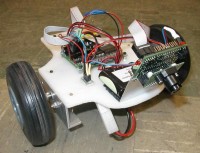
这样你的机器人会有两个轮子,被机器人最基本的驱动算法所驱动-差分驱动。
前进时,两个轮子要以相同速度前进。
后退时,两个轮子以相同速度后退。
左转时,是左边的轮子后退而右边的轮子前进。
右转时,右边的轮子后退而左边的轮子前进。
你可以通过改变两个轮子的转动速度得到一些有趣的曲线。但是现在,为了保证你的第一个程序的简单,让我们保持算法的二元性。哦对了不要忘了你还需要一个小脚轮(必须是摩擦力小的)。记不记得几何里所学的3点成面?
要制作一个差分驱动器我需要有什么呢?只需要有两样东西:2个轮子和2个电机。听起简单,但我们还是需要一个整体的设计方案。
让我们先从轮子开始。大轮子会让你的机器人移动速度更快,而小的轮子会慢些。那为什么不直接用大的呢?大轮子意味着你的机器人有更小的转矩去携带沉重的负荷,大轮子也更难很好的控制位置。而且你的传感器一般跟不上位置快速的移动。但另一方面,移动慢的机器人常常会因自杀(比如撞击到墙壁)而烧毁,你权衡一下在做决定。我建议你的第一个机器人应该使用直径是2-3"的轮子。浏览航天器爱好者网站或我们已有的零部件的清单中找到摩擦力大的轮子。如要要买的大约需要5-10美元包含运费。别忘了考虑你的轮子如何与你的电机连接。
好了现在我们来看看电动机。为机器人选择一个最优的电动机要考虑重量,传动比率(gearing ratios),地形的要求,速度和加速度的要求,电压,耗电量,可控制性等一整系列的事情,这些对于一个初学者来说简直就是灾难。所以我们先应付一下。让你的机器人尽可能的轻,选一个不容易被烧坏的电机。但要记得电机越大电池的寿命越短、控制电路也更复杂更昂贵。
以下是我对你的第一个机器人电动机的建议:
电压:5V-8V
转矩:是你设计需要的2倍
网上有很多地方都卖直流电动机。也可以考虑购买伺服电动机。他们的实现复杂度和花费基本相同。每一种都有自身的优点。伺服电动机更容易控制,但是他们的功率都比较小,需要明确的电压,and are less intuitive。电机的功率和能量都比较大可以粗略的处理,但别忘了智能控制的是不会让这种情况发生的。每个直流电机/伺服电机大概是1-40美元。我建议为你的第一个机器购买8-20美元的电机。
(未完待续)
分享到:





相关推荐
作为一个创客项目,Otto机器人鼓励用户参与到设计、制作和改进的过程中,不仅学习基础的电子和编程知识,还培养了解决问题和团队协作的能力。这种以实践为主的教育方式有助于提升青少年的创新思维和动手能力。 在...
Arduino 机器人制作入门教程 第1章 Arduino 教学...第二章 机器人点亮一个 LED 灯和串口通信 第三章 伺服电机控制和机器人运动控制 第四章 机器人触觉导航 第五章 机器人红外导航 第六章 机器人人机交互和显示技术
教程的第一部分详细讲解了FANUC机器人程序的中断与恢复机制。这是在实际操作中经常会遇到的情况,对于保证机器人系统稳定运行至关重要。程序可能因为遇到报警或操作人员的主动干预而中断,比如急停按钮(UI[1]*IMSTP...
STM32 机器人制作实践入门教程.pdf,第1 章 ARM CORTEX‐M3 处理器编程环境与嵌入式系统;第2 章STM32 单片机I/O 端口与伺服电机控制;第3 章 STM32 单片机程序模块化设计与机器人运动控制;第4 章 STM32 单片机中断...
高校-机器人教程PPT资料 机器人课程教学教程资料: 1-机器人技术 绪论 33页.ppt 10-机器人的感觉 29页.ppt 11-机器人规划 92页.ppt 12-机器人控制 82页.ppt 2-机械手的运动 41页.ppt 3-机械手的控制 58页.ppt 4-...
例如,第一张图(1.png)可能描绘了初始状态,所有机器人分布在起点;第二张图(2.png)展示了经过一段时间后,机器人开始移动并试图达到编队状态;第三张图(3.png)可能显示了编队正在形成;而最后一张图(4.png)...
如果您对制作微信机器人感兴趣,那么本教程将为您详细指导如何从零开始,一步步制作属于自己的微信机器人。 首先,您需要准备硬件设施,即购买一台腾讯云服务器。腾讯云服务器能够提供稳定的服务保证,是构建微信...
2. 机械设计:机器人设计的第一步通常涉及机械结构的规划。这包括选择适当的材料、理解力和运动学原理,以及设计能够实现特定功能的机械臂、轮子或其他运动部件。 3. 电子工程:机器人通常包含复杂的电路,如微控制...
负载共享则是指通过几何耦合,实现多台机器人共同承担一个负载,从而提高负载能力和作业范围。 在RoboTeam软件中,还提供了一种扩展主从原理,这是一种特殊的协同控制模式,可以让一台机器人的动作影响其他机器人的...
在机器人控制领域,MATLAB是一种常用的工具,因其强大的数值计算和可视化能力,使得它成为进行机器人运动学、动力学分析以及控制系统设计的理想选择。本章节主要聚焦于"机器人控制第4章仿真程序",其中涉及的MATLAB...
### NAO机器人刷机教程与软件使用指南 #### 一、前言 NAO机器人是一款由法国Aldebaran Robotics公司开发的人形机器人,广泛应用于教育、科研以及娱乐等领域。对于用户来说,有时可能需要对NAO机器人进行系统升级...
#### 二、ROVIO机器人外网控制设置详解 实现ROVIO机器人的远程控制是提升其应用灵活性的关键步骤,以下为外网控制设置的详细指导: **1. 端口映射与DMZ设置:** - 登录无线路由器管理界面,启用DMZ功能,将主机...
了解这些语言的基本语法结构,如变量、条件语句、循环和函数,是开始机器人编程的第一步。在实际操作中,你需要根据机器人的硬件平台和特定任务选择合适的编程语言和框架。 接着,我们来谈谈错误代码处理。在编程...
《瓢虫机器人制作教程》是一份详尽的DIY指南,旨在帮助爱好者们亲手制作一款可爱的瓢虫形态的机器人。这份教程涵盖了从准备材料到组装完成的每一个步骤,旨在激发创新精神,提升动手能力。 首先,我们需要准备一...
- 如果同时激活多个输入信号(如 IN1 和 IN2 同时为 ON),则根据设定的先后顺序选取第一个非零速度比率值进行控制。例如,S4C288 为 10%,S4C289 为 20%,则 IN1 优先级高于 IN2,即使两个信号都为 ON,也只会采用 ...
### 安川机器人培训第二课知识点详述 #### 一、引言 安川电机(YASKAWA)作为全球领先的工业机器人制造商之一,在自动化领域享有盛誉。本篇旨在通过安川机器人培训第二课的内容,深入讲解机器人的坐标系统及其应用,...
目 录 第一章 安川NX100 MH6机器人结构及工作原理 4 一、安川机器人NX100 MH6简介 4 二、安川机器人NX100 MH6的结构 7 1、电源箱 7 2、控制箱 7 3、 本体 13 4、示教编程器 14 5、配套设备 15 第二章 安川NX100 MH6...
4. 编程与上传:编写你的第一个程序,如“Hello, World!”,即点亮一个LED灯。将代码上传到Arduino板,观察实验结果。 三、机器人基础 1. 机械结构:设计机器人的骨架,考虑其移动方式(轮式、履带式等)和结构稳定...
在第一章《安全注意事项》中,首先强调了安全责任的重要性,FANUC机器人所有者和操作者需对自身安全负责,并需遵循安全条款。其次,列出了机器人不宜使用的环境,如燃烧、无线电干扰、水中、运输人或动物等危险场景...
FANUC机器人教程系列的第一课就为我们带来了FANUC机器人背后的强大企业——上海发那科机器人有限公司的详细介绍。上海发那科机器人有限公司作为FANUC株式会社在中国的全资子公司,是FANUC在中国生产和销售的前沿阵地...