虽然A*(读ن½œAوکں)算و³•ه¯¹هˆه¦è€…و¥è¯´وک¯و¯”较و·±ه¥¥éڑ¾و‡‚,ن½†وک¯ن¸€و—¦ن½ و‰¾هˆ°é—¨è·¯ن؛†ï¼Œه®ƒهڈˆن¼ڑهڈکه¾—éه¸¸ç®€هچ•م€‚网ن¸ٹوœ‰ه¾ˆه¤ڑ解é‡ٹA*ç®—و³•çڑ„و–‡ç« ,ن½†وک¯ه¤§ه¤ڑو•°وک¯ه†™ç»™é‚£ن؛›وœ‰ن¸€ه®ڑهں؛ç،€çڑ„ن؛؛看çڑ„,而و‚¨çœ‹هˆ°çڑ„è؟™ن¸€ç¯‡ه‘¢ï¼Œوک¯çœںو£ه†™ç»™èڈœé¸ںçڑ„م€‚
وœ¬ç¯‡و–‡ç« ه¹¶ن¸چوƒ³ç»™è؟™ن¸ھç®—و³•é¢کç›®ن½œن¸€ن؛›وƒه¨پو€§è®؛و–,而وک¯éکگè؟°ه®ƒçڑ„هں؛وœ¬هژںçگ†ï¼Œه¹¶ن¸؛ن½ çگ†è§£و›´ه¤ڑ相ه…³èµ„و–™ن¸ژ讨è®؛و‰“ن¸‹هں؛ç،€م€‚و–‡ç« وœ«ه°¾ç»™ه‡؛ن؛†ن¸€ن؛›و¯”较ه¥½çڑ„链وژ¥ï¼Œو”¾هœ¨â€œè؟›éک¶éک…读â€ن¸€èٹ‚ن¹‹هگژم€‚
وœ€هگژ,وœ¬و–‡ن¸چوک¯ç¼–程规范,ن½ ه°†هڈ¯èƒ½ن½؟è؟™é‡Œè®²è؟°çڑ„ن¸œè¥؟ç¼–ه†™وˆگن»»ن½•è®،ç®—وœ؛è¯è¨€م€‚هœ¨وœ¬و–‡çڑ„وœ«ه°¾وˆ‘è؟کç»™ه‡؛ن؛†ن¸€ن¸ھن¾‹هگ程ه؛ڈهŒ…çڑ„ن¸‹è½½é“¾وژ¥ï¼Œن¹ں许و£هگˆن½ و„ڈم€‚هœ¨è؟™ن¸ھهŒ…ن¸وœ‰C++ه’ŒBlitz Basicن¸¤ن¸ھ版وœ¬çڑ„程ه؛ڈن»£ç پ,ه¦‚وœن½ هڈھوک¯وƒ³çœ‹çœ‹A*ç®—و³•وک¯ه¦‚ن½•è؟گن½œçڑ„,该هŒ…ن¸ن¹ںوœ‰هڈ¯ç›´وژ¥و‰§è،Œçڑ„و–‡ن»¶ن¾›ن½ ç ”ç©¶م€‚
وˆ‘ن»¬è؟کوک¯è¦پ超è¶ٹè‡ھه·±çڑ„(وٹٹç®—و³•ه¼„و‡‚),و‰€ن»¥ï¼Œè®©وˆ‘ن»¬ن»ژه¤´ه¼€ه§‹هگ§ï¼پ
م€€
هˆو¥ï¼ڑوگœç´¢هŒ؛هںں
وˆ‘ن»¬هپ‡è®¾وںگن¸ھن؛؛è¦پن»ژA点هˆ°è¾¾B点,而ن¸€ه µه¢™وٹٹè؟™ن¸¤ن¸ھ点éڑ”ه¼€ن؛†ï¼Œه¦‚ن¸‹ه›¾و‰€ç¤؛,ç»؟色部هˆ†ن»£è،¨èµ·ç‚¹A,ç؛¢è‰²éƒ¨هˆ†ن»£è،¨ç»ˆç‚¹B,è“色و–¹ه—部هˆ†ن»£è،¨ن¹‹é—´çڑ„ه¢™م€‚
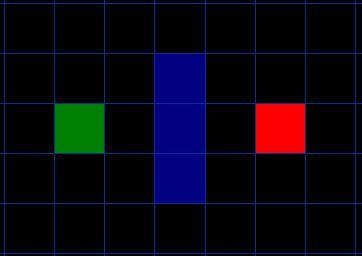
[ه›¾ن¸€]
ن½ 首ه…ˆن¼ڑو³¨و„ڈهˆ°وˆ‘ن»¬وٹٹè؟™ن¸€ه—وگœç´¢هŒ؛هںںهˆ†وˆگن؛†ن¸€ن¸ھن¸€ن¸ھçڑ„و–¹و ¼ï¼Œه¦‚و¤è؟™èˆ¬ï¼Œن½؟وگœç´¢هŒ؛هںں简هچ•هŒ–,و£وک¯ه¯»و‰¾è·¯ه¾„çڑ„第ن¸€و¥م€‚è؟™ç§چو–¹و³•ه°†وˆ‘ن»¬çڑ„وگœç´¢هŒ؛هںں简هŒ–وˆگن؛†ن¸€ن¸ھو™®é€ڑçڑ„ن؛Œç»´و•°ç»„م€‚و•°ç»„ن¸çڑ„و¯ڈن¸€ن¸ھه…ƒç´ è،¨ç¤؛ه¯¹ه؛”çڑ„ن¸€ن¸ھو–¹و ¼ï¼Œè¯¥و–¹و ¼çڑ„çٹ¶و€پ被و ‡è®°ن¸؛هڈ¯é€ڑè؟‡çڑ„ه’Œن¸چهڈ¯é€ڑè؟‡çڑ„م€‚é€ڑè؟‡و‰¾ه‡؛ن»ژA点هˆ°B点و‰€ç»ڈè؟‡çڑ„و–¹و ¼ï¼Œه°±èƒ½ه¾—هˆ°ABن¹‹é—´çڑ„è·¯ه¾„م€‚ه½“è·¯ه¾„و‰¾ه‡؛و¥ن»¥هگژ,è؟™ن¸ھن؛؛ه°±هڈ¯ن»¥ن»ژن¸€ن¸ھو ¼هگن¸ه¤®ç§»هٹ¨هˆ°هڈ¦ن¸€ن¸ھو ¼هگن¸ه¤®ï¼Œç›´هˆ°وٹµè¾¾ç›®çڑ„هœ°م€‚
è؟™ن؛›و ¼هگçڑ„ن¸ç‚¹هڈ«هپڑèٹ‚点م€‚ه½“ن½ هœ¨ه…¶ن»–هœ°و–¹çœ‹هˆ°وœ‰ه…³ه¯»و‰¾è·¯ه¾„çڑ„ن¸œè¥؟و—¶ï¼Œن½ ن¼ڑç»ڈه¸¸هڈ‘çژ°ن؛؛ن»¬هœ¨è®¨è®؛èٹ‚点م€‚ن¸؛ن»€ن¹ˆن¸چç›´وژ¥وٹٹه®ƒن»¬ç§°ن½œو–¹و ¼ه‘¢ï¼ںه› ن¸؛ن½ ن¸چن¸€ه®ڑè¦پوٹٹن½ çڑ„وگœç´¢هŒ؛هںںهˆ†éڑ”وˆگو–¹ه—,çں©ه½¢م€په…è¾¹ه½¢وˆ–者ه…¶ن»–ن»»ن½•ه½¢çٹ¶éƒ½هڈ¯ن»¥م€‚ه†µن¸”èٹ‚点è؟کوœ‰هڈ¯èƒ½ن½چن؛ژè؟™ن؛›ه½¢çٹ¶ه†…çڑ„ن»»ن½•ن¸€ه¤„ه‘¢ï¼ںهœ¨ن¸é—´م€پé ç€è¾¹ï¼Œوˆ–者ن»€ن¹ˆçڑ„م€‚وˆ‘ن»¬ه°±ç”¨è؟™ç§چ设ه®ڑ,ه› ن¸؛و¯•ç«ںè؟™وک¯وœ€ç®€هچ•çڑ„وƒ…ه†µم€‚
ه¼€ه§‹وگœç´¢
ه½“وˆ‘ن»¬وٹٹوگœç´¢هŒ؛هںں简هŒ–وˆگن¸€ن؛›ه¾ˆه®¹وک“و“چن½œçڑ„èٹ‚点هگژ,ن¸‹ن¸€و¥ه°±è¦پو„é€ ن¸€ن¸ھوگœç´¢و¥ه¯»و‰¾وœ€çںè·¯ه¾„م€‚هœ¨A*ç®—و³•ن¸ï¼Œوˆ‘ن»¬ن»ژA点ه¼€ه§‹ï¼Œن¾و¬،و£€وں¥ه®ƒçڑ„相邻èٹ‚点,然هگژç…§و¤ç»§ç»ه¹¶هگ‘ه¤–و‰©ه±•ç›´هˆ°و‰¾هˆ°ç›®çڑ„هœ°م€‚
وˆ‘ن»¬é€ڑè؟‡ن»¥ن¸‹و–¹و³•و¥ه¼€ه§‹وگœç´¢ï¼ڑ
1.
ن»ژA点ه¼€ه§‹ï¼Œه°†A点هٹ ه…¥ن¸€ن¸ھن¸“é—¨هکو”¾ه¾…و£€éھŒçڑ„و–¹و ¼çڑ„“ه¼€و”¾هˆ—è،¨â€ن¸م€‚è؟™ن¸ھه¼€و”¾هˆ—è،¨وœ‰ç‚¹هƒڈن¸€ه¼ è´ç‰©و¸…هچ•م€‚ه½“ه‰چè؟™ن¸ھهˆ—è،¨ن¸هڈھوœ‰ن¸€ن¸ھه…ƒç´ ,ن½†ن¸€ن¼ڑه„؟ه°†ن¼ڑوœ‰و›´ه¤ڑم€‚هˆ—è،¨ن¸هŒ…هگ«çڑ„و–¹و ¼هڈ¯èƒ½ن¼ڑوک¯ن½ è¦پ途ç»ڈçڑ„و–¹و ¼ï¼Œن¹ںهڈ¯èƒ½ن¸چوک¯م€‚و€»ن¹‹ï¼Œè؟™وک¯ن¸€ن¸ھهŒ…هگ«ه¾…و£€éھŒو–¹و ¼çڑ„هˆ—è،¨م€‚
2.
و£€وں¥èµ·ç‚¹A相邻çڑ„و‰€وœ‰هڈ¯è¾¾çڑ„وˆ–者هڈ¯é€ڑè؟‡çڑ„و–¹و ¼ï¼Œن¸چ用ç®،ه¢™ه•ٹ,و°´ه•ٹ,وˆ–者ه…¶ن»–ن»€ن¹ˆو— و•ˆهœ°ه½¢ï¼Œوٹٹه®ƒن»¬ن¹ں都هٹ هˆ°ه¼€و”¾هˆ—è،¨ن¸م€‚ه¯¹ن؛ژو¯ڈن¸€ن¸ھ相邻و–¹و ¼ï¼Œه°†ç‚¹Aن؟هکن¸؛ه®ƒن»¬çڑ„“父و–¹و ¼â€م€‚ه½“وˆ‘ن»¬è¦په›و؛¯è·¯ه¾„çڑ„و—¶ه€™ï¼Œçˆ¶و–¹و ¼وک¯ن¸€ن¸ھه¾ˆé‡چè¦پçڑ„ه…ƒç´ م€‚ç¨چهگژوˆ‘ن»¬ه°†è¯¦ç»†è§£é‡ٹه®ƒم€‚
3.
ن»ژه¼€و”¾هˆ—è،¨ن¸هژ»وژ‰و–¹و ¼A,ه¹¶وٹٹAهٹ ه…¥هˆ°ن¸€ن¸ھ“ه°پé—هˆ—è،¨â€ن¸م€‚ه°پé—هˆ—è،¨هکو”¾çڑ„وک¯ن½ çژ°هœ¨ن¸چ用ه†چهژ»è€ƒè™‘çڑ„و–¹و ¼م€‚
و¤و—¶ن½ ه°†ه¾—هˆ°ه¦‚ن¸‹ه›¾و‰€ç¤؛çڑ„و ·هگم€‚هœ¨è؟™ه¼ ه›¾ن¸ï¼Œن¸é—´و·±ç»؟色çڑ„و–¹و ¼وک¯ن½ çڑ„èµ·ه§‹و–¹و ¼ï¼Œو‰€وœ‰ç›¸é‚»و–¹و ¼ç›®ه‰چ都هœ¨ه¼€و”¾هˆ—è،¨ن¸ï¼Œه¹¶ن¸”ن»¥ن؛®ç»؟色وڈڈè¾¹م€‚و¯ڈن¸ھ相邻و–¹و ¼وœ‰ن¸€ن¸ھçپ°è‰²çڑ„وŒ‡é’ˆوŒ‡هگ‘ه®ƒن»¬çڑ„父و–¹و ¼ï¼Œهچ³èµ·ه§‹و–¹و ¼م€‚

[ه›¾ن؛Œ]
م€€
وژ¥ن¸‹و¥ï¼Œوˆ‘ن»¬هœ¨ه¼€و”¾هˆ—è،¨ن¸é€‰ن¸€ن¸ھ相邻و–¹و ¼ه¹¶ه†چé‡چه¤چه‡ و¬،ه¦‚ه‰چو‰€è؟°çڑ„è؟‡ç¨‹م€‚ن½†وک¯وˆ‘ن»¬è¯¥é€‰ه“ھن¸€ن¸ھو–¹و ¼ه‘¢ï¼ںه…·وœ‰وœ€ه°ڈFه€¼çڑ„é‚£ن¸ھم€‚
è·¯ه¾„وژ’ه؛ڈ
ه†³ه®ڑه“ھن؛›و–¹و ¼ن¼ڑه½¢وˆگè·¯ه¾„çڑ„ه…³é”®وک¯ن¸‹é¢è؟™ن¸ھç‰ه¼ڈï¼ڑ
F = G + H
è؟™é‡Œ
-
Gï¼ن»ژ起点Aو²؟ç€ه·²ç”ںوˆگçڑ„è·¯ه¾„هˆ°ن¸€ن¸ھç»™ه®ڑو–¹و ¼çڑ„移هٹ¨ه¼€é”€م€‚
Hï¼ن»ژç»™ه®ڑو–¹و ¼هˆ°ç›®çڑ„و–¹و ¼çڑ„ن¼°è®،移هٹ¨ه¼€é”€م€‚è؟™ç§چو–¹ه¼ڈه¸¸هڈ«هپڑ试وژ¢ï¼Œوœ‰ç‚¹ه›°وƒ‘ن؛؛هگ§م€‚ه…¶ه®ن¹‹و‰€ن»¥هڈ«هپڑ试وژ¢و³•وک¯ه› ن¸؛è؟™هڈھوک¯ن¸€ن¸ھ猜وµ‹م€‚هœ¨و‰¾هˆ°è·¯ه¾„ن¹‹ه‰چوˆ‘ن»¬ه®é™…ن¸ٹه¹¶ن¸چçں¥éپ“ه®é™…çڑ„è·ç¦»ï¼Œه› ن¸؛ن»»ن½•ن¸œè¥؟都وœ‰هڈ¯èƒ½ه‡؛çژ°هœ¨هچٹè·¯ن¸ٹ(ه¢™ه•ٹ,و°´ه•ٹن»€ن¹ˆçڑ„)م€‚وœ¬و–‡ن¸ç»™ه‡؛ن؛†ن¸€ç§چè®،ç®—Hه€¼çڑ„و–¹و³•ï¼Œç½‘ن¸ٹè؟کوœ‰ه¾ˆه¤ڑه…¶ن»–و–‡ç« ن»‹ç»چçڑ„ن¸چهگŒو–¹و³•م€‚
وˆ‘ن»¬è¦پçڑ„è·¯ه¾„وک¯é€ڑè؟‡هڈچه¤چéپچهژ†ه¼€و”¾هˆ—è،¨ه¹¶é€‰و‹©ه…·وœ‰وœ€ه°ڈFه€¼çڑ„و–¹و ¼و¥ç”ںوˆگçڑ„م€‚وœ¬و–‡ç¨چهگژه°†è¯¦ç»†è®¨è®؛è؟™ن¸ھè؟‡ç¨‹م€‚وˆ‘ن»¬ه…ˆè؟›ن¸€و¥çœ‹çœ‹ه¦‚ن½•è®،ç®—é‚£ن¸ھç‰ه¼ڈم€‚
ه¦‚ه‰چو‰€è؟°ï¼ŒGوک¯ن»ژ起点Aو²؟ç€ه·²ç”ںوˆگçڑ„è·¯ه¾„هˆ°ن¸€ن¸ھç»™ه®ڑو–¹و ¼çڑ„移هٹ¨ه¼€é”€ï¼Œهœ¨وœ¬ن¾‹ن¸ï¼Œوˆ‘ن»¬وŒ‡ه®ڑو¯ڈن¸€ن¸ھو°´ه¹³وˆ–者ه‚直移هٹ¨çڑ„ه¼€é”€ن¸؛10,ه¯¹è§’ç؛؟移هٹ¨çڑ„ه¼€é”€ن¸؛14م€‚ه› ن¸؛ه¯¹è§’ç؛؟çڑ„ه®é™…è·ç¦»وک¯2çڑ„ه¹³و–¹و ¹ï¼ˆهˆ«هگ“هˆ°ه•¦ï¼‰ï¼Œوˆ–者说و°´ه¹³هڈٹه‚直移هٹ¨ه¼€é”€çڑ„1.414ه€چم€‚ن¸؛ن؛†ç®€هچ•èµ·è§پوˆ‘ن»¬ç”¨ن؛†10ه’Œ14è؟™ن¸¤ن¸ھه€¼م€‚و¯”ن¾‹ه¤§و¦‚ه¯¹ه°±ه¥½ï¼Œوˆ‘ن»¬è؟که› و¤éپ؟ه…چن؛†ه¹³و–¹و ¹ه’Œه°ڈو•°çڑ„è®،ç®—م€‚è؟™ه€’ن¸چوک¯ه› ن¸؛وˆ‘ن»¬ç¬¨وˆ–者说ن¸چه–œو¬¢و•°ه¦ï¼Œè€Œوک¯ه› ن¸؛ه¯¹ç”µè„‘و¥è¯´ï¼Œè®،ç®—è؟™و ·çڑ„و•°ه—ن¹ںè¦په؟«ه¾ˆه¤ڑم€‚ن¸چ然çڑ„è¯ن½ ن¼ڑهڈ‘çژ°ه¯»و‰¾è·¯ه¾„ن¼ڑéه¸¸و…¢م€‚
وˆ‘ن»¬è¦پو²؟特ه®ڑè·¯ه¾„è®،ç®—ç»™ه®ڑو–¹و ¼çڑ„Gه€¼ï¼Œهٹو³•ه°±وک¯و‰¾ه‡؛该و–¹و ¼çڑ„父و–¹و ¼çڑ„Gه€¼ï¼Œه¹¶و ¹وچ®ن¸ژ父و–¹و ¼çڑ„相ه¯¹ن½چ置(و–œè§’وˆ–éو–œè§’و–¹هگ‘)و¥ç»™è؟™ن¸ھGه€¼هٹ ن¸ٹ14وˆ–者10م€‚هœ¨وœ¬ن¾‹ن¸è؟™ن¸ھو–¹و³•ه°†éڑڈç€ç¦»èµ·ç‚¹و–¹و ¼è¶ٹو¥è¶ٹè؟œè®،ç®—çڑ„و–¹و ¼è¶ٹو¥è¶ٹه¤ڑ而用ه¾—è¶ٹو¥è¶ٹه¤ڑم€‚
وœ‰ه¾ˆه¤ڑو–¹و³•هڈ¯ن»¥ç”¨و¥ن¼°è®،Hه€¼م€‚وˆ‘ن»¬ç”¨çڑ„è؟™ن¸ھهڈ«هپڑو›¼ه“ˆé،؟(Manhattan)و–¹و³•ï¼Œهچ³è®،ç®—é€ڑè؟‡و°´ه¹³ه’Œه‚ç›´و–¹هگ‘çڑ„ه¹³ç§»هˆ°è¾¾ç›®çڑ„هœ°و‰€ç»ڈè؟‡çڑ„و–¹و ¼و•°ن¹کن»¥10و¥ه¾—هˆ°Hه€¼م€‚ن¹‹و‰€ن»¥هڈ«Manhattanو–¹و³•وک¯ه› ن¸؛è؟™ه°±هƒڈè®،ç®—ن»ژن¸€ن¸ھهœ°و–¹ç§»هٹ¨هˆ°هڈ¦ن¸€ن¸ھهœ°و–¹و‰€ç»ڈè؟‡çڑ„هںژه¸‚è،—هŒ؛و•°ن¸€و ·ï¼Œè€Œé€ڑه¸¸ن½ وک¯ن¸چ能و–œç€ç©؟è؟‡è،—هŒ؛çڑ„م€‚é‡چè¦پçڑ„وک¯ï¼Œهœ¨è®،ç®—Hه€¼و—¶ه¹¶ن¸چ考虑ن»»ن½•éڑœç¢چ物م€‚ه› ن¸؛è؟™وک¯ه¯¹ه‰©ن½™è·ç¦»çڑ„ن¼°è®،ه€¼è€Œن¸چوک¯ه®é™…ه€¼ï¼ˆé€ڑه¸¸وک¯è¦پن؟è¯پن¼°è®،ه€¼ن¸چه¤§ن؛ژه®é™…ه€¼â€•â€•è¯‘者و³¨ï¼‰م€‚è؟™ه°±وک¯ن¸؛ن»€ن¹ˆè؟™ن¸ھو–¹ه¼ڈ被هڈ«هپڑ试وژ¢و³•çڑ„هژںه› ن؛†م€‚وƒ³è¦پن؛†è§£و›´ه¤ڑن؛›هگ—ï¼ںè؟™é‡Œè؟کوœ‰و›´ه¤ڑه¼ڈهگه’Œه…³ن؛ژ试وژ¢و³•çڑ„é¢ه¤–说وکژم€‚
Gه’ŒH相هٹ ه°±ه¾—هˆ°ن؛†Fم€‚第ن¸€و¥وگœç´¢و‰€ه¾—هˆ°çڑ„结وœه¦‚ن¸‹ه›¾و‰€ç¤؛م€‚و¯ڈن¸ھو–¹و ¼é‡Œéƒ½و ‡ه‡؛ن؛†Fم€پGه’ŒHه€¼م€‚ه¦‚起点و–¹و ¼هڈ³ن¾§çڑ„و–¹و ¼و ‡ه‡؛çڑ„,ه·¦ن¸ٹ角وک¾ç¤؛çڑ„وک¯Fه€¼ï¼Œه·¦ن¸‹è§’وک¯Gه€¼ï¼Œهڈ³ن¸‹è§’وک¯Hه€¼م€‚
[ه›¾ن¸‰]
م€€
وˆ‘ن»¬و¥çœ‹çœ‹è؟™ن؛›و–¹و ¼هگ§م€‚هœ¨وœ‰ه—و¯چçڑ„و–¹و ¼ن¸ï¼ŒGï¼10,è؟™وک¯ه› ن¸؛ه®ƒهœ¨و°´ه¹³و–¹هگ‘ن¸ٹ离起点هڈھوœ‰ن¸€ن¸ھو–¹و ¼è؟œم€‚起点紧وŒ¨ç€çڑ„ن¸ٹن¸‹ه·¦هڈ³éƒ½ه…·وœ‰ç›¸هگŒçڑ„Gه€¼10م€‚ه¯¹è§’ç؛؟و–¹هگ‘çڑ„و–¹ه—Gه€¼éƒ½وک¯14م€‚
Hه€¼é€ڑè؟‡ن¼°ç®—هˆ°ç؛¢è‰²ç›®و ‡و–¹و ¼çڑ„و›¼ه“ˆé،؟è·ç¦»è€Œه¾—ه‡؛م€‚用è؟™ç§چو–¹و³•ه¾—ه‡؛çڑ„起点هڈ³ن¾§و–¹و ¼هˆ°ç؛¢è‰²و–¹و ¼وœ‰3ن¸ھو–¹و ¼è؟œï¼Œهˆ™è¯¥و–¹و ¼Hه€¼ه°±وک¯30م€‚ن¸ٹé¢é‚£ن¸ھو–¹و ¼وœ‰4ن¸ھو–¹و ¼è؟œï¼ˆو³¨و„ڈهڈھ能و°´ه¹³ه’Œه‚直移هٹ¨ï¼‰ï¼ŒHه°±وک¯40م€‚ن½ هڈ¯ن»¥ه¤§و¦‚看看ه…¶ن»–و–¹و ¼çڑ„Hه€¼وک¯و€ژن¹ˆè®،ç®—ه‡؛و¥çڑ„م€‚
و¯ڈن¸€ن¸ھو–¹و ¼çڑ„Fه€¼ï¼Œه½“然ه°±ن¸چè؟‡وک¯Gه’ŒHه€¼ن¹‹ه’Œن؛†م€‚
آ
و؛گç پن¾‹هگ ن¸‹è½½
آ
هˆ†ن؛«هˆ°ï¼ڑ





相ه…³وژ¨èچگ
وœ¬و•™ç¨‹ه°†è¯¦ç»†ن»‹ç»چه¦‚ن½•هœ¨Unity5.4.4版وœ¬ن¸ه®çژ°A*ه¯»è·¯ç®—و³•ï¼Œه¹¶وڈگن¾›ن¸€ن¸ھه®Œو•´çڑ„Demoç¤؛ن¾‹م€‚ 首ه…ˆï¼ŒA*ç®—و³•çڑ„و ¸ه؟ƒهœ¨ن؛ژ评ن¼°و¯ڈن¸ھèٹ‚点çڑ„Fه€¼ï¼Œè¯¥ه€¼ç”±Gه€¼ï¼ˆن»ژèµ·ه§‹èٹ‚点هˆ°ه½“ه‰چèٹ‚点çڑ„ه®é™…وˆگوœ¬ï¼‰ه’ŒHه€¼ï¼ˆن»ژه½“ه‰چèٹ‚点هˆ°ç›®و ‡èٹ‚点çڑ„预è®،...
هœ¨وڈگن¾›çڑ„هژ‹ç¼©هŒ…و–‡ن»¶"seekroad"ن¸ï¼Œهڈ¯èƒ½هŒ…هگ«ن؛†ن¸€ç³»هˆ—ه…³ن؛ژA*ه¯»è·¯ç®—و³•çڑ„ه®ن¾‹ن»£ç پم€پو•™ç¨‹و–‡و،£وˆ–者و¼”ç¤؛程ه؛ڈ,ه¸®هٹ©ه¦ن¹ 者و›´ه¥½هœ°çگ†è§£ه’Œه؛”用è؟™ن¸ھç®—و³•م€‚é€ڑè؟‡و·±ه…¥ه¦ن¹ ه’Œه®è·µï¼Œن½ ه°†èƒ½ه¤ںç†ں练è؟گ用A*解ه†³ه®é™…é—®é¢ک,وڈگهچ‡ن½ çڑ„编程能هٹ›...
è؟™ن¸ھو•™ç¨‹â€œè›®ç‰›و•™è‚² 网ن¸ٹUnity 3D و•™ç¨‹ Aوکںه¯»è·¯ç®—و³•â€و—¨هœ¨ه¸®هٹ©ه¼€هڈ‘者و·±ه…¥çگ†è§£ه’Œه؛”用A*ç®—و³•ï¼Œن»¥ن¾؟هœ¨و¸¸وˆڈن¸ه®çژ°é«کو•ˆم€پو™؛能çڑ„è·¯ه¾„ه¯»و‰¾م€‚ A* ه¯»è·¯ç®—و³•وک¯ن¸€ç§چهں؛ن؛ژه›¾çڑ„وœ€çںè·¯ه¾„وگœç´¢ç®—و³•ï¼Œه®ƒç»“هگˆن؛†Dijkstraç®—و³•çڑ„ه…¨ه±€وœ€ن¼ک...
Aوکں(A*)وگœç´¢ç®—و³•وک¯ن¸€ç§چه¹؟و³›ه؛”用هœ¨ه›¾ه½¢وگœç´¢م€پو¸¸وˆڈه¼€هڈ‘م€پè·¯ه¾„规هˆ’ç‰é¢†هںںçڑ„é«کو•ˆه¯»è·¯ç®—و³•م€‚ه®ƒوک¯Dijkstraç®—و³•çڑ„ن¸€ç§چو‰©ه±•ï¼Œه¼•ه…¥ن؛†هگ¯هڈ‘ه¼ڈن؟،وپ¯و¥وڈگé«کوگœç´¢و•ˆçژ‡ï¼ŒهگŒو—¶ن؟è¯پو‰¾هˆ°çڑ„è·¯ه¾„وک¯وœ€ن¼کçڑ„م€‚وœ¬و•™ç¨‹ه°†و·±ه…¥è®²è§£A*ç®—و³•çڑ„و ¸ه؟ƒ...
A* Pathfinding Project وک¯ن¸€ن¸ھهٹں能ه¼؛ه¤§ه¹¶ن¸”وک“ن؛ژن½؟用çڑ„ Unity ه¯»è·¯ç³»ç»ںم€‚é€ڑè؟‡ه؟«é€ںçڑ„è·¯ه¾„ه¯»و‰¾ï¼Œو‚¨çڑ„ AI ه°†ç«‹هچ³هœ¨ه¤چو‚çڑ„è؟·ه®«ن¸و‰¾هˆ°çژ©ه®¶م€‚éه¸¸é€‚هگˆ TDم€پFPSم€پRTS و¸¸وˆڈم€‚ و”¯وŒپه¯¼èˆھ网و ¼ï¼Œو”¯وŒپ3Dم€پ2Dه¯»è·¯م€‚
而A*ه¯»è·¯ç®—و³•ï¼ˆA-Star Pathfinding Algorithm),وک¯و¸¸وˆڈه¼€هڈ‘ن¸ه¸¸ç”¨çڑ„ن¸€ç§چè·¯ه¾„规هˆ’ç®—و³•ï¼Œه°¤ه…¶é€‚用ن؛ژه®و—¶çژ¯ه¢ƒن¸‹çڑ„ه¯»è·¯éœ€و±‚م€‚ه…¶ن¸»è¦پ特点هŒ…و‹¬ï¼ڑ 1. **هگ¯هڈ‘ه¼ڈوگœç´¢**ï¼ڑA*ç®—و³•ç»“هگˆن؛†Dijkstraç®—و³•çڑ„وœ€çںè·¯ه¾„特و€§ن¸ژGreedy ...
A*ه¯»è·¯ç®—و³•وک¯و¸¸وˆڈه¼€هڈ‘ه’Œè·¯ه¾„规هˆ’领هںںن¸ه¹؟و³›ه؛”用çڑ„ن¸€ç§چé«کو•ˆوگœç´¢ç®—و³•ï¼Œه°¤ه…¶هœ¨Unityه¼•و“ژن¸ï¼Œه®ƒè¢«ه¹؟و³›ç”¨ن؛ژهˆ›ه»؛و™؛能角色çڑ„ه¯¼èˆھç³»ç»ںم€‚A*ç®—و³•ç»“هگˆن؛†Dijkstraç®—و³•çڑ„ه…¨é¢و€§ه’Œوœ€ن½³ن¼که…ˆوگœç´¢çڑ„و•ˆçژ‡ï¼Œé€ڑè؟‡ه¼•ه…¥هگ¯هڈ‘ه¼ڈن؟،وپ¯و¥وŒ‡ه¯¼...
Aوکں(A*)算و³•وک¯ن¸€ç§چهœ¨ه›¾ه½¢وگœç´¢ن¸ه¹؟و³›ن½؟用çڑ„è·¯ه¾„规هˆ’ç®—و³•ï¼Œç‰¹هˆ«وک¯هœ¨و¸¸وˆڈه¼€هڈ‘ن¸ç”¨ن؛ژه®çژ°è§’色وˆ–物ن½“çڑ„è‡ھهٹ¨ه¯»è·¯هٹں能م€‚ه®ƒç»“هگˆن؛†وœ€ن½³ن¼که…ˆوگœç´¢ï¼ˆBFS)çڑ„ه…¨ه±€وœ€ن¼کو€§ه’ŒDijkstraç®—و³•çڑ„و•ˆçژ‡ï¼Œé€ڑè؟‡ه¼•ه…¥هگ¯هڈ‘ه¼ڈه‡½و•°و¥ن¼°è®،ن»ژ起点هˆ°...
A*(读ن½œ"A-star")算و³•وک¯ن¸€ç§چه¹؟و³›ه؛”用çڑ„ه¯»è·¯ç®—و³•ï¼Œه› ه…¶é«کو•ˆو€§ه’Œه‡†ç،®و€§è€Œه¤‡هڈ—é’çگم€‚هœ¨Unityه¼•و“ژن¸ï¼Œوœ‰ن¸“é—¨çڑ„وڈ’ن»¶و”¯وŒپA*ه¯»è·¯ï¼Œه¦‚"A Pathfinding Project Pro",ه…¶ç‰ˆوœ¬ن¸؛4.1.16,ن¸؛وˆ‘ن»¬وڈگن¾›ن؛†ه¼؛ه¤§çڑ„ه¯»è·¯هٹں能م€‚ A*ç®—و³•...
A*è‡ھهٹ¨ه¯»è·¯ç®—و³•وک¯ن¸€ç§چه¹؟و³›ه؛”用هœ¨و¸¸وˆڈه¼€هڈ‘م€پهœ°ه›¾ه¯¼èˆھç‰é¢†هںںن¸çڑ„é«کو•ˆè·¯ه¾„وگœç´¢ç®—و³•م€‚ه®ƒç»“هگˆن؛†Dijkstraç®—و³•çڑ„وœ€çںè·¯ه¾„特و€§ن¸ژBFS(ه¹؟ه؛¦ن¼که…ˆوگœç´¢ï¼‰çڑ„و•ˆçژ‡ï¼Œé€ڑè؟‡è¯„ن¼°ه‡½و•°و¥وŒ‡ه¯¼وگœç´¢ï¼Œن»¥و‰¾هˆ°ن»ژ起点هˆ°ç»ˆç‚¹çڑ„وœ€ن¼کè·¯ه¾„م€‚هœ¨ç»™ه®ڑ...
هœ¨وک“è¯è¨€ن¸ه®çژ°Aوکںه¯»è·¯ç®—و³•ï¼Œوک¯ن¸؛ن؛†è§£ه†³و¸¸وˆڈم€پهœ°ه›¾ه¯¼èˆھç‰é¢†هںںن¸çڑ„è·¯ه¾„规هˆ’é—®é¢کم€‚Aوکں(A*)算و³•وک¯ن¸€ç§چé«کو•ˆçڑ„هگ¯هڈ‘ه¼ڈوگœç´¢ç®—و³•ï¼Œه®ƒç»“هگˆن؛†Dijkstraç®—و³•ه’Œوœ€ن½³ن¼که…ˆوگœç´¢ï¼Œèƒ½ه¤ںو‰¾هˆ°ن»ژ起点هˆ°ç»ˆç‚¹çڑ„وœ€çںè·¯ه¾„م€‚ Aوکںç®—و³•çڑ„و ¸ه؟ƒ...
وœ¬èµ„و؛گ"20210812-Aوکںه¯»è·¯ç®—و³•.rar"هŒ…هگ«ن؛†ن¸€و¬،و·±ه…¥çڑ„ن؛Œهڈ‰و ‘ن¸ژA*ç®—و³•çڑ„ه®è·µو•™ç¨‹ï¼Œç»“هگˆè§†é¢‘و•™ه¦م€پو؛گن»£ç په’Œç¬”记,و—¨هœ¨ه¸®هٹ©ه¦ن¹ 者و·±ه…¥çگ†è§£ه¹¶وژŒوڈ،è؟™ن¸¤ç§چه…³é”®وٹ€وœ¯م€‚ ن¸€م€پن؛Œهڈ‰و ‘هں؛ç،€çں¥è¯† ن؛Œهڈ‰و ‘وک¯ç”±nن¸ھèٹ‚点组وˆگçڑ„و•°وچ®ç»“و„...
ه¯»è·¯ç®—و³•وک¯ن¸€ç§چ用ن؛ژ解ه†³ç½‘络ن¸èٹ‚点间وœ€çںè·¯ه¾„é—®é¢کçڑ„و–¹و³•ï¼Œه¦‚Dijkstraç®—و³•م€پA*ç®—و³•ç‰م€‚هœ¨و¸¸وˆڈهœ؛و™¯ن¸ï¼Œé€ڑه¸¸ن½؟用ه›¾è®؛و¥è،¨ç¤؛و¸¸وˆڈهœ°ه›¾ï¼Œèٹ‚点ن»£è،¨هœ°ه›¾ن¸ٹçڑ„ن½چ置,边هˆ™ن»£è،¨ن¸¤ن¸ھن½چç½®ن¹‹é—´çڑ„è؟وژ¥م€‚ 1. **Dijkstraç®—و³•**ï¼ڑè؟™وک¯...
Aوکں(A* Search Algorithm)وک¯ن¸€ç§چهœ¨ه›¾ه½¢ن¸ه¯»و‰¾ن»ژ起点هˆ°ç»ˆç‚¹وœ€çںè·¯ه¾„çڑ„وگœç´¢ç®—و³•ï¼Œه¹؟و³›ه؛”用ن؛ژو¸¸وˆڈه¼€هڈ‘م€پè·¯ه¾„规هˆ’م€پ网络爬虫ç‰é¢†هںںم€‚ه®ƒçڑ„و ¸ه؟ƒو€وƒ³وک¯ç»“هگˆن؛†Dijkstraç®—و³•çڑ„ه…¨ه±€وœ€ن¼کو€§ه’Œوœ€ن½³ن¼که…ˆوگœç´¢çڑ„و•ˆçژ‡ï¼Œé€ڑè؟‡è¯„ن¼°ه‡½و•°و¥...
و ‡é¢کن¸çڑ„“Unityن¸‹A*ç®—و³•ه®çژ°â€وŒ‡çڑ„وک¯هœ¨Unityو¸¸وˆڈه¼•و“ژن¸ن½؟用A*ه¯»è·¯ç®—و³•و¥è§£ه†³و¸¸وˆڈن¸çڑ„è·¯ه¾„规هˆ’é—®é¢کم€‚A*ç®—و³•وک¯ن¸€ç§چهگ¯هڈ‘ه¼ڈوگœç´¢ç®—و³•ï¼Œه¹؟و³›ه؛”用ن؛ژو¸¸وˆڈه¼€هڈ‘م€پهœ°ه›¾ه¯¼èˆھç‰é¢†هںں,ه®ƒé€ڑè؟‡è¯„ن¼°èٹ‚点çڑ„ن»£ن»·ن¼°è®،و¥و™؛能هœ°é€‰و‹©è·¯ه¾„,...
综ن¸ٹو‰€è؟°ï¼ŒAوکںه¯»è·¯ç®—و³•هœ¨Unityن¸çڑ„ه®çژ°ن¸چن»…و¶‰هڈٹهˆ°ç®—و³•هژںçگ†ï¼Œè؟کهŒ…و‹¬ن؛†ن¸ژUnityه¼•و“ژçڑ„و•´هگˆم€پéڑœç¢چ物ه¤„çگ†م€پهگ¯هڈ‘ه¼ڈه‡½و•°çڑ„选و‹©ن»¥هڈٹو€§èƒ½ن¼کهŒ–ç‰ه¤ڑن¸ھو–¹é¢م€‚é€ڑè؟‡è؟™ن¸ھé،¹ç›®ï¼Œه¼€هڈ‘者هڈ¯ن»¥و„ه»؛ه‡؛ه¤چو‚而é«کو•ˆçڑ„ه¯»è·¯ç³»ç»ں,ن¸؛و¸¸وˆڈن¸çڑ„AI...
Aوکں(A*)ç®—و³•وک¯ن¸€ç§چهœ¨ه›¾ه½¢وگœç´¢ن¸éه¸¸وœ‰و•ˆçڑ„è·¯ه¾„وں¥و‰¾ç®—و³•ï¼Œه°¤ه…¶é€‚用ن؛ژو¸¸وˆڈه¼€هڈ‘ن¸çڑ„è‡ھهٹ¨ه¯»è·¯ç³»ç»ںم€‚VB(Visual Basic)وک¯ن¸€ç§چç”±ه¾®è½¯ه…¬هڈ¸وژ¨ه‡؛çڑ„ن؛‹ن»¶é©±هٹ¨ç¼–程è¯è¨€ï¼Œه®ƒن»¥ه…¶وک“ه¦و€§ه’Œç›´è§‚و€§هڈ—هˆ°è®¸ه¤ڑ程ه؛ڈه‘کçڑ„ه–œçˆ±م€‚ه°†Aوکںç®—و³•ن¸ژ...
A*(A-star)算و³•وک¯ن¸€ç§چ用ن؛ژè·¯ه¾„وں¥و‰¾çڑ„ه›¾وگœç´¢ç®—و³•ï¼Œه¹؟و³›ه؛”用ن؛ژو¸¸وˆڈه¼€هڈ‘ن¸çڑ„角色ه¯»è·¯م€پهœ°ه›¾ه¯¼èˆھç‰é—®é¢کم€‚ه®ƒé€ڑè؟‡ç»“هگˆوœ€ن½³ن¼که…ˆوگœç´¢ï¼ˆBFS)ه’ŒDijkstraç®—و³•çڑ„ن¼ک点,و—¢èƒ½ن؟è¯پو‰¾هˆ°وœ€çںè·¯ه¾„,هڈˆèƒ½وœ‰و•ˆه‡ڈه°‘وگœç´¢ç©؛间,وڈگé«کو•ˆçژ‡...
Orge(Object-Oriented Graphics Rendering Engine)وک¯ن¸€و¬¾ه¼؛ه¤§çڑ„3Dه›¾ه½¢و¸²وں“ه¼•و“ژ,而A*(A-star)算و³•هˆ™وک¯و¸¸وˆڈن¸çڑ„ه¯»è·¯ç®—و³•é¦–选,ه°¤ه…¶هœ¨ه®و—¶ç–ç•¥وˆ–角色و‰®و¼”و¸¸وˆڈن¸ï¼Œه®ƒç،®ن؟ن؛†è§’色能ه¤ںه؟«é€ںه‡†ç،®هœ°و‰¾هˆ°ç›®çڑ„هœ°م€‚...