉЪжЬђжЦЗиѓ¶зїЖдїЛзїНдЇЖеЕЙдЉПеєґзљСйАЖеПШеЩ®зЪДеЕ®ж†ИеЉАеПСиµДжЦЩпЉМжґµзЫЦдЇЖдїОз°ђдїґиЃЊиЃ°еИ∞жОІеИґзЃЧж≥ХзЪДеРДдЄ™жЦєйЭҐгАВй¶ЦеЕИпЉМжЦЗзЂ†жЈ±еЕ•жОҐиЃ®дЇЖеКЯзОЗжО•еП£жЭњзЪДиЃЊиЃ°пЉМеМЕжЛђIGBTзЉУеЖ≤зФµиЈѓгАБPCBеЄГе±Адї•еПКEMIжї§ж≥ҐеЩ®зЪДеЕЈдљУеПВжХ∞еТМиЃЊиЃ°жАЭиЈѓгАВжО•зЭАпЉМйЗНзВєиЃ≤иІ£дЇЖдЄїжОІDSPжЭњзЪДж†ЄењГжОІеИґзЃЧж≥ХпЉМе¶ВMPPTзЃЧж≥ХзЪДеЃЮзО∞еПКеЕґж≥®жДПдЇЛй°єгАВж≠§е§ЦпЉМињШиѓ¶зїЖжППињ∞дЇЖй©±еК®жЙ©е±ХжЭњзЪДйЧ®жЮБй©±еК®зФµиЈѓиЃЊиЃ°пЉМзЙєеИЂжШѓеЕЙиА¶йЪФз¶їеТМй©±еК®зФµйШїзЪДйАЙжЛ©гАВеРМжЧґпЉМжЦЗзЂ†жПРдЊЫдЇЖеєґиБФдїњзЬЯзЪДеЕЈдљУеЃЮзО∞жЦєж≥ХпЉМе±Хз§ЇдЇЖзОѓжµБжКСеИґз≠ЦзХ•зЪДжХИжЮЬгАВжЬАеРОпЉМеИЖдЇЂдЇЖиЃЄе§ЪеЃЭиіµзЪДеЃЮжИШзїПй™МеТМи∞ГиѓХжКАеЈІпЉМе¶ВдЄїеПШеОЛеЩ®зїХеИґгАБPWMиЊУеЗЇжї§ж≥ҐгАБзФµжµБжОҐе§ідљњзФ®з≠ЙгАВ йАВеРИдЇЇзЊ§пЉЪдїОдЇЛзФµеКЫзФµе≠РгАБеЕЙдЉПз≥їзїЯиЃЊиЃ°зЪДз†ФеПСеЈ•з®ЛеЄИеТМжКАжЬѓзИ±е•љиАЕгАВ дљњзФ®еЬЇжЩѓеПКзЫЃж†ЗпЉЪвС†еЄЃеК©еЈ•з®ЛеЄИзРЖиІ£еТМжОМжП°еЕЙдЉПеєґзљСйАЖеПШеЩ®зЪДз°ђдїґиЃЊиЃ°еТМжОІеИґзЃЧж≥ХпЉЫвС°жПРдЊЫиѓ¶зїЖзЪДеЃЮжИШзїПй™МеТМи∞ГиѓХжКАеЈІпЉМжПРеНЗдЇІеУБзЪДеПѓйЭ†жАІеТМжАІиГљпЉЫвСҐйАВзФ®дЇОеЄМжЬЫжЈ±еЕ•дЇЖиІ£еЕЙдЉПеєґзљСйАЖеПШеЩ®еЕ®ж†ИеЉАеПСзЪДжКАжЬѓдЇЇеСШгАВ еЕґдїЦиѓіжШОпЉЪжЦЗдЄ≠дЄНдїЕжПРдЊЫдЇЖеЕЈдљУзЪДзФµиЈѓиЃЊиЃ°еТМдї£з†БеЃЮзО∞пЉМињШеИЖдЇЂдЇЖиЃЄе§ЪеЃЭиіµзЪДеЃЮйЩЕжУНдљЬзїПй™МеТМеЄЄиІБйЧЃйҐШзЪДиІ£еЖ≥жЦєж°ИпЉМжЬЙеК©дЇОжПРйЂШеЉАеПСжХИзОЗеТМдЇІеУБиі®йЗПгАВ
еЖЕеЃєж¶Ви¶БпЉЪжЬђжЦЗиѓ¶зїЖдїЛзїНдЇЖз≤Те≠РзЊ§дЉШеМЦпЉИPSOпЉЙзЃЧж≥ХдЄО3-5-3е§Ъй°єеЉПзЫЄзїУеРИзЪДжЦєж≥ХпЉМеЬ®жЬЇеЩ®дЇЇиљ®ињєиІДеИТдЄ≠зЪДеЇФзФ®гАВй¶ЦеЕИиІ£йЗКдЇЖз≤Те≠РзЊ§зЃЧж≥ХзЪДеЯЇжЬђеОЯзРЖеПКеЕґеЬ®дЉШеМЦиљ®ињєеПВжХ∞жЦєйЭҐзЪДдљЬзФ®пЉМйЪПеРОйШРињ∞дЇЖ3-5-3е§Ъй°єеЉПзЪДжХ∞е≠¶ж®°еЮЛпЉМзЙєеИЂжШѓе¶ВдљХеИ©зФ®дЄНеРМйШґжђ°зЪДе§Ъй°єеЉПз°ЃдњЭиљ®ињєзЪДеє≥жїСињЗжЄ°еєґжї°иґ≥иЊєзХМжЭ°дїґгАВжЦЗдЄ≠ињШжПРдЊЫдЇЖеЕЈдљУзЪДPythonдї£з†БеЃЮзО∞пЉМе±Хз§ЇдЇЖе¶ВдљХйАЪињЗз≤Те≠РзЊ§зЃЧж≥ХдЉШеМЦжЧґйЧіеИЖйЕНпЉМдљњ3-5-3е§Ъй°єеЉПзФЯжИРзЪДиљ®ињєиЊЊеИ∞жЧґйЧіжЬАдЉШгАВж≠§е§ЦпЉМдљЬиАЕеИЖдЇЂдЇЖдЄАдЇЫеЃЮиЈµзїПй™МпЉМе¶ВеК†еЕ•жГ©зљЪй°єдї•йБњеЕНиґЕйАЯпЉМдї•еПКдљњзФ®йЪПжЬЇжЙ∞еК®еЄЃеК©з≤Те≠РиЈ≥еЗЇе±АйГ®жЬАдЉШгАВ йАВеРИдЇЇзЊ§пЉЪеѓєжЬЇеЩ®дЇЇињРеК®иІДеИТжДЯеЕіиґ£зЪДзІСз†ФдЇЇеСШгАБеЈ•з®ЛеЄИеТМжКАжЬѓзИ±е•љиАЕпЉМе∞§еЕґжШѓжЬЙдЄАеЃЪзЉЦз®ЛеЯЇз°АеєґеѓєдЉШеМЦзЃЧж≥ХжЬЙеИЭж≠•дЇЖиІ£зЪДдЇЇе£ЂгАВ дљњзФ®еЬЇжЩѓеПКзЫЃж†ЗпЉЪйАВзФ®дЇОйЬАи¶Бз≤Њз°ЃжОІеИґжЬЇеЩ®дЇЇињРеК®зЪДеЇФзФ®еЬЇеРИпЉМе¶ВеЈ•дЄЪиЗ™еК®еМЦзФЯдЇІзЇњгАБжЧ†дЇЇжЬЇеѓЉиИ™з≠ЙгАВдЄїи¶БзЫЃж†ЗжШѓеЬ®дњЭиѓБиљ®ињєеє≥жїСзЪДеЙНжПРдЄЛпЉМе∞љеПѓиГљзЉ©зЯ≠ињРеК®жЧґйЧіпЉМжПРйЂШеЈ•дљЬжХИзОЗгАВ еЕґдїЦиѓіжШОпЉЪжЦЗдЄ≠дЄНдїЕзїЩеЗЇдЇЖзРЖиЃЇиЃ≤иІ£пЉМињШжЬЙиѓ¶зїЖзЪДдї£з†Бз§ЇдЊЛеТМи∞ГиѓХжКАеЈІпЉМдЊњдЇОиѓїиАЕзРЖиІ£еТМеЃЮиЈµгАВеРМжЧґеЉЇи∞ГдЇЖеЃЮйЩЕеЇФзФ®дЄ≠йЬАи¶Бж≥®жДПзЪДйЧЃйҐШпЉМе¶Вз≥їзїЯзЪДеїЇж®°з≤ЊеЇ¶еТМеЃЙеЕ®жАІиАГйЗПгАВ
KUKAжЬЇеЩ®дЇЇзЫЄеЕ≥иµДжЦЩ
еЖЕеЃєж¶Ви¶БпЉЪжЬђжЦЗиѓ¶зїЖжОҐиЃ®дЇЖеЕЙе≠РжЩґдљУдЄ≠зЪДжЭЯзЉЪжАБеЬ®ињЮзї≠и∞±дЄ≠пЉИBICпЉЙеПКеЕґдЄОиљ®йБУиІТеК®йЗПпЉИOAMпЉЙжњАеПСзЪДеЕ≥з≥їгАВй¶ЦеЕИдїЛзїНдЇЖеЕЙе≠РжЩґдљУзЪДеЯЇжЬђж¶ВењµеТМBICзЪДзЛђзЙєжАІиі®пЉМйЪПеРОе±Хз§ЇдЇЖе¶ВдљХйАЪињЗPythonдї£з†Бж®°жЛЯдЇМзїіеЕЙе≠РжЩґдљУдЄ≠зЪДBICпЉМеєґиІ£йЗКдЇЖBICеЬ®еЕЙе≠¶еЩ®дїґдЄ≠зЪДжљЬеЬ®еЇФзФ®гАВжО•зЭАиЃ®иЃЇдЇЖOAMжњАеПСдЄОBICдєЛйЧізЪДиБФз≥їпЉМзЙєеИЂжШѓBICе¶ВдљХеҐЮеЉЇOAMжњАеПСжХИзОЗгАВжЦЗдЄ≠ињШжПРдЊЫдЇЖдљњзФ®жЬЙйЩРеЈЃеИЖжЧґеЯЯпЉИFDTDпЉЙжЦєж≥ХиЃ°зЃЧOAMзЪДеЕЈдљУж≠•й™§пЉМеєґдїЛзїНдЇЖиЃ°зЃЧжЬђеЊБжАБеТМдЄЙзїіQеАЉзЪДжЦєж≥ХгАВж≠§е§ЦпЉМдљЬиАЕеИЖдЇЂдЇЖдЄАдЇЫеЃЮй™МдЄ≠зЪДжЬЙиґ£еПСзО∞пЉМе¶ВзЙєеЃЪжЭ°дїґдЄЛBICи°®зО∞еЗЇOAMзЙєеЊБпЉМдї•еПКдЄНеРМеПВжХ∞иЃЊзљЃеѓєQеАЉзЪДељ±еУНгАВ йАВеРИдЇЇзЊ§пЉЪеѓєеЕЙе≠РжЩґдљУгАБBICеТМOAMжДЯеЕіиґ£зЪДзІСз†ФдЇЇеСШеТМжКАжЬѓзИ±е•љиАЕпЉМе∞§еЕґжШѓдїОдЇЛеЊЃзЇ≥еЕЙе≠Ре≠¶з†Фз©ґзЪДдЄУдЄЪдЇЇе£ЂгАВ дљњзФ®еЬЇжЩѓеПКзЫЃж†ЗпЉЪйАВзФ®дЇОеЄМжЬЫйАЪињЗдї£з†Бж®°жЛЯжЈ±еЕ•дЇЖиІ£еЕЙе≠РжЩґдљУдЄ≠BICеТМOAMжњАеПСжЬЇеИґзЪДз†Фз©ґдЇЇеСШгАВзЫЃж†ЗжШѓжОМжП°BICеТМOAMзЪДеЯЇз°АзРЖиЃЇпЉМе≠¶дЉЪдљњзФ®PythonеТМеЕґдїЦеЈ•еЕЈињЫи°Мж®°жЛЯпЉМеєґзРЖиІ£ињЩдЇЫзО∞и±°еЬ®еЃЮйЩЕеЇФзФ®дЄ≠зЪДжљЬеКЫгАВ еЕґдїЦиѓіжШОпЉЪжЦЗзЂ†дЄНдїЕжПРдЊЫдЇЖиѓ¶зїЖзЪДдї£з†Бз§ЇдЊЛпЉМињШеИЖдЇЂдЇЖиЃЄе§ЪеЃЮй™МењГеЊЧеТМжКАеЈІпЉМеЄЃеК©иѓїиАЕйБњеЕНеЄЄиІБйФЩиѓѓпЉМжПРйЂШж®°жЛЯз≤ЊеЇ¶гАВеРМжЧґпЉМеЉЇи∞ГдЇЖзЙ©зРЖз¶їжХ£еМЦжЦєеЉПеѓєжХ∞еАЉиЃ°зЃЧзїУжЮЬзЪДйЗНи¶Бељ±еУНгАВ
еЖЕеЃєж¶Ви¶БпЉЪжЬђжЦЗиѓ¶зїЖдїЛзїНдЇЖе¶ВдљХдљњзФ®C#еТМHalcon 17.12жЮДеїЇдЄАдЄ™еКЯиГљеЕ®йЭҐзЪДеЈ•дЄЪиІЖиІЙй°єзЫЃгАВдЄїи¶БеЖЕеЃєжґµзЫЦй°єзЫЃйЕНзљЃгАБHalconиДЪжЬђзЪДйАЙжЛ©дЄОдњЃжФєгАБзЫЄжЬЇи∞ГиѓХгАБж®°жЭњеМєйЕНгАБзФЯ䯲展еОЖзЃ°зРЖгАБеОЖеП≤еЫЊеГПдњЭе≠Шдї•еПКдЄОдЄЙиП±FX5U PLCзЪД俕姙зљСйАЪиЃѓгАВжЦЗдЄ≠дЄНдїЕжПРдЊЫдЇЖеЕЈдљУзЪДдї£з†Бз§ЇдЊЛпЉМињШиЃ®иЃЇдЇЖеЃЮйЩЕй°єзЫЃдЄ≠еЄЄиІБзЪДжМСжИШеПКеЕґиІ£еЖ≥жЦєж°ИпЉМе¶ВзОѓеҐГйЕНзљЃгАБзЫЄжЬЇжОІеИґгАБж®°жЭњеМєйЕНеПВжХ∞и∞ГжХігАБPLCйАЪиЃѓзїЖиКВгАБзФЯдЇІжХ∞жНЃзЃ°зРЖеТМеЫЊеГПе≠ШеВ®з≠ЦзХ•з≠ЙгАВ йАВеРИдЇЇзЊ§пЉЪдїОдЇЛеЈ•дЄЪиІЖиІЙйҐЖеЯЯзЪДеЉАеПСиАЕеТМжКАжЬѓдЇЇеСШпЉМе∞§еЕґжШѓйВ£дЇЫеЄМжЬЫжЈ±еЕ•дЇЖиІ£C#дЄОHalconзїУеРИдљњзФ®зЪДдЄУдЄЪдЇЇе£ЂгАВ дљњзФ®еЬЇжЩѓеПКзЫЃж†ЗпЉЪйАВзФ®дЇОйЬАи¶БеЉАеПСе§НжЭВиІЖиІЙж£АжµЛз≥їзїЯзЪДеЈ•дЄЪеЇФзФ®еЬЇжЩѓпЉМжЧ®еЬ®жПРйЂШж£АжµЛз≤ЊеЇ¶гАБиЗ™еК®еМЦз®ЛеЇ¶еТМжХ∞жНЃзЃ°зРЖжХИзОЗгАВеЕЈдљУзЫЃж†ЗеМЕжЛђдљЖдЄНйЩРдЇОпЉЪеЃЮзО∞йЂШжХИзЪДиІЖиІЙе§ДзРЖжµБз®ЛгАБз°ЃдњЭзЫЄжЬЇдЄОPLCзЪДжЧ†зЉЭеНПдљЬгАБдЉШеМЦж®°жЭњеМєйЕНзЃЧж≥ХгАБжЬЙжХИзЃ°зРЖзФЯдЇІеТМж£АжµЛжХ∞жНЃгАВ еЕґдїЦиѓіжШОпЉЪжЦЗдЄ≠еЉЇи∞ГдЇЖж°ЖжЮґжХіеРИзЪДйЗНи¶БжАІпЉМеєґжПРдЊЫдЇЖдЄАдЇЫеЃЮзФ®зЪДжКАжЬѓжПРз§ЇпЉМе¶ВйБњеЕНдЄНеРМзЙИжЬђдєЛйЧізЪДеЕЉеЃєжАІйЧЃйҐШгАБе§ДзРЖеЃЮжЧґеЫЊеГПжµБзЪДжЬАдљ≥еЃЮиЈµгАБз°ЃдњЭзЇњз®ЛеЃЙеЕ®зЪДжУНдљЬз≠ЙгАВж≠§е§ЦпЉМињШжПРеИ∞дЇЖдЄАдЇЫеЄЄиІБйФЩиѓѓеПКеЕґиІДйБњжЦєж≥ХпЉМеЄЃеК©еЉАеПСиАЕе∞Сиµ∞еЉѓиЈѓгАВ