
ن½œè€…: Jet Mah from Javaه ‚
ه£°وکژ: هڈ¯ن»¥éه•†ن¸ڑو€§ن»»و„ڈ转载, 转载و—¶è¯·هٹ،ه؟…ن»¥è¶…链وژ¥ه½¢ه¼ڈو ‡وکژو–‡ç« هژںه§‹ه‡؛ه¤„م€پن½œè€…ن؟،وپ¯هڈٹو¤ه£°وکژï¼پ
ه¦‚وœو²،وœ‰è؟›è،Œè®¾ç½®çڑ„è¯ï¼Œهœ¨ن½؟用MyEclipseçڑ„ç»ڈه¸¸ه‡؛çژ°ه¦‚ن¸‹ه›¾و‰€ç¤؛ه†…هکن¸چ足çڑ„وڈگç¤؛م€‚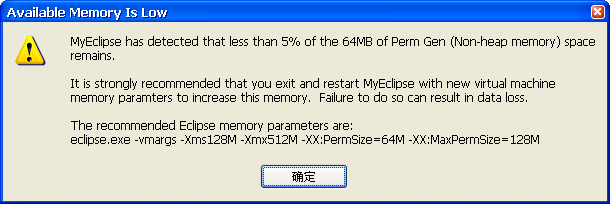
وڈگç¤؛ن¸è¯´çڑ„ه¾ˆوکژ白ï¼ڑ“MyEclipse has detected that less than 5% of the 64MB of Perm Gen (Non-heap memory) space remains.â€و„ڈو€وک¯è¯´ه½“ه‰چهڈھوœ‰ه°ڈن؛ژ5%çڑ„éه †ه†…هکوک¯ç©؛é—²çڑ„م€‚و‰€ن»¥وˆ‘ن»¬هڈھè¦په°†è؟™ن¸ھه€¼è®¾ç½®ه¤§ن¸€ن؛›ه°±هڈ¯ن»¥ن؛†م€‚
وڈگç¤؛ن¸ç»™ه‡؛ن؛†è®¾ç½®çڑ„هڈ‚و•°ï¼ڑ
- -vmargs -Xms128M -Xmx512M -XX:PermSize=64M -XX:MaxPermSize=128M
è؟™é‡Œوœ‰ه‡ ن¸ھé—®é¢کï¼ڑ
1. هگ„ن¸ھهڈ‚و•°çڑ„هگ«ن¹‰ن»€ن¹ˆï¼ں
2. ن¸؛ن»€ن¹ˆوœ‰çڑ„وœ؛ه™¨وˆ‘ه°†-Xmxه’Œ-XX:MaxPermSize都设置ن¸؛512Mن¹‹هگژEclipseهڈ¯ن»¥هگ¯هٹ¨ï¼Œè€Œوœ‰ن؛›وœ؛ه™¨و— و³•هگ¯هٹ¨ï¼ں
3. ن¸؛ن½•ه°†ن¸ٹé¢çڑ„هڈ‚و•°ه†™ه…¥هˆ°eclipse.iniو–‡ن»¶Eclipseو²،وœ‰و‰§è،Œه¯¹ه؛”çڑ„设置ï¼ں
ن¸‹é¢وˆ‘ن»¬ن¸€ن¸€è؟›è،Œه›ç”
1. هگ„ن¸ھهڈ‚و•°çڑ„هگ«ن¹‰ن»€ن¹ˆï¼ں
هڈ‚و•°ن¸-vmargsçڑ„و„ڈو€وک¯è®¾ç½®JVMهڈ‚و•°ï¼Œو‰€ن»¥هگژé¢çڑ„ه…¶ه®éƒ½وک¯JVMçڑ„هڈ‚و•°ن؛†ï¼Œوˆ‘ن»¬é¦–ه…ˆن؛†è§£ن¸€ن¸‹JVMه†…هکç®،çگ†çڑ„وœ؛هˆ¶ï¼Œç„¶هگژه†چ解é‡ٹو¯ڈن¸ھهڈ‚و•°ن»£è،¨çڑ„هگ«ن¹‰م€‚
ه †(Heap)ه’Œéه †(Non-heap)ه†…هک
وŒ‰ç…§ه®کو–¹çڑ„说و³•ï¼ڑ“Java è™ڑو‹ںوœ؛ه…·وœ‰ن¸€ن¸ھه †ï¼Œه †وک¯è؟گè،Œو—¶و•°وچ®هŒ؛هںں,و‰€وœ‰ç±»ه®ن¾‹ه’Œو•°ç»„çڑ„ه†…هکه‡ن»ژو¤ه¤„هˆ†é…چم€‚ه †وک¯هœ¨ Java è™ڑو‹ںوœ؛هگ¯هٹ¨و—¶هˆ›ه»؛çڑ„م€‚â€â€œهœ¨JVMن¸ه †ن¹‹ه¤–çڑ„ه†…هک称ن¸؛éه †ه†…هک(Non-heap memory)â€م€‚هڈ¯ن»¥çœ‹ه‡؛JVMن¸»è¦پç®،çگ†ن¸¤ç§چç±»ه‹çڑ„ه†…هکï¼ڑه †ه’Œéه †م€‚简هچ•و¥è¯´ه †ه°±وک¯Javaن»£ç پهڈ¯هڈٹçڑ„ه†…هک,وک¯ç•™ç»™ه¼€هڈ‘ن؛؛ه‘کن½؟用çڑ„ï¼›éه †ه°±وک¯JVM留给è‡ھه·±ç”¨çڑ„,و‰€ن»¥و–¹و³•هŒ؛م€پJVMه†…部ه¤„çگ†وˆ–ن¼کهŒ–و‰€éœ€çڑ„ه†…هک(ه¦‚JIT编译هگژçڑ„ن»£ç پ缓هک)م€پو¯ڈن¸ھ类结و„(ه¦‚è؟گè،Œو—¶ه¸¸و•°و± م€په—و®µه’Œو–¹و³•و•°وچ®)ن»¥هڈٹو–¹و³•ه’Œو„é€ و–¹و³•çڑ„ن»£ç پ都هœ¨éه †ه†…هکن¸م€‚ه †ه†…هکهˆ†é…چ
JVMهˆه§‹هˆ†é…چçڑ„ه†…هکç”±-XmsوŒ‡ه®ڑ,é»ک认وک¯ç‰©çگ†ه†…هکçڑ„1/64ï¼›JVMوœ€ه¤§هˆ†é…چçڑ„ه†…هکç”± -XmxوŒ‡ه®ڑ,é»ک认وک¯ç‰©çگ†ه†…هکçڑ„1/4م€‚é»ک认ç©؛ن½™ه †ه†…هکه°ڈن؛ژ40%و—¶ï¼ŒJVMه°±ن¼ڑه¢ه¤§ه †ç›´هˆ°-Xmxçڑ„وœ€ه¤§é™گهˆ¶ï¼›ç©؛ن½™ه †ه†…هکه¤§ن؛ژ70%و—¶ï¼ŒJVMن¼ڑه‡ڈه°‘ه †ç›´هˆ°-Xmsçڑ„وœ€ه°ڈé™گهˆ¶م€‚ه› و¤وœچهٹ،ه™¨ن¸€èˆ¬è®¾ç½®-Xmsم€پ-Xmx相ç‰ن»¥éپ؟ه…چهœ¨و¯ڈو¬،GC هگژè°ƒو•´ه †çڑ„ه¤§ه°ڈم€‚éه †ه†…هکهˆ†é…چ
JVMن½؟用-XX:PermSize设置éه †ه†…هکهˆه§‹ه€¼ï¼Œé»ک认وک¯ç‰©çگ†ه†…هکçڑ„1/64;由XX:MaxPermSize设置وœ€ه¤§éه †ه†…هکçڑ„ه¤§ه°ڈ,é»ک认وک¯ç‰©çگ†ه†…هکçڑ„1/4م€‚JVMه†…هکé™گهˆ¶(وœ€ه¤§ه€¼)
首ه…ˆJVMه†…هکé™گهˆ¶ن؛ژه®é™…çڑ„وœ€ه¤§ç‰©çگ†ه†…هک(ه؛ںè¯ï¼په‘µه‘µ),هپ‡è®¾ç‰©çگ†ه†…هکو— é™گه¤§çڑ„è¯ï¼ŒJVMه†…هکçڑ„وœ€ه¤§ه€¼è·ںو“چن½œç³»ç»ںوœ‰ه¾ˆه¤§çڑ„ه…³ç³»م€‚简هچ•çڑ„说ه°±32ن½چه¤„çگ†ه™¨è™½ç„¶هڈ¯وژ§ه†…هکç©؛é—´وœ‰4GB,ن½†وک¯ه…·ن½“çڑ„و“چن½œç³»ç»ںن¼ڑç»™ن¸€ن¸ھé™گهˆ¶ï¼Œè؟™ن¸ھé™گهˆ¶ن¸€èˆ¬وک¯ 2GB-3GB(ن¸€èˆ¬و¥è¯´Windowsç³»ç»ںن¸‹ن¸؛1.5G-2G,Linuxç³»ç»ںن¸‹ن¸؛2G-3G),而64bitن»¥ن¸ٹçڑ„ه¤„çگ†ه™¨ه°±ن¸چن¼ڑوœ‰é™گهˆ¶ن؛†م€‚
2. ن¸؛ن»€ن¹ˆوœ‰çڑ„وœ؛ه™¨وˆ‘ه°†-Xmxه’Œ-XX:MaxPermSize都设置ن¸؛512Mن¹‹هگژEclipseهڈ¯ن»¥هگ¯هٹ¨ï¼Œè€Œوœ‰ن؛›وœ؛ه™¨و— و³•هگ¯هٹ¨ï¼ں
é€ڑè؟‡ن¸ٹé¢ه¯¹JVMه†…هکç®،çگ†çڑ„ن»‹ç»چوˆ‘ن»¬ه·²ç»ڈن؛†è§£هˆ°JVMه†…هکهŒ…هگ«ن¸¤ç§چï¼ڑه †ه†…هکه’Œéه †ه†…هک,هڈ¦ه¤–JVMوœ€ه¤§ه†…هک首ه…ˆهڈ–ه†³ن؛ژه®é™…çڑ„物çگ†ه†…هکه’Œو“چن½œç³»ç»ںم€‚و‰€ن»¥è¯´è®¾ç½®VMهڈ‚و•°ه¯¼è‡´ç¨‹ه؛ڈو— و³•هگ¯هٹ¨ن¸»è¦پوœ‰ن»¥ن¸‹ه‡ ç§چهژںه› ï¼ڑ
1) هڈ‚و•°ن¸-Xmsçڑ„ه€¼ه¤§ن؛ژ-Xmx,وˆ–者-XX:PermSizeçڑ„ه€¼ه¤§ن؛ژ-XX:MaxPermSizeï¼›
2) -Xmxçڑ„ه€¼ه’Œ-XX:MaxPermSizeçڑ„و€»ه’Œè¶…è؟‡ن؛†JVMه†…هکçڑ„وœ€ه¤§é™گهˆ¶ï¼Œو¯”ه¦‚ه½“ه‰چو“چن½œç³»ç»ںوœ€ه¤§ه†…هکé™گهˆ¶ï¼Œوˆ–者ه®é™…çڑ„物çگ†ه†…هکç‰ç‰م€‚说هˆ°ه®é™…物çگ†ه†…هکè؟™é‡Œéœ€è¦پ说وکژن¸€ç‚¹çڑ„وک¯ï¼Œه¦‚وœن½ çڑ„ه†…هکوک¯1024MB,ن½†ه®é™…ç³»ç»ںن¸ç”¨هˆ°çڑ„ه¹¶ن¸چهڈ¯èƒ½وک¯1024MB,ه› ن¸؛وœ‰ن¸€éƒ¨هˆ†è¢«ç،¬ن»¶هچ 用ن؛†م€‚
3. ن¸؛ن½•ه°†ن¸ٹé¢çڑ„هڈ‚و•°ه†™ه…¥هˆ°eclipse.iniو–‡ن»¶Eclipseو²،وœ‰و‰§è،Œه¯¹ه؛”çڑ„设置ï¼ں
é‚£ن¸؛ن»€ن¹ˆهگŒو ·çڑ„هڈ‚و•°هœ¨ه؟«وچ·و–¹ه¼ڈوˆ–者ه‘½ن»¤è،Œن¸وœ‰و•ˆè€Œهœ¨eclipse.iniو–‡ن»¶ن¸وک¯و— و•ˆçڑ„ه‘¢ï¼ںè؟™وک¯ه› ن¸؛وˆ‘ن»¬و²،وœ‰éپµه®ˆeclipse.iniو–‡ن»¶çڑ„设置规هˆ™ï¼ڑ
هڈ‚و•°ه½¢ه¦‚“é،¹ ه€¼â€è؟™ç§چه½¢ه¼ڈ,ن¸é—´وœ‰ç©؛و ¼çڑ„需è¦پوچ¢è،Œن¹¦ه†™ï¼Œه¦‚وœه€¼ن¸وœ‰ç©؛و ¼çڑ„需è¦پ用هڈŒه¼•هڈ·هŒ…و‹¬èµ·و¥م€‚و¯”ه¦‚وˆ‘ن»¬ن½؟用-vm C:\Java\jre1.6.0\bin\javaw.exeهڈ‚و•°è®¾ç½®è™ڑو‹ںوœ؛,هœ¨eclipse.iniو–‡ن»¶ن¸è¦په†™وˆگè؟™و ·ï¼ڑ
- -vm
- C:\Java\jre1.6.0\bin\javaw.exe
وŒ‰ç…§ن¸ٹé¢و‰€è¯´çڑ„,وœ€هگژهڈ‚و•°هœ¨eclipse.iniن¸هڈ¯ن»¥ه†™وˆگè؟™ن¸ھو ·هگï¼ڑ
- -vmargs
- -Xms128M
- -Xmx512M
- -XX:PermSize=64M
- -XX:MaxPermSize=128M
ه®é™…è؟گè،Œçڑ„结وœهڈ¯ن»¥é€ڑè؟‡Eclipseن¸â€œHelpâ€-“About Eclipse SDKâ€çھ—هڈ£é‡Œé¢çڑ„“Configuration Detailsâ€وŒ‰é’®è؟›è،Œوں¥çœ‹م€‚
هڈ¦ه¤–需è¦پ说وکژçڑ„وک¯ï¼ŒEclipseهژ‹ç¼©هŒ…ن¸è‡ھه¸¦çڑ„eclipse.iniو–‡ن»¶ه†…ه®¹وک¯è؟™و ·çڑ„ï¼ڑ
- -showsplash
- org.eclipse.platform
- --launcher.XXMaxPermSize
- 256m
- -vmargs
- -Xms40m
- -Xmx256m
ه…¶ن¸â€“launcher.XXMaxPermSize(و³¨و„ڈوœ€ه‰چé¢وک¯ن¸¤ن¸ھè؟وژ¥ç؛؟)è·ں-XX:MaxPermSizeهڈ‚و•°çڑ„هگ«ن¹‰هں؛وœ¬وک¯ن¸€و ·çڑ„,وˆ‘觉ه¾—ه”¯ن¸€çڑ„هŒ؛هˆ«ه°±وک¯ه‰چ者وک¯eclipse.exeهگ¯هٹ¨çڑ„و—¶ه€™è®¾ç½®çڑ„هڈ‚و•°ï¼Œè€Œهگژ者وک¯eclipseو‰€ن½؟用çڑ„JVMن¸çڑ„هڈ‚و•°م€‚ه…¶ه®ن؛Œè€…设置ن¸€ن¸ھه°±هڈ¯ن»¥ن؛†ï¼Œو‰€ن»¥è؟™é‡Œهڈ¯ن»¥وٹٹ–launcher.XXMaxPermSizeه’Œن¸‹ن¸€è،Œن½؟用#و³¨é‡ٹوژ‰م€‚
هڈ‚考资و–™ï¼ڑ
JDK5.0هƒهœ¾و”¶é›†ن¼کهŒ–ن¹‹â€“Don’t Pause
وڈگé—®ï¼ڑه¦‚ن½•è¶…è¶ٹJVMه†…هکé™گهˆ¶ï¼ں
MemoryMXBean (Java 2 Platform SE 5.0)
MyEclipse/Eclipseçڑ„ه†…هکن¼کهŒ–ن¸ژه†…هکن¸چ足çڑ„解ه†³هٹو³•
eclipse.iniو–‡ن»¶çڑ„é—®é¢ک
eclipse ن¸؛ن»€ن¹ˆوٹ¥é”™



相ه…³وژ¨èچگ
م€گو‰“é€ وپé€ںMyEclipseï¼ڑ...و€»ن¹‹ï¼Œçگ†è§£JVMه†…هکç®،çگ†وœ؛هˆ¶ه¹¶هگˆçگ†é…چç½®MyEclipseçڑ„JVMهڈ‚و•°ï¼Œèƒ½وœ‰و•ˆéپ؟ه…چه†…هکن¸چ足问é¢ک,وڈگé«که¼€هڈ‘و•ˆçژ‡م€‚هگŒو—¶ï¼Œه®ڑوœںو£€وں¥ه’Œن¼کهŒ–ه†…هکé…چ置,ن؟وŒپMyEclipseçڑ„稳ه®ڑè؟گè،Œï¼Œوک¯و¯ڈن¸ھJavaه¼€هڈ‘者ه؟…ه¤‡çڑ„وٹ€èƒ½م€‚
### MyEclipseه†…هکن¸چ足ن¸ژJVMه†…هکç®،çگ† #### 1. هگ„ن¸ھهڈ‚و•°çڑ„هگ«ن¹‰ هœ¨وژ¢è®¨ه…·ن½“çڑ„هڈ‚و•°ن¹‹ه‰چ,وˆ‘ن»¬ه…ˆو¥ن؛†è§£ن¸‹JVMه†…هکç®،çگ†çڑ„هں؛وœ¬و¦‚ه؟µم€‚ **JVMه†…هکو¨،ه‹**ن¸»è¦پهŒ…و‹¬ن¸¤ن¸ھ部هˆ†ï¼ڑه †ه†…هک(Heap Memory)ه’Œéه †ه†…هک(Non-Heap Memory)...
ه…³ن؛ژMyEclipseن»£ç پوڈگç¤؛و»وœ؛é—®é¢ک,هڈ¯èƒ½çڑ„هژںه› وœ‰ه¾ˆه¤ڑ,ه¦‚ه†…هکن¸چ足م€پوڈ’ن»¶ه†²çھپوˆ–IDE设置ن¸چه½“ç‰م€‚ن¸€ç§چهڈ¯èƒ½çڑ„解ه†³و–¹و،ˆوک¯ن¼کهŒ–MyEclipseçڑ„ه·¥ن½œه†…هک,é€ڑè؟‡ن؟®و”¹myeclipse.iniو–‡ن»¶ï¼Œه¢هٹ هˆه§‹ه †ه†…هکه’Œوœ€ه¤§ه †ه†…هکهڈ‚و•°ï¼Œن¾‹ه¦‚ï¼ڑ ```...
Delphi 12.3وژ§ن»¶ن¹‹TraeSetup-stable-1.0.12120.exe
هں؛ن؛ژGPRS,GPSçڑ„电هٹ¨و±½è½¦è؟œç¨‹ç›‘وژ§ç³»ç»ںçڑ„设è®،ن¸ژه®çژ°.pdf
ه†…ه®¹و¦‚è¦پï¼ڑوœ¬و–‡è¯¦ç»†ن»‹ç»چن؛†ه¦‚ن½•هˆ©ç”¨MATLAB/Simulink 2018aè؟›è،Œهچ•وœ؛و— ç©·ه¤§ç³»ç»ںçڑ„وڑ‚و€پ稳ه®ڑو€§ن»؟çœںم€‚ن¸»è¦په†…ه®¹هŒ…و‹¬وگه»؛هگŒو¥هڈ‘电وœ؛و¨،ه‹م€پ设置و— ç©·ه¤§ç³»ç»ںç‰و•ˆç”µو؛گم€پé…چç½®و•…éڑœو¨،ه—هڈٹه…¶وژ§هˆ¶ن؟،هڈ·م€پن¼کهŒ–و±‚解ه™¨è®¾ç½®ن»¥هڈٹç»کهˆ¶ه’Œهˆ†وگ转é€ںو³¢ه½¢ه’Œو‘‡و‘†و›²ç؛؟م€‚و–‡ن¸è؟کوڈگن¾›ن؛†ه¤ڑن¸ھه®ç”¨è„ڑوœ¬ï¼Œه¦‚و•…éڑœç±»ه‹هˆ‡وچ¢م€پو‘‡و‘†و›²ç؛؟è®،ç®—ه’Œوپé™گهˆ‡é™¤è§’çڑ„و±‚解و–¹و³•م€‚و¤ه¤–,ن½œè€…هˆ†ن؛«ن؛†ن¸€ن؛›ه®è·µç»ڈéھŒï¼Œه¦‚éپ؟ه…چه¸¸è§پ错误ه’Œوڈگé«کن»؟çœںو•ˆçژ‡çڑ„ه°ڈوٹ€ه·§م€‚ 适هگˆن؛؛群ï¼ڑن»ژن؛‹ç”µهٹ›ç³»ç»ںç ”ç©¶ه’Œن»؟çœںçڑ„ه·¥ç¨‹ه¸ˆه’Œوٹ€وœ¯ن؛؛ه‘ک,ه°¤ه…¶وک¯ه¯¹MATLAB/Simulinkوœ‰ن¸€ه®ڑهں؛ç،€çڑ„用وˆ·م€‚ ن½؟用هœ؛و™¯هڈٹç›®و ‡ï¼ڑ适用ن؛ژ需è¦پè؟›è،Œç”µهٹ›ç³»ç»ںوڑ‚و€پ稳ه®ڑو€§هˆ†وگçڑ„ç ”ç©¶é،¹ç›®وˆ–ه·¥ç¨‹ه؛”用م€‚ن¸»è¦پç›®و ‡وک¯ه¸®هٹ©ç”¨وˆ·وژŒوڈ،هچ•وœ؛و— ç©·ه¤§ç³»ç»ںçڑ„ه»؛و¨،ه’Œن»؟çœںو–¹و³•ï¼Œçگ†è§£و•…éڑœه¯¹ç³»ç»ں稳ه®ڑو€§çڑ„ه½±ه“چ,ه¹¶èƒ½ه¤ںé€ڑè؟‡ن»؟çœں结وœè¯„ن¼°ç³»ç»ںçڑ„و€§èƒ½م€‚ ه…¶ن»–说وکژï¼ڑو–‡ن¸وڈگهˆ°çڑ„ن¸€ن؛›ه…·ن½“و“چن½œه’Œè„ڑوœ¬ن»£ç په¯¹ن؛ژهˆه¦è€…و¥è¯´هڈ¯èƒ½ن¼ڑوœ‰ن¸€ه®ڑçڑ„éڑ¾ه؛¦ï¼Œه»؛议结هگˆه®کو–¹و–‡و،£وˆ–ه…¶ن»–و•™ç¨‹ن¸€èµ·ه¦ن¹ م€‚هگŒو—¶ï¼Œéƒ¨هˆ†وٹ€ه·§ه’Œç»ڈéھŒو¥è‡ھن؛ژن½œè€…çڑ„ه®é™…و“چن½œï¼Œه…·وœ‰ن¸€ه®ڑçڑ„ه®ç”¨و€§م€‚
KUKAوœ؛ه™¨ن؛؛相ه…³èµ„و–™
هں؛ن؛ژDLRو¨،ه‹çڑ„PM10–能è§په؛¦â€“و¹؟ه؛¦ç›¸ه…³و€§ ç ”ç©¶.pdf
ه†…ه®¹و¦‚è¦پï¼ڑوœ¬و–‡è¯¦ç»†ن»‹ç»چن؛†ه¦‚ن½•ن½؟用MATLAB/Simulinkè؟›è،Œه…‰ن¼ڈه¹¶ç½‘ç³»ç»ںçڑ„وœ€ه¤§هٹںçژ‡ç‚¹è·ںè¸ھ(MPPT)ن»؟çœں,é‡چ点讨è®؛ن؛†ç”µه¯¼ه¢é‡ڈو³•çڑ„ه؛”用م€‚首ه…ˆéکگè؟°ن؛†ç”µه¯¼ه¢é‡ڈو³•çڑ„هں؛وœ¬هژںçگ†ï¼Œوژ¥ç€ه±•ç¤؛ن؛†ه¦‚ن½•هœ¨Simulinkن¸و„ه»؛ه…‰ن¼ڈ电و± و¨،ه‹ه’ŒMPPTوژ§هˆ¶ç³»ç»ں,هŒ…و‹¬Boostهچ‡هژ‹ç”µè·¯çڑ„设è®،ه’ŒPIوژ§هˆ¶هڈ‚و•°çڑ„设ه®ڑم€‚éڑڈهگژ,é€ڑè؟‡ن»؟çœںهˆ†وگن؛†ن¸چهگŒه…‰ç…§ه¼؛ه؛¦ه’Œو¸©ه؛¦و،ن»¶ه¯¹ه…‰ن¼ڈç³»ç»ںو€§èƒ½çڑ„ه½±ه“چ,éھŒè¯پن؛†ç”µه¯¼ه¢é‡ڈو³•çڑ„وœ‰و•ˆو€§ï¼Œه¹¶وڈگه‡؛ن؛†é’ˆه¯¹ç‰¹ه®ڑه·¥ه†µçڑ„ن¼کهŒ–وژھو–½م€‚ 适هگˆن؛؛群ï¼ڑن»ژن؛‹ه…‰ن¼ڈç³»ç»ںç ”ç©¶ه’Œوٹ€وœ¯ه¼€هڈ‘çڑ„ن¸“ن¸ڑن؛؛ه£«ï¼Œه°¤ه…¶وک¯é‚£ن؛›ه¸Œوœ›é€ڑè؟‡ن»؟çœںه·¥ه…·و·±ه…¥çگ†è§£MPPTوژ§هˆ¶وœ؛هˆ¶çڑ„ن؛؛群م€‚ ن½؟用هœ؛و™¯هڈٹç›®و ‡ï¼ڑ适用ن؛ژ需è¦پ评ن¼°ه’Œن¼کهŒ–ه…‰ن¼ڈه¹¶ç½‘ç³»ç»ںو€§èƒ½çڑ„ç ”هڈ‘é،¹ç›®ï¼Œو—¨هœ¨وڈگé«کç³»ç»ںهœ¨هگ„ç§چçژ¯ه¢ƒو،ن»¶ن¸‹çڑ„وœ€ه¤§هٹںçژ‡ç‚¹è·ںè¸ھو•ˆçژ‡م€‚ ه…¶ن»–说وکژï¼ڑو–‡ن¸وڈگن¾›ن؛†è¯¦ç»†çڑ„ن»£ç پ片و®µه’Œن»؟çœں结وœه›¾è،¨ï¼Œه¸®هٹ©è¯»è€…و›´ه¥½هœ°çگ†è§£ه’Œه¤چçژ°ه®éھŒè؟‡ç¨‹م€‚و¤ه¤–,è؟کوڈگهˆ°ن؛†ن¸€ن؛›ه¸¸è§پçڑ„ن»؟çœںé™·éک±هڈٹ解ه†³و–¹و،ˆï¼Œه¦‚هڈکو¥é•؟و±‚解ه™¨çڑ„é—®é¢که’ŒPIهڈ‚و•°و•´ه®ڑوٹ€ه·§م€‚
KUKAوœ؛ه™¨ن؛؛相ه…³و–‡و،£
ه†…ه®¹و¦‚è¦پï¼ڑوœ¬و–‡è¯¦ç»†وژ¢è®¨ن؛†هڈŒé¦ˆé£ژهٹ›هڈ‘电وœ؛(DFIG)هœ¨Simulinkçژ¯ه¢ƒن¸‹çڑ„ه»؛و¨،و–¹و³•هڈٹه…¶هœ¨ن¸چهگŒé£ژé€ںو،ن»¶ن¸‹çڑ„电وµپن¸ژ电هژ‹و³¢ه½¢ç‰¹ه¾پم€‚首ه…ˆن»‹ç»چن؛†DFIGçڑ„هں؛وœ¬هژںçگ†ï¼Œهچ³ه®ڑهگç›´وژ¥وژ¥ه…¥ç”µç½‘,转هگé€ڑè؟‡هڈŒهگ‘هڈکوµپه™¨è؟وژ¥ç”µç½‘çڑ„特点م€‚وژ¥ç€éکگè؟°ن؛†Simulinkو¨،ه‹çڑ„ه…·ن½“وگه»؛و¥éھ¤ï¼ŒهŒ…و‹¬é£ژهٹ›وœ؛و¨،ه‹م€پن¼ هٹ¨ç³»ç»ںو¨،ه‹م€پDFIGوœ¬ن½“و¨،ه‹ه’Œهڈکوµپه™¨و¨،ه‹çڑ„ه»؛ç«‹م€‚و–‡ن¸ه¼؛è°ƒن؛†هڈکوµپه™¨وژ§هˆ¶ç®—و³•çڑ„é‡چè¦پو€§ï¼Œç‰¹هˆ«وک¯هœ¨ه؛”ه¯¹é£ژé€ںهڈکهŒ–و—¶ï¼Œé€ڑè؟‡ه®و—¶è°ƒو•´è½¬هگن¾§çڑ„电هژ‹ه’Œç”µوµپ,ç،®ن؟电وµپه’Œç”µهژ‹و³¢ه½¢çڑ„良ه¥½ç‰¹و€§م€‚و¤ه¤–,و–‡ç« è؟ک讨è®؛ن؛†و¨،ه‹ن¸çڑ„ه…³é”®وٹ€وœ¯ه’ŒوŒ‘وˆک,ه¦‚转هگ电وµپçژ¯وژ§هˆ¶ç–ç•¥م€پن½ژ电هژ‹ç©؟è¶ٹو€§èƒ½م€پç›´وµپو¯چç؛؟电هژ‹è„‰هٹ¨ç‰é—®é¢ک,ه¹¶وڈگن¾›ن؛†ه…·ن½“çڑ„解ه†³و–¹و،ˆه’Œوٹ€وœ¯ç»†èٹ‚م€‚وœ€ç»ˆï¼Œé€ڑè؟‡ه¯¹و•…éڑœه·¥ه†µçڑ„ن»؟çœںوµ‹è¯•ï¼ŒéھŒè¯پن؛†و‰€ه»؛و¨،ه‹çڑ„وœ‰و•ˆو€§ه’Œن¼کè¶ٹو€§م€‚ 适用ن؛؛群ï¼ڑن»ژن؛‹é£ژهٹ›هڈ‘ç”µç ”ç©¶çڑ„وٹ€وœ¯ن؛؛ه‘کم€پé«کو ،相ه…³ن¸“ن¸ڑه¸ˆç”ںم€په¯¹ç”µهٹ›ç”µهگوژ§هˆ¶ç³»ç»ںو„ںه…´è¶£çڑ„ه·¥ç¨‹وٹ€وœ¯ن؛؛ه‘کم€‚ ن½؟用هœ؛و™¯هڈٹç›®و ‡ï¼ڑ适用ن؛ژه¸Œوœ›و·±ه…¥ن؛†è§£DFIGه·¥ن½œهژںçگ†م€پوژŒوڈ،Simulinkه»؛و¨،وٹ€èƒ½çڑ„ç ”ç©¶ن؛؛ه‘کï¼›و—¨هœ¨ه¸®هٹ©è¯»è€…çگ†è§£DFIGهœ¨ن¸چهگŒé£ژé€ںو،ن»¶ن¸‹çڑ„هٹ¨و€په“چه؛”وœ؛هˆ¶ï¼Œن¸؛ن¼کهŒ–é£ژهٹ›هڈ‘电系ç»ںçڑ„وژ§هˆ¶ç–ç•¥وڈگن¾›çگ†è®؛ن¾وچ®ه’Œوٹ€وœ¯و”¯وŒپم€‚ ه…¶ن»–说وکژï¼ڑو–‡ç« ن¸چن»…وڈگن¾›ن؛†è¯¦ç»†çڑ„çگ†è®؛解é‡ٹ,è؟ک附وœ‰ه¤§é‡ڈMatlab/Simulinkن»£ç پ片و®µï¼Œن¾؟ن؛ژ读者è؟›è،Œه®è·µو“چن½œم€‚هگŒو—¶ï¼Œé’ˆه¯¹ن¸€ن؛›ه¸¸è§پé—®é¢کç»™ه‡؛ن؛†ه®ç”¨çڑ„调试وٹ€ه·§ï¼Œوœ‰هٹ©ن؛ژوڈگé«کن»؟çœںçڑ„ه‡†ç،®و€§ه’Œهڈ¯é و€§م€‚
linuxن¹‹ç”¨وˆ·ç®،çگ†و•™ç¨‹.md
ه†…ه®¹و¦‚è¦پï¼ڑوœ¬و–‡è¯¦ç»†ن»‹ç»چن؛†هˆ©ç”¨ن¸‰èڈ±PLC(特هˆ«وک¯FXç³»هˆ—)ه’Œç»„و€پçژ‹è½¯ن»¶و„ه»؛3x3ن¹¦و¶ه¼ڈه †ه›ه¼ڈç«‹ن½“ه؛“çڑ„و–¹و³•م€‚首ه…ˆéکگè؟°ن؛†IOهˆ†é…چçڑ„هژںهˆ™ï¼Œوکژç،®ن؛†è¾“ه…¥è¾“ه‡؛ن؟،هڈ·çڑ„هٹں能,ه¦‚ن»“ن½چو£€وµ‹م€په †ه›وœ؛è؟گهٹ¨وژ§هˆ¶ç‰م€‚وژ¥ç€و·±ه…¥è§£وگن؛†و¢¯ه½¢ه›¾ç¼–程çڑ„ه…·ن½“ه®çژ°ï¼ŒهŒ…و‹¬هں؛وœ¬çڑ„ه·¦هڈ³ç§»هٹ¨وژ§هˆ¶م€په¤چو‚çڑ„è‡ھهٹ¨ه¯»ه€é€»è¾‘,ن»¥هڈٹç،®ن؟ه®‰ه…¨و€§çڑ„é™گن½چن؟وٹ¤وژھو–½م€‚è؟که±•ç¤؛ن؛†وژ¥ç؛؟ه›¾ه’Œهژںçگ†ه›¾çڑ„ن½œç”¨ï¼Œه¼؛è°ƒن؛†و£ç،®çڑ„电و°”è؟وژ¥و–¹ه¼ڈم€‚وœ€هگژ讲解ن؛†ç»„و€پçژ‹çڑ„ç”»é¢è®¾è®،وٹ€ه·§ï¼Œé€ڑè؟‡ه›¾ه½¢هŒ–ç•Œé¢ه®çژ°ه¯¹ç«‹ن½“ه؛“çڑ„و“چن½œه’Œç›‘وژ§م€‚ 适用ن؛؛群ï¼ڑن»ژن؛‹è‡ھهٹ¨هŒ–ن»“ه‚¨ç³»ç»ں设è®،م€په®‰è£…م€پ调试çڑ„وٹ€وœ¯ن؛؛ه‘ک,ه°¤ه…¶وک¯ç†ںو‚‰ن¸‰èڈ±PLCه’Œç»„و€پçژ‹çڑ„ه·¥ç¨‹ه¸ˆم€‚ ن½؟用هœ؛و™¯هڈٹç›®و ‡ï¼ڑ适用ن؛ژ需è¦پوڈگé«کن»“ه؛“ç©؛é—´هˆ©ç”¨çژ‡çڑ„ه°ڈه‹ن»“ه‚¨çژ¯ه¢ƒï¼Œو—¨هœ¨ه¸®هٹ©وٹ€وœ¯ن؛؛ه‘کوژŒوڈ،ن»ژç،¬ن»¶é€‰ه‹م€پ电路设è®،هˆ°è½¯ن»¶ç¼–程çڑ„ه…¨وµپ程وٹ€èƒ½ï¼Œوœ€ç»ˆه®çژ°é«کو•ˆç¨³ه®ڑçڑ„è‡ھهٹ¨هŒ–ن»“ه‚¨ç®،çگ†م€‚ ه…¶ن»–说وکژï¼ڑو–‡ن¸وڈگن¾›ن؛†ه¤ڑن¸ھه®ç”¨çڑ„编程وٹ€ه·§ه’Œو³¨و„ڈن؛‹é،¹ï¼Œه¦‚éپ؟ه…چه¸¸è§پ错误م€پن¼کهŒ–و€§èƒ½هڈ‚و•°ç‰ï¼Œوœ‰هٹ©ن؛ژه‡ڈه°‘ه®é™…ه؛”用ن¸çڑ„و•…éڑœçژ‡ه¹¶وڈگهچ‡ç³»ç»ںçڑ„هڈ¯é و€§م€‚
هں؛ن؛ژSTM32çڑ„ه¾ھè؟¹éپ؟éڑœه°ڈ车 ن¸»وژ§ï¼ڑSTM32 وک¾ç¤؛ï¼ڑOLED 电و؛گو¨،ه— 舵وœ؛ن؛‘هڈ° 超ه£°و³¢وµ‹è· ç؛¢ه¤–ه¾ھè؟¹و¨،ه—(3ن¸ھ,ه·¦ن¸هڈ³ï¼‰ è“牙و¨،ه— وŒ‰é”®ï¼ˆ6ن¸ھ,و¨،ه¼ڈه’Œو‰‹هٹ¨وژ§هˆ¶ه°ڈ车çٹ¶و€پ) TB6612驱هٹ¨çڑ„هڈŒç”µوœ؛ هٹں能ï¼ڑ 该ه°ڈ车ه…±وœ‰3ç§چو¨،ه¼ڈï¼ڑ è‡ھهٹ¨و¨،ه¼ڈï¼ڑو ¹وچ®ç؛¢ه¤–ه¾ھè؟¹ه’Œè¶…ه£°و³¢وµ‹è·و¨،ه—ه†³ه®ڑه°ڈ车çڑ„çٹ¶و€پ و‰‹هٹ¨و¨،ه¼ڈï¼ڑو ¹وچ®وŒ‰é”®çڑ„çٹ¶و€پو¥ه†³ه®ڑه°ڈ车çڑ„çٹ¶و€پ è“牙و¨،ه¼ڈï¼ڑو ¹وچ®è“牙وŒ‡ن»¤و¥ه†³ه®ڑه°ڈ车çڑ„çٹ¶و€پ è‡ھهٹ¨و¨،ه¼ڈï¼ڑ è‡ھهٹ¨و¨،ه¼ڈن¸‹ï¼Œو£€وµ‹è·ç¦»ن½ژن؛ژ5cmه°ڈ车هگژ退 وœھو£€وµ‹هˆ°ن»»ن½•é»‘ç؛؟,ه°ڈ车هپœو¢ و£€وµ‹هˆ°ه·¦è¾¹وˆ–ه·¦è¾¹+ن¸é—´é»‘ç؛؟,ه°ڈ车ه·¦è½¬ و£€وµ‹هˆ°هڈ³è¾¹وˆ–هڈ³è¾¹+ن¸é—´é»‘ç؛؟,ه°ڈ车هڈ³è½¬ و£€وµ‹هˆ°ن¸è¾¹وˆ–ه·¦è¾¹+ن¸é—´+هڈ³è¾¹é»‘ç؛؟,ه°ڈ车ه‰چè؟› و‰‹هٹ¨و¨،ه¼ڈï¼ڑو ¹وچ®وŒ‰é”®çڑ„çٹ¶و€پو¥ه†³ه®ڑه°ڈ车çڑ„çٹ¶و€پ è“牙و¨،ه¼ڈï¼ڑ //需هˆ‡وچ¢ن¸؛è“牙و¨،ه¼ڈو‰چ能وŒ‡ن»¤وژ§هˆ¶ *StatusX Xهڈ–ه€¼ن¸؛0-4 0ï¼ڑه°ڈ车هپœو¢ 1ï¼ڑه°ڈ车ه‰چè؟› 2ï¼ڑه°ڈ车هگژ退 3ï¼ڑه°ڈ车ه·¦è½¬ 4ï¼ڑه°ڈ车هڈ³è½¬
çں¢é‡ڈ边界,è،Œو”؟هŒ؛هںں边界,精ç،®هˆ°ن¹،镇è،—éپ“,هڈ¯ç›´وژ¥ه¯¼ه…¥arcgisن½؟用
ه†…ه®¹و¦‚è¦پï¼ڑوœ¬و–‡وژ¢è®¨ن؛†هں؛ن؛ژIEEE33èٹ‚点çڑ„ن¸»هٹ¨é…چ电网ن¼کهŒ–و–¹و³•ï¼Œو—¨هœ¨é€ڑè؟‡هگˆçگ†çڑ„è°ƒه؛¦و¨،ه‹é™چن½ژé…چ电网çڑ„و€»è؟گè،Œوˆگوœ¬م€‚و–‡ن¸è¯¦ç»†ن»‹ç»چن؛†و¨،ه‹çڑ„و„ه»؛,هŒ…و‹¬é£ژه…‰هڈ‘电م€په‚¨èƒ½è£…ç½®م€پوں´و²¹هڈ‘电وœ؛ه’Œç‡ƒو°”è½®وœ؛ç‰ه¤ڑç§چهˆ†ه¸ƒه¼ڈ电و؛گçڑ„集وˆگم€‚ن¸؛ن؛†ه®çژ°è؟™ن¸€ç›®و ‡ï¼Œن½œè€…وڈگه‡؛ن؛†ه…·ن½“çڑ„ç؛¦وںو،ن»¶ï¼Œه¦‚ه‚¨èƒ½ه……و”¾ç”µهٹںçژ‡é™گهˆ¶ه’Œو½®وµپç؛¦وں,ه¹¶é‡‡ç”¨ن؛†ç²’هگ群算و³•è؟›è،Œو±‚解م€‚é€ڑè؟‡ن¸€ç³»هˆ—ه®éھŒéھŒè¯پ,وœ€ç»ˆه¾—هˆ°ن؛†ن¼کهŒ–çڑ„هˆ†ه¸ƒه¼ڈ电و؛گè؟گè،Œè®،هˆ’,وک¾è‘—é™چن½ژن؛†و€»وˆگوœ¬ه¹¶وڈگé«کن؛†ç³»ç»ںçڑ„稳ه®ڑو€§م€‚ 适هگˆن؛؛群ï¼ڑن»ژن؛‹ç”µهٹ›ç³»ç»ںن¼کهŒ–م€پو™؛èƒ½ç”µç½‘ç ”ç©¶çڑ„ن¸“ن¸ڑن؛؛ه£«ه’Œوٹ€وœ¯çˆ±ه¥½è€…م€‚ ن½؟用هœ؛و™¯هڈٹç›®و ‡ï¼ڑ适用ن؛ژ需è¦پن¼کهŒ–é…چ电网è؟گè،Œوˆگوœ¬çڑ„ç ”ç©¶وœ؛و„ه’Œن¼پن¸ڑم€‚ن¸»è¦پç›®و ‡وک¯هœ¨و»،足هگ„ç§چç؛¦وںو،ن»¶ن¸‹ï¼Œé€ڑè؟‡هگˆçگ†çڑ„è°ƒه؛¦ç–ç•¥ن½؟é…چ电网و›´هٹ ç»ڈوµژé«کو•ˆهœ°è؟گè،Œم€‚ ه…¶ن»–说وکژï¼ڑو–‡ç« ن¸چن»…وڈگن¾›ن؛†è¯¦ç»†çڑ„çگ†è®؛وژ¨ه¯¼ه’Œç®—و³•ه®çژ°ï¼Œè؟کهˆ†ن؛«ن؛†è®¸ه¤ڑه®ç”¨çڑ„ç»ڈéھŒوٹ€ه·§ï¼Œه¦‚ه‚¨èƒ½ه……و”¾ç”µç–ç•¥م€پç²’هگ群算و³•هڈ‚و•°é€‰و‹©ç‰م€‚و¤ه¤–,é€ڑè؟‡ه…·ن½“و،ˆن¾‹ه±•ç¤؛ن؛†ن¸چهگŒç”µو؛گن¹‹é—´çڑ„هچڈهگŒن½œç”¨هڈٹه…¶ç»ڈوµژو•ˆç›ٹم€‚
KUKAوœ؛ه™¨ن؛؛相ه…³و–‡و،£
ه†…ه®¹و¦‚è¦پï¼ڑوœ¬و–‡è¯¦ç»†ن»‹ç»چن؛†ه°†ه…‰çƒç”µç«™(CSP)ه’Œوœ‰وœ؛وœ—肯ه¾ھçژ¯(ORC)集وˆگهˆ°ç»¼هگˆèƒ½و؛گç³»ç»ںن¸çڑ„ن¼کهŒ–ه»؛و¨،و–¹و³•م€‚ن¸»è¦په†…ه®¹و¶µç›–ç³»ç»ںçڑ„ç›®و ‡ه‡½و•°è®¾è®،م€په…³é”®è®¾ه¤‡çڑ„ç؛¦وںو،ن»¶ï¼ˆه¦‚CSPه‚¨çƒç½گم€پORCçƒç”µè€¦هگˆï¼‰م€پن»¥هڈٹه…·ن½“ه®çژ°çڑ„وٹ€وœ¯ç»†èٹ‚م€‚و–‡ن¸é€ڑè؟‡MATLABه’ŒYALMIPه·¥ه…·è؟›è،Œه»؛و¨،,采用CPLEXو±‚解ه™¨è§£ه†³و··هگˆو•´و•°è§„هˆ’é—®é¢ک,ç،®ن؟ç³»ç»ںهœ¨ç»ڈوµژو€§ه’Œçژ¯ه¢ƒو•ˆç›ٹو–¹é¢çڑ„وœ€ن¼کè،¨çژ°م€‚و¤ه¤–,و–‡ç« è؟ک讨è®؛ن؛†ç¢³وژ’و”¾وƒ©ç½ڑوœ؛هˆ¶م€پé£ژه…‰ه¼ƒèƒ½ه¤„çگ†ç‰ه®é™…ه؛”用هœ؛و™¯ن¸çڑ„وŒ‘وˆکهڈٹه…¶è§£ه†³و–¹و،ˆم€‚ 适هگˆن؛؛群ï¼ڑن»ژن؛‹ç»¼هگˆèƒ½و؛گç³»ç»ںç ”ç©¶çڑ„ن¸“ن¸ڑن؛؛ه£«ï¼Œه°¤ه…¶وک¯ه¯¹ه…‰çƒهڈ‘电م€پن½™çƒهˆ©ç”¨و„ںه…´è¶£çڑ„ç§‘ç ”ه·¥ن½œè€…ه’Œوٹ€وœ¯ه¼€هڈ‘者م€‚ ن½؟用هœ؛و™¯هڈٹç›®و ‡ï¼ڑ适用ن؛ژ需è¦پ评ن¼°ه’Œن¼کهŒ–هŒ…هگ«ه¤ڑç§چ能و؛گه½¢ه¼ڈ(ه¦‚ه…‰ن¼ڈم€پé£ژ电م€پ燃و°”锅炉ç‰ï¼‰هœ¨ه†…çڑ„ه¤چو‚能و؛گç³»ç»ںçڑ„é،¹ç›®م€‚ç›®و ‡وک¯هœ¨و»،足ن¾›ç”µن¾›çƒéœ€و±‚çڑ„هگŒو—¶ï¼Œوœ€ه°ڈهŒ–è؟گè،Œوˆگوœ¬ه¹¶ه‡ڈه°‘碳وژ’و”¾م€‚ ه…¶ن»–说وکژï¼ڑو–‡ن¸وڈگن¾›ن؛†ه¤§é‡ڈه…·ن½“çڑ„MATLABن»£ç پ片و®µن½œن¸؛ه®ن¾‹ï¼Œه¸®هٹ©è¯»è€…و›´ه¥½هœ°çگ†è§£ه’Œه¤چçژ°و‰€وڈگه‡؛çڑ„ن¼کهŒ–و¨،ه‹م€‚ه¯¹ن؛ژهˆه¦è€…而言,ه»؛è®®ن»ژ简هچ•çڑ„ç،®ه®ڑو€§و¨،ه‹ه…¥و‰‹ï¼Œé€گو¸گè؟‡و¸،هˆ°و›´ه¤چو‚çڑ„éڑڈوœ؛规هˆ’ه’Œé²پو£’ن¼کهŒ–م€‚
网站设è®،ن¸ژç®،çگ†ن½œن¸ڑن¸€.ppt
ه†…ه®¹و¦‚è¦پï¼ڑوœ¬و–‡è¯¦ç»†ن»‹ç»چن؛†ه¦‚ن½•ن½؟用MATLABوگه»؛هڈŒé—çژ¯Buck电路çڑ„ن»؟çœںو¨،ه‹م€‚首ه…ˆه®ڑن¹‰ن؛†ن¸»ç”µè·¯çڑ„ه…³é”®هڈ‚و•°ï¼Œه¦‚输ه…¥ç”µهژ‹م€پ电و„ںم€پ电ه®¹ç‰ï¼Œه¹¶è§£é‡ٹن؛†è؟™ن؛›هڈ‚و•°çڑ„选و‹©ن¾وچ®م€‚وژ¥ç€هˆ†هˆ«ه¯¹ç”µهژ‹ه¤–çژ¯ه’Œç”µوµپه†…çژ¯è؟›è،Œن؛†PIوژ§هˆ¶ه™¨çڑ„设è®،,ه¼؛è°ƒن؛†ç”µوµپçژ¯ه“چه؛”é€ںه؛¦éœ€è¦پوک¾è‘—é«کن؛ژ电هژ‹çژ¯ن»¥ç،®ن؟ç³»ç»ںçڑ„稳ه®ڑو€§م€‚و–‡ن¸è؟ک讨è®؛ن؛†ن»؟çœںè؟‡ç¨‹ن¸çڑ„ن¸€ن؛›ه…³é”®وٹ€وœ¯ç»†èٹ‚,ه¦‚PWMو»هŒ؛و—¶é—´çڑ„设置م€پن½ژé€ڑو»¤و³¢ه™¨çڑ„ه؛”用ن»¥هڈٹهڈ‚و•°è°ƒو•´çڑ„و–¹و³•م€‚é€ڑè؟‡ه¯¹و¯”هچ•é—çژ¯ه’ŒهڈŒé—çژ¯ç³»ç»ںçڑ„و€§èƒ½ï¼Œه±•ç¤؛ن؛†هڈŒé—çژ¯و–¹و،ˆهœ¨ه؛”ه¯¹è´ںè½½çھپهڈکو—¶çڑ„ن¼کهٹ؟م€‚وœ€هگژهˆ†ن؛«ن؛†ن¸€ن؛›è°ƒè¯•ç»ڈéھŒه’Œه¸¸è§پé—®é¢کçڑ„解ه†³و–¹و،ˆم€‚ 适هگˆن؛؛群ï¼ڑن»ژن؛‹ç”µهٹ›ç”µهگم€پ电و؛گ设è®،领هںںçڑ„ه·¥ç¨‹ه¸ˆه’Œوٹ€وœ¯ن؛؛ه‘ک,ه°¤ه…¶وک¯وœ‰ن¸€ه®ڑMATLABهں؛ç،€çڑ„读者م€‚ ن½؟用هœ؛و™¯هڈٹç›®و ‡ï¼ڑ适用ن؛ژ需è¦پè؟›è،Œç”µو؛گç®،çگ†èٹ¯ç‰‡è®¾è®،éھŒè¯پم€پ电و؛گç³»ç»ںو€§èƒ½è¯„ن¼°çڑ„ç ”ç©¶ن؛؛ه‘که’Œه·¥ç¨‹ه¸ˆم€‚ن¸»è¦پç›®و ‡وک¯وڈگé«ک电و؛گç³»ç»ںçڑ„稳ه®ڑو€§ه’Œه“چه؛”é€ںه؛¦ï¼Œç‰¹هˆ«وک¯هœ¨è´ںè½½هڈکهŒ–ه‰§çƒˆçڑ„وƒ…ه†µن¸‹م€‚ ه…¶ن»–说وکژï¼ڑو–‡ç« ن¸چن»…وڈگن¾›ن؛†è¯¦ç»†çڑ„çگ†è®؛هˆ†وگ,è؟کهŒ…و‹¬ن؛†ه¤§é‡ڈçڑ„ن»£ç پ片و®µه’Œه…·ن½“çڑ„调试و¥éھ¤ï¼Œه¸®هٹ©è¯»è€…و›´ه¥½هœ°çگ†è§£ه’Œه؛”用و‰€ه¦çں¥è¯†م€‚هگŒو—¶وڈگ醒读者و³¨و„ڈن»؟çœںن¸ژه®é™…وƒ…ه†µن¹‹é—´çڑ„ه·®ه¼‚,鼓هٹ±هœ¨ه®è·µن¸ن¸چو–وژ¢ç´¢ه’Œو”¹è؟›م€‚