
续上篇《Web开发基本准则-55实录-Web访问安全》。
Web开发基本准则-55实录-缓存策略
郑昀 创建于2013年2月
郑昀 最后更新于2013年10月26日
提纲:
- Web访问安全
- 缓存策略
- 存储介质连接池
- 业务降级
- 并发请求的处理
关键词:
会话串号,Cache-Control头域,缓存穿透,缓存集体失效,缓存重建,缓存雪崩,缓存永不过期,缓存计数器,
二,缓存策略
这里的“缓存”概念不只限于服务器端的“缓存”。
2.1.防会话串号
如果你收到一个投诉,说访问“我的个人中心”页面时进入其他人的帐号,至少订单列表上显示的不是自己的。此时,技术支持人员可以提三个问题,第一,对页面 上显示的信息是否有操作权限,如取消订单;第二,浏览器地址栏上给URL增加访问参数,如追加一个&111之类的字符串,看看页面是否还是显示别 人的信息;第三,投诉者上网接入方式是什么,如铁通光纤宽带,如通过某款代理软件上网。
如果既无操作权限,追加URL参数后又能看到自己的帐号信息或页面提示处于未登录状态,那么说明是URL已被各级 HTTP Proxies 缓存:
即在服务器端收到 Request 之前,网络链路上的某一级代理已返回缓存数据。
2.1.1.简单办法,如利用Expiration Model
第一种:如果页面 Response 里设置了正确的 Last-modified 和 Expires 头域,那么 基本过期模型 已经能正常运转了,因此,头域里的 Cache-Control:private 声明就已经够了,HTTP Caches 和 User Agent 都会根据这两个字段检查缓存网页是否陈旧。
第二种:重要页面的URL上加时间戳参数。
第三种:像淘宝博文[注1]所描述的:“cookie 里增加一个值,用来记录通过关键 cookie 计算出来的签名,这个签名的算法非常简单。每次请求到服务端的时候 session 框架代码里会对此签名进行匹配,如果和服务端获取的数据签名出来的值是一致的,则认为合法,否则清空 session 信息和 cookie 信息,让用户重新登录。”
2.1.2.需要有更多背景知识的办法:利用 Cache-Control 头域控制
Web开发工程师都需要了解 Cache-control 头域背后的 HTTP 1.1缓存控制机制和缓存重验证机制。
先说处理办法是:含个人敏感信息的网页响应头里,声明 Cache-Control:must-revalidate,proxy-revalidate,no-store,private,no-cache 即可。
下面简单地介绍一下背景知识,详细信息请阅读 HTTP/1.1 RFC2616, section 13 HTTP里的缓存 和 HTTP/1.1 RFC2616, section 14 头域定义,或找到 HTTP 1.1协议中文版阅读。
HTTP1.1协议定义,Response 是可以被各种 HTTP caches 缓存的。
除非有 Cache-Control 控制指令的特殊约定,否则从浏览器端到源服务器(origin server)端之间链路上所存在的各种 Caching System 都完全有可能缓存一个成功的 response:
如果这个 cache entry 是 fresh 的,可能不会(去源服务器端)校验直接返回;也可能会做一个校验再返回。
一个状态码是200, 203, 206, 300, 301, 410的 response,可能会被缓存。
2.2.缓存穿透
- 目的
- 防止访问(短期内)必然不存在的数据导致请求穿透缓存直接打到 DB。
- 原因
- 可能是数据真的不存在,但也可能是第三方恶意构造大量不存在的 id 来冲击 DB。
- 多种手段结合
2.3.”半缓存“策略
缓存命中率低,其中一个原因是,你缓存的数据被人访问间隔长、几率低,于是在下次访问到来之前缓存早已失效。命中率低,为我们指出了优化方向。
如,用户在查询一个列表页时,我们可以把前6页的数据缓存起来,再往后的页码,访问频次很低,也许就不需要缓存了。(出处)
2.4.缓存集体失效
以下原因都会导致缓存集体失效,从而引发系统”抖动“甚至”雪崩“:
- 系统预热数据的缓存过期时间过于整齐划一;
- 缓存系统宕机或重启;
- 访问高峰期间种下了一大批缓存,过期时间非常接近。
处理手段:
- 缓存过期时间散列开:在过期时间基础上增加一个随机值,如1秒~120秒随机,将大家的过期时间尽量打散。
- 防范缓存节点暂不可用的缓存双写策略:
- memcache双写:向 memcahce 的 Master Ring 和 Backup Ring 双写,如下图1所示:
-
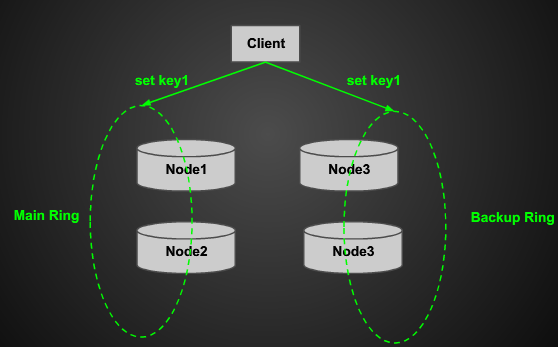 图1 memcache 双写 原图出自点评技术PPT
图1 memcache 双写 原图出自点评技术PPT - Redis备份写:向 memcache 写入的同时,写一份到备份缓存 Redis 里,键值的缓存过期时间非常大,如原键值在 memcache 过期时间5分钟,在 Redis 里则8小时过期。当 memcache 集群节点暂不可用时,Web工程就切换读取备用缓存 Redis。这种思路是保证基本可用性,所以必要时刻可以给用户返回脏数据。
- 对于不同的业务场景,缓存的使用策略也不同:
- 当系统面临缓存异常的危险时,有些系统可以采用备份方案继续支撑服务。有些系统则会优雅降级,将某些依赖缓存的功能直接去除,保证主服务的正确性。所以这两种策略的选择需要根据实际的业务场景考虑并实施。(出处)
2.5.分级缓存
有些业务场景里,应该把 DB 当成仅是一个存储而已,靠分级缓存策略来层层抵挡缓存失效,不让请求打到 DB。
- 手段:
- 由远及近分层建立缓存,越靠近前端,缓存片段越大(或存储粒度越大)。
- 上一层的缓存失效,可以靠下一级的缓存迅速重建。
- 目的:
- 避免系统产生抖动。
- 减少缓存雪崩,防止 DB 连接数暴涨、响应变慢,连累前端应用连接数持续高涨、最后宕机。

图2 缓存控制体系(图出自 http://www.alidata.org/archives/1789 )
2.6.缓存重建
既然有缓存过期,自然有缓存重建。
热点数据的缓存重建,无论是本地缓存还是远端缓存,都有必要加锁来确保进程内同一时刻只有一个 Worker 负责重建,甚至利用分布式锁保证集群环境下只有一个重建者,避免缓存雪崩时的 Race Condition。TimYang 早在2010年在《Memcache mutex设计模式》中描述过如下风险:”在大并发的场合,当cache失效时,大量并发同时取不到cache,会同一瞬间去访问db并回设cache,可能会给系统带来潜在的超负荷风险。我们曾经在线上系统出现过类似故障。“孙立将这种场景称为 cache key mutex 问题[注7]。

图3 cache key mutex 问题的解决(图出自 http://www.cnblogs.com/sunli/archive/2010/07/27/cache_key_mutex.html)
简 而言之,缓存重建时,当多个 Client 对同一个缓存数据发起请求时,会在客户端采用加锁等待的方式,对同一个 CacheKey 的重建需要获取到相应的排他锁才行,只有拿到锁的 Client 才能访问数据库重建缓存,其他的 Client 都需要等待这个拿到锁的 Client 重建好缓存后直接读缓存。这样,对同一个缓存数据,只有一次数据库重建访问。但是如果访问分散比较严重,还是会瞬间对数据库造成非常大的压 力。
当然也可以不加(悲观)锁,那么多线程并发读写同一个 cache key 可能会带来“ABA问题”。
解决方法很简单:memcached 1.2.5以及更高版本提供了 gets 和 cas 命令。如果使用 gets 命令查询某个键值,memcached 会返回该键值的唯一标识 casUnique。如果覆写了这个键值并想把它写回到 memcached 中,可以通过 cas 命令把那个 casUnique 一起发送给 memcached。如果该键值存放在 memcached 中的 casUnique 与提供的一致,写操作将会成功。如果另一个进程在这期间也修改了这个键值,那么该键值存放在 memcached 中的 casUnique 将会改变,写操作就会失败。
2.7.缓存永不过期
因为担心缓存失效带来的系统抖动,所以有些业务场景会让缓存永不过期,数据变化时,由后端负责维护缓存数据一致性。
2.8.电商场景里的缓存计数器:秒杀和超卖
我们在秒杀和防超卖场景里的实现逻辑类似于淘宝这篇博客[注3]所提及的”分布式缓存计数器“,所以我就直接照搬过来了:
|
分布式缓存的另一个应用场景是缓存计数器。 对于多服务器的系统,分布式缓存提供了统一的存储和原子操作,便于集群环境下的使用。库存计数器是分布式缓存的一个典型应用场景, 对于集群中的每一台机器,库存都应该是一个统一的值,因此使用本地缓存记录库存,数据肯定是不准确的(下面会陈述例外情况)。因此,统一的存储空间是必要 的条件。 由于库存数据被多台机器共享,因此,必须使用锁机制控制多个请求的并行并发问题。基于这样的机制就可以实行库存技术器的作用,防止货物超卖。最近的积分商城超值兑换就是使用的这种机制。 这种机制下,需要注意操作的逻辑顺序,错误的顺序会导致意想不到的结果。积分兑换的业务流程为,用户看到要抢兑的商品,如果库存大于0,则用户可以点击抢兑操作,这时用户会获得兑换该商品的权限,从而优惠购买,这时库存商品应该减一。 如果完全按照这个业务流程,我们会完成下面这三步操作:
乍一看这样的逻辑是很正常的,但是考虑一下异常情况,就会发现它防不住超卖。如果库存只有一件,那么多个用户并发验证库存时,都大于0。这样并发的多个用户都会获得优惠资格,产生了超卖。 正确的逻辑为:
这样的方法,无法保证缓存中的值一定大于等于0,因为并发的发生会把缓存减为负数,但是,真正能够优惠购买的用户一定是小于等于库存数的。因为,每次原子减操作后,只有返回的库存值大于等于零的用户才能够获得购买资格。无论并发量有多大,原子操作都会成功的防止超卖的发生。 |
|
对于上述的逻辑,可以应对绝大多数的情况。
但是随着量的增加,这种方式也有风险。当用户量极大、货物的库存极少时,就变成了秒杀。这个时候,大量的用户涌入分布式缓存减库存,对分布式缓存有极大冲 击,一旦分布式缓存挂掉,秒杀活动也就宣告失败。使用分布式缓存,目的是为了让用户准确的看到剩余库存数 目,秒杀活动非常快,用户还没有看清楚库存,活动就结束了。其实用户只关心有没有秒到商品,并不关心库存的剩余数量,因此,库存减得准不准确并不是主要矛盾,这时就可以放弃分布式缓存的设计,转而使用本地缓存存储库存数,这也就是本地缓存使用的第二个场景。
比如,一共有10件商品,2台机器,可以设置每台机器的本地内存中库存等于10,那么对于外网的千万个用户,就可以有20个人抢到商品,剩下的人都 被挡在库存之外。当这20个人抢到后,就可以实现另一个处理逻辑,从20个人中选出10个真正中标的人,获得10个商品的购买权限。这个选择的逻辑非常灵 活,可随意定制。但是从20选10的操作,无论如何也比从千千万万个人中选10要好的多,这样可以确保秒杀的安全完成。
如果秒杀的人继续增多,那么也可以通过客户端(即javascript)设置格挡率的方法,使少量的用户可以发出请求到服务器,绝大多数的用户都被挡在浏览器上。(注:一些技术人士在2013年吐槽小米网站抢购小米手机时,浏览器模拟排队等待其实没有发出任何网络请求,这就是客户端格挡率生效的结果。)
|
-未完待续-
备注参考资源:
1,2013,淘宝中间件团队,说说会话串号;
2,2012,腾讯Alloy团队,【Web缓存机制概述】2 – Web浏览器的缓存机制;
3,2013,淘宝搜索技术,关于缓存(上);
4,2013,范凯,Web应用的缓存设计模式;
5,2012,kenny,Cache Reload机制设计和实现(防止cache失效引发雪崩) (注:只看他的故障现象即可);
6,2010,timyang,Memcache mutex设计模式;
赠图几枚:
Lindsey Stirling的小提琴专辑 http://music.douban.com/programme/276131

Owl City专辑 http://music.douban.com/programme/57676

Lenka专辑 www.xiami.com/album/428785




相关推荐
Web开发基本准则主要关注Web应用的安全性和性能优化。在Web访问安全方面,有几个核心概念和技术值得深入理解: 1. **CSRF(Cross-Site Request Forgery,跨站请求伪造)**:这是一种网络攻击方式,攻击者通过伪造...
1、该资源内项目代码经过严格调试,下载即用确保可以运行! 2、该资源适合计算机相关专业(如计科、人工智能、大数据、数学、电子信息等)正在做课程设计、期末大作业和毕设项目的学生、或者相关技术学习者作为学习资料参考使用。 3、该资源包括全部源码,需要具备一定基础才能看懂并调试代码。 新能源车联网项目案例.zip新能源车联网项目案例.zip新能源车联网项目案例.zip 新能源车联网项目案例.zip新能源车联网项目案例.zip新能源车联网项目案例.zip 新能源车联网项目案例.zip新能源车联网项目案例.zip新能源车联网项目案例.zip 新能源车联网项目案例.zip新能源车联网项目案例.zip新能源车联网项目案例.zip 新能源车联网项目案例.zip新能源车联网项目案例.zip新能源车联网项目案例.zip 新能源车联网项目案例.zip新能源车联网项目案例.zip新能源车联网项目案例.zip 新能源车联网项目案例.zip新能源车联网项目案例.zip新能源车联网项目案例.zip
内容概要:本文详细介绍了码垛机程序的设计与实现,重点探讨了维伦通触摸屏与三菱PLC之间的协同工作。文中首先介绍了硬件基础,即维伦通触摸屏作为人机交互界面,三菱PLC作为控制系统的大脑。接着,通过具体的梯形图和代码示例,解释了三菱PLC如何通过逻辑运算控制码垛机的各项动作,如抓取、移动和堆叠。同时,文章还讲解了触摸屏与PLC的数据通信方法,以及如何通过触摸屏设置码垛参数并传递给PLC。此外,文章深入讨论了伺服轴控制、气缸动作时序、异常处理模块、模块化设计等方面的技术细节,并提供了许多调试和优化的实际经验。 适合人群:从事工业自动化领域的工程师和技术人员,尤其是对PLC编程和人机界面设计有一定基础的人群。 使用场景及目标:适用于需要深入了解码垛机自动化控制原理及其编程实现的专业人士。主要目标是帮助读者掌握维伦通触摸屏与三菱PLC的协同编程技巧,提高码垛机的控制精度和工作效率。 其他说明:文章不仅提供了理论知识,还包括了许多实际案例和调试技巧,有助于读者更好地理解和应用相关技术。
内容概要:本文详细介绍了基于51单片机的PID闭环转速测量调节控制器的设计与实现。首先简述了PID控制原理,即通过比例、积分、微分三个环节来调整系统输出,确保转速稳定。接着阐述了硬件连接方式,包括光电编码器用于转速测量和PWM信号控制电机转速的方法。文中提供了完整的C语言源码,涵盖定时器中断、外部中断、PID算法实现以及PWM输出控制等方面。此外,还讨论了仿真验证过程,利用Proteus软件搭建电路并测试PID控制效果。最后,针对常见问题如积分饱和、硬件故障等提出了优化建议。 适合人群:对嵌入式系统和控制系统感兴趣的电子工程师、单片机爱好者及高校相关专业学生。 使用场景及目标:适用于学习51单片机编程、掌握PID控制算法及其应用、进行电机转速控制实验等场景。目标是帮助读者理解PID控制原理,学会编写相应的C语言代码,并能够独立完成类似项目的开发。 其他说明:文中提供的代码片段可以直接应用于实际项目中,同时附带了一些调试技巧和注意事项,有助于提高开发效率和成功率。
内容概要:本文详细介绍了如何使用粒子群算法(Particle Swarm Optimization, PSO)解决光伏发电系统中因阴影遮蔽造成的多峰值最大功率点跟踪(MPPT)问题。首先解释了阴影遮蔽对光伏系统性能的影响以及传统MPPT算法在此情况下存在的局限性。接着阐述了粒子群算法的基本原理及其优势,特别是在处理非线性和多模态优化问题方面的表现。然后展示了如何在Matlab/Simulink环境下利用S函数编写PSO算法的具体步骤,包括初始化参数设定、粒子位置与速度更新规则、适应度评估等环节。最后通过实验数据验证了所提方法的有效性,证明相比传统算法,PSO能够在更短时间内找到全局最优解,显著提高了光伏系统的发电效率。 适用人群:从事新能源研究特别是光伏领域的科研工作者和技术人员,以及对智能优化算法感兴趣的学者。 使用场景及目标:适用于需要改进现有MPPT算法以应对复杂光照条件的应用场合,旨在提高光伏系统的能量转换效率,确保在各种环境因素影响下仍能稳定运行于最大功率点附近。 其他说明:文中提供的代码片段仅为示例,实际应用时需根据具体情况进行适当调整。此外,对于初学者来说,建议先掌握基本概念后再尝试动手实践。
《从DeepSeek到品牌跃迁(AI之于品牌的机遇与挑战)》
内容概要:本文详细介绍了使用COMSOL和Python进行氩灯等离子体放电过程的模拟。首先,作者展示了基础模型参数配置,包括粒子密度、电子温度、离子迁移率等,并解释了这些参数的选择依据。接着,通过MATLAB和Python代码实现了电场计算、电流密度计算以及等离子体雪崩效应的模拟。文中还强调了时间步长控制的重要性,特别是自适应时间步长算法的应用。此外,作者利用Matplotlib和OpenGL进行了动态可视化,生动展现了放电过程中电子密度云图的演变和等离子体辉光的效果。最后,作者分享了一些实用的经验和技巧,如避免数值发散、优化计算效率等。 适合人群:对等离子体物理、数值模拟感兴趣的科研人员和技术爱好者。 使用场景及目标:适用于研究等离子体放电机制、优化模拟算法、提高计算效率以及创建逼真的等离子体可视化效果。目标是帮助读者深入理解氩灯放电的物理过程,并掌握相关模拟技术和工具。 其他说明:文章不仅提供了详细的代码实现,还分享了许多实践经验,如参数选择、数值稳定性和性能优化等方面的心得。这对于从事类似研究的人来说非常有价值。
内容概要:本文详细介绍了AES(自动紧急转向)系统的工作原理及其背后的多种控制算法模型。首先探讨了基于动态TTC(碰撞时间)阈值的安全距离模型,用于决定何时进行转向。接着讨论了五次多项式路径规划算法,确保车辆在短时间内生成平滑的避障轨迹。此外,还比较了传统的纯跟踪算法和现代的MPC(模型预测控制)算法在不同速度下的表现,并解释了它们各自的优缺点。最后,文章提到在联合仿真过程中遇到的一些挑战,如轮胎动力学修正和版本兼容性问题,以及如何通过调整参数来提升系统性能。 适合人群:对自动驾驶技术和车辆控制系统感兴趣的工程师和技术爱好者。 使用场景及目标:适用于研究和开发自动驾驶车辆的团队,旨在帮助他们理解和改进自动紧急转向系统的设计和实施。 其他说明:文中提供了大量MATLAB、C/C++和Python代码片段,展示了具体的技术细节和实现方法。同时强调了实际测试中的经验和教训,对于从事相关领域的研究人员具有很高的参考价值。
OpenGL是一种强大的图形库,用于创建2D和3D图形,广泛应用于游戏开发、科学可视化、工程设计等领域。在这个项目中,我们看到一个基于OpenGL的机械臂运动仿真程序,它能够实现机械臂在四个方向上的旋转。这样的模拟对于理解机械臂的工作原理、机器人控制算法以及进行虚拟环境中的机械臂运动测试具有重要意义。 我们需要了解OpenGL的基础知识。OpenGL是一个跨语言、跨平台的编程接口,用于渲染2D和3D矢量图形。它提供了大量的函数来处理图形的绘制,包括几何形状的定义、颜色设置、光照处理、纹理映射等。开发者通过OpenGL库调用这些函数,构建出复杂的图形场景。 在这个机械臂仿真程序中,C#被用来作为编程语言。C#通常与Windows平台上的.NET Framework配合使用,提供了一种面向对象的、类型安全的语言,支持现代编程特性如LINQ、异步编程等。结合OpenGL,C#可以构建高性能的图形应用。 机械臂的运动仿真涉及到几个关键的计算和控制概念: 1. **关节角度**:机械臂的每个部分(或关节)都有一个或多个自由度,表示为关节角度。这些角度决定了机械臂各部分的位置和方向。 2. **正向运动学**:根据关节角度计算机械臂末端执行器(如抓手)在空间中的位置和方向。这涉及将各个关节的角度转换为欧拉角或四元数,然后转化为笛卡尔坐标系的X、Y、Z位置和旋转。 3. **反向运动学**:给定末端执行器的目标位置和方向,计算出各关节所需的理想角度。这是一个逆向问题,通常需要解决非线性方程组。 4. **运动规划**:确定从当前状态到目标状态的路径,确保机械臂在运动过程中避免碰撞和其他约束。 5. **OpenGL的使用**:在OpenGL中,我们首先创建几何模型来表示机械臂的各个部分。然后,使用矩阵变换(如旋转、平移和缩放)来更新关节角度对模型的影响。这些变换组合起来,形成机械臂的动态运动。 6. **四向旋转**:机械臂可能有四个独立的旋转轴,允许它在X、Y、Z三个轴上旋转,以及额外的绕自身轴线的旋转。每个轴的旋转都由对应的关节角度控制。 7. **交互控制**:用户可能可以通过输入设备(如鼠标或键盘)调整关节角度,实时观察机械臂的运动。这需要将用户输入转换为关节角度,并应用到运动学模型中。 8. **图形渲染**:OpenGL提供了多种渲染技术,如深度测试、光照模型、纹理映射等,可以用于提高机械臂模拟的真实感。例如,可以添加材质和纹理来模拟金属表面,或者使用光照来增强立体感。 这个项目结合了OpenGL的图形渲染能力与C#的编程灵活性,构建了一个可以直观展示机械臂运动的仿真环境。通过理解并实现这些关键概念,开发者不仅能够学习到图形编程技巧,还能深入理解机器人学的基本原理。
在当今社会,随着城市交通管理需求的日益增长,数据驱动的决策机制变得越来越重要。深圳作为中国的一线城市,拥有庞大的交通网络和复杂多变的交通状况,因此,构建精确的交通管理系统显得尤为迫切。为此,深圳市政府开放平台提供了宝贵的道路信息数据,形成了可供机器学习项目开发使用的“深圳道路交通数据集”。 该数据集包含了深圳市内各个区域的详细道路信息,涵盖了交通流量、车速、事故记录、天气条件等多种类型的数据,能够为研究者和开发者提供丰富的学习和实验资源。通过对这些数据的深入分析,可以发现交通流量的规律、预测交通拥堵、制定更为有效的交通管理策略。 数据集中的“traffic.sql”文件,很可能是一个结构化查询语言(SQL)文件,用于存储和管理道路交通数据集的数据库。它可能包含了创建表格、索引、视图以及存储过程等SQL命令,以便用户能够更加方便地对数据进行查询和管理。这类文件是数据库维护和操作的基础,对于数据科学家和工程师来说,掌握其内容能够更高效地进行数据的导入、导出、清洗和分析。 而“获取来源.txt”文件则可能提供了关于数据集来源和数据获取方式的详细描述。它可能包含了数据采集的时间、地点、方式以及数据的更新频率等信息。这些背景信息对于确保数据分析的可靠性和有效性至关重要,因为它们能够帮助用户理解数据的局限性和适用范围,从而使分析结果更加准确和有针对性。 除了上述两个文件之外,数据集可能还包含了其他多种格式的文件,比如CSV、JSON或Excel表格等,以便用户根据不同的使用场景和需求选择合适的数据格式。无论是在交通流量预测、事故分析、路线规划还是在智能交通系统开发等方向,这个数据集都能提供重要的支持。 深圳道路交通数据集的开放,不仅体现了政府信息化、透明化的努力,也为研究者和开发者提供了宝贵的实践平台。它将有助于推动交通管理技术的创新和发展,对缓解城市交通压力、提高道路使用效率以及保障交通安全都将起到积极的作用。随着人工智能和机器学习技术的不断进步,此类数据集的应用前景将十分广阔。
内容概要:本文详细介绍了100kW光伏并网发电系统的MATLAB仿真模型,重点探讨了‘增量电导+积分调节器’技术的MPPT控制器和VSC并网控制技术。MPPT控制器通过增量电导法和积分调节器相结合的方式,能够精准跟踪光伏电池的最大功率点,确保系统高效运行。VSC并网控制则实现了直流电到交流电的转换,并通过复杂的电流控制确保并网电流的质量。文中还提供了详细的MATLAB代码片段,展示了各个关键技术的具体实现。 适用人群:适用于具有一定MATLAB编程基础和技术背景的研究人员、工程师以及对光伏并网发电系统感兴趣的学者。 使用场景及目标:①帮助研究人员理解和实现光伏并网发电系统的MPPT控制和VSC并网控制;②提供详细的MATLAB代码示例,便于学习和调试;③探索光伏并网系统的优化方向,提高系统的稳定性和效率。 其他说明:文章不仅解释了理论原理,还分享了许多实用的调试技巧和注意事项,如仿真步长选择、参数设置等,有助于读者更好地掌握相关技术。
内容概要:本文详细介绍了如何利用Matlab/Simulink构建非隔离双向DC/DC变换器(Buck-Boost)的仿真模型,重点探讨了电压外环电流内环双闭环控制策略的设计与实现。文中不仅涵盖了主电路参数的选择、PWM信号生成、模式切换逻辑等硬件细节,还深入讨论了PI参数整定方法以及仿真过程中常见的陷阱和优化技巧。通过具体的实验数据展示了该系统的快速响应特性和稳定性,特别是在充放电模式切换时的表现。 适合人群:电力电子工程师、科研工作者、高校师生等对双向DC/DC变换器感兴趣的专业人士。 使用场景及目标:适用于研究和开发高效稳定的双向DC/DC变换器,特别是应用于新能源储能系统中,旨在提高系统的转换效率和可靠性。 其他说明:文中提供了大量实用的技术细节和实践经验分享,对于理解和掌握双向DC/DC变换器的工作原理及控制策略非常有帮助。同时提醒读者注意一些容易忽视的问题,如死区时间和电感饱和等,确保仿真结果更加贴近实际情况。
内容概要:本文详细介绍了如何利用Python构建一个图形用户界面(GUI)程序,用于实现语音去噪。该程序主要采用三种核心技术:小波变换、变分模态分解(VMD)以及维纳滤波。首先,通过tkinter库搭建了一个简洁易用的GUI界面,允许用户选择纯净语音文件和噪声文件并将其混合。接着,在信号处理阶段,依次运用小波变换进行初步去噪,VMD分解将信号分为多个模态,最后使用维纳滤波对各模态进行精细调整。文中不仅提供了详细的代码示例,还讨论了一些常见的实现技巧和注意事项,如参数设置、信号长度匹配、信噪比计算等。 适合人群:对语音处理感兴趣的开发者和技术爱好者,尤其是有一定Python编程基础的人士。 使用场景及目标:适用于希望深入了解语音去噪原理及其具体实现的研究人员或工程师。通过该项目,读者能够掌握如何结合多种算法提高语音质量,同时学会如何使用Python的相关库来构建实用的应用程序。 其他说明:作者强调了实践中的一些重要细节,例如参数的选择对于最终效果的影响,以及如何处理不同类型的声音文件。此外,还提到了一些潜在的问题解决方案,如避免因数据格式不当导致的异常情况。
内容概要:本文深入探讨了AUTOSAR OS的发展及其与OSEK OS的关系,强调了AUTOSAR OS在汽车电子控制单元(ECU)中的应用。文章首先回顾了OSEK OS的基本特性,包括基于事件触发的操作机制、实时中断处理以及错误处理服务等,指出AUTOSAR OS在其基础上进行了扩展。接着介绍了AUTOSAR OS的四个扩展分类(SC1至SC4),并解释了如何根据项目需求和硬件资源选择合适的OS扩展类型。最后,详细描述了AUTOSAR OS的五大基本对象(Counter、Alarm、Schedule Table、Tasks、ISRs),阐述了它们的作用及相互关系,如Counter为Alarm和Schedule Table提供时间基准,Tasks作为OS调度的基本单元,ISRs处理中断等。; 适合人群:从事汽车电子开发的技术人员,尤其是对AUTOSAR OS有一定了解或有兴趣深入了解其架构和功能的专业人士。; 使用场景及目标:①理解AUTOSAR OS相较于OSEK OS的改进之处;②掌握不同扩展级别的特点,以便为具体的ECU产品选择最合适的OS版本;③熟悉五大基本对象的功能和应用场景,提高在AUTOSAR架构下的系统设计能力。; 其他说明:由于AUTOSAR OS与OSEK OS紧密相关,建议读者先了解ISO 17356-3标准,这有助于更好地理解AUTOSAR OS的特性和优势。此外,在实际应用中,选择OS扩展类型时应综合考虑功能安全、信息安全需求以及芯片硬件资源。
2025免费微信小程序毕业设计成品,包括源码+数据库+往届论文资料,附带启动教程和安装包。 启动教程:https://www.bilibili.com/video/BV1BfB2YYEnS 讲解视频:https://www.bilibili.com/video/BV1BVKMeZEYr 技术栈:Uniapp+Vue.js+SpringBoot+MySQL。 开发工具:Idea+VSCode+微信开发者工具。
内容概要:本文详细介绍了如何使用MATLAB及其工具箱Simulink和Simscape进行直角坐标机器人的逆向运动学仿真。首先,通过导入Scape模型并正确设置坐标系,确保模型的准确性。接着,利用fsolve函数求解姿态误差函数,实现末端执行器到达指定坐标的目标。文中还强调了在搭建Simscape模型时应注意的细节,如选择正确的关节模块、设置合理的物理参数以及优化求解器配置。此外,提供了多个实用技巧,包括添加路径约束、处理摩擦系数、优化仿真速度等。最后,通过实例展示了如何验证逆向运动学的效果,并给出了常见的调试方法。 适合人群:具有一定MATLAB基础并对机器人运动控制感兴趣的工程师和技术爱好者。 使用场景及目标:适用于希望深入了解直角坐标机器人逆向运动学原理的研究人员,以及希望通过仿真手段优化机器人控制系统的设计人员。目标是掌握如何使用MATLAB和Simscape进行高效的机器人运动仿真。 其他说明:文章不仅提供了详细的代码示例,还分享了许多实践经验,帮助读者更好地理解和应用相关技术。
内容概要:本文详细介绍了利用MATLAB进行语音信号处理和去噪的方法,重点在于使用低通巴特沃斯滤波器去除音频中的特定频率噪声。首先,通过audioread函数读取音频文件并展示其时域和频域图像。然后,作者手动实现了离散傅里叶变换(DFT)函数,并将其应用于频谱分析。接着,文中展示了如何加入人为噪声(如800Hz的正弦噪声)并对含有噪声的信号进行处理。为了去除这些噪声,设计了一个6阶低通巴特沃斯滤波器,设置合适的截止频率以保留人声的同时抑制高频噪声。对于高斯白噪声,则讨论了低通滤波器的效果及其局限性。最后,验证了自定义DFT函数的准确性。 适合人群:具有一定MATLAB基础和技术背景的研究人员、学生或工程师。 使用场景及目标:适用于希望深入了解语音信号处理技术的人士,特别是那些想要掌握如何使用MATLAB实现简单有效的数字滤波器来改善音频质量的学习者。 其他说明:本文不仅提供了具体的代码示例,还解释了每个步骤背后的理论依据,帮助读者更好地理解和应用相关概念。此外,它强调了实际操作过程中可能会遇到的问题及解决方案,如相位延迟的影响等。
内容概要:本文详细介绍了基于Voronoi图的最小化围捕算法在电动汽车、主动配电网及电力系统规划中的MATLAB复现。首先解释了Voronoi图的基本概念及其在围捕算法中的应用,接着展示了具体的MATLAB代码实现,包括初始化参数、随机生成位置、计算Voronoi图、围捕算法的具体实现步骤。文中还探讨了该算法在电动汽车充电路径规划、分布式电源与负荷匹配方面的潜在应用价值。通过动态生成Voronoi图来分割追捕区域,使每个追捕者负责自己区域内的逃逸者,提高了资源分配和调度的效率。 适合人群:对电力系统规划、电动汽车技术和MATLAB编程感兴趣的科研人员和技术开发者。 使用场景及目标:适用于需要优化资源分配和提高系统稳定性的情景,如电动汽车充电网络规划、智能电网管理等。目标是通过算法优化,提高充电效率和电力分配合理性,保障系统的稳定运行。 其他说明:文中提供了详细的代码片段和实现思路,有助于读者理解和复现实验。同时,讨论了一些优化技巧,如动态更新Voronoi图、调整速度因子等,使得算法更加高效实用。
内容概要:大唐杯是由中国通信学会主办的全国性大学生通信技术大赛,主要面向高校本科生和研究生,旨在推动通信领域的技术创新和人才培养。比赛涵盖5G技术、物联网与边缘计算、人工智能与大数据在通信中的应用以及通信网络部署与优化等内容,分为省赛(理论+实践)和全国总决赛(复杂实操与答辩)。该比赛在通信、电子信息类专业认可度高,对保研和就业有帮助。备赛建议包括学习5G基础知识、熟悉仿真工具和实践操作训练,并参考往届真题和官方资料。比赛报名时间通常为每年1-3月,省赛在4月进行,全国总决赛在6-7月举行。; 适合人群:全国高校本科生、研究生,尤其是通信、电子信息、计算机、电子、物联网等相关专业的学生。; 使用场景及目标:①为有志于从事通信、信息技术领域工作的学生提供实战机会;②提升学生在5G、物联网、人工智能等前沿技术方面的能力;③帮助学生获得保研加分和更好的就业机会。; 其他说明:非通信专业的学生也可以参加,但需自学部分通信知识。比赛强调理论与实践相结合,建议团队成员合理分工,分别负责理论、仿真编程和实操。对于没有实验设备的学生,可以通过仿真软件和开源项目进行练习。
1、该资源内项目代码经过严格调试,下载即用确保可以运行! 2、该资源适合计算机相关专业(如计科、人工智能、大数据、数学、电子信息等)正在做课程设计、期末大作业和毕设项目的学生、或者相关技术学习者作为学习资料参考使用。 3、该资源包括全部源码,需要具备一定基础才能看懂并调试代码。 Android实现的雷达图(Radar Chart),可用于实现对比展示,可旋转.zip Android实现的雷达图(Radar Chart),可用于实现对比展示,可旋转.zip Android实现的雷达图(Radar Chart),可用于实现对比展示,可旋转.zip Android实现的雷达图(Radar Chart),可用于实现对比展示,可旋转.zip Android实现的雷达图(Radar Chart),可用于实现对比展示,可旋转.zip Android实现的雷达图(Radar Chart),可用于实现对比展示,可旋转.zip Android实现的雷达图(Radar Chart),可用于实现对比展示,可旋转.zip Android实现的雷达图(Radar Chart),可用于实现对比展示,可旋转.zip Android实现的雷达图(Radar Chart),可用于实现对比展示,可旋转.zip Android实现的雷达图(Radar Chart),可用于实现对比展示,可旋转.zip Android实现的雷达图(Radar Chart),可用于实现对比展示,可旋转.zip Android实现的雷达图(Radar Chart),可用于实现对比展示,可旋转.zip Android实现的雷达图(Radar Chart),可用于实现对比展示,可旋转.zip Android实现的雷达图(Radar Chart),可用于实现对比展示,可旋转.zip