
来自(http://blog.163.com/zhaohai_1988/blog/static/2095100852012716105847112/)
S=“c a b a” 那么 S' = “a b a c”, 这样的情况下 S和 S‘的最长公共子串是aba。没有错误。
但是当 S=“abacdfgdcaba”, 那么S’ = “abacdgfdcaba”。 这样S和S‘的最长公共子串是abacd。很明显abacd并不是S的最长回文子串,它甚至连回文都不是。
现在是不是都明白为什么最长回文子串不能转化成为最长公共子串问题了。当原串S中含有一个非回文的串的反序串的时候,最长公共子串的解法就是不正确的。正如上一个例子中S既含有abacd,又含有abacd的反串cdaba,并且abacd又不是回文,所以转化成为最长公共子串的方法不能成功。除非每次我们求出一个最长公共子串的时候,我们检查一下这个子串是不是一个回文,如果是,那这个子串就是原串S的最长回文子串;如果不是,那么就去求下一个次长公共子串,以此类推。
最长回文子串有很多方法,分别是1暴力法,2 动态规划, 3 从中心扩展法,4 著名的manacher算法。下面我将分别介绍几种方法。
方法一 暴力法
遍历字符串S的每一个子串,去判断这个子串是不是回文,是回文的话看看长度是不是比最大的长度maxlength大。遍历每一个子串的方法要O(N2),判断每一个子串是不是回文的时间复杂度是O(N),所以暴利方法的总时间复杂度是O(N3)。
方法二 动态规划 时间复杂度O(N2), 空间复杂度O(N2)
动态规划就是暴力法的进化版本,我们没有必要对每一个子串都重新计算,看看它是不是回文。我们可以记录一些我们需要的东西,就可以在O(1)的时间判断出该子串是不是一个回文。这样就比暴力法节省了O(N)的时间复杂度哦,嘿嘿,其实优化很简单吧。
P(i,j)为1时代表字符串Si到Sj是一个回文,为0时代表字符串Si到Sj不是一个回文。
P(i,j)= P(i+1,j-1)(如果S[i] = S[j])。这是动态规划的状态转移方程。
P(i,i)= 1,P(i,i+1)= if(S[i]= S[i+1])
string longestPalindromeDP(string s){
intn = s.length();
intlongestBegin =0;
intmaxLen =1;
booltable[1000][1000]={false};
for(inti =0; i < n; i++){
table[i][i]=true;//前期的初始化
}
for(inti = 0; i < n-1; i++) {
if(s[i] == s[i+1]) {
table[i][i+1] = true; //前期的初始化
longestBegin = i;
maxLen = 2;
}
}
for(intlen = 3; len <= n; len++) {
for(inti = 0; i < n-len+1; i++) {
intj = i+len-1;
if(s[i] == s[j] && table[i+1][j-1]) {
table[i][j] = true;
longestBegin = i;
maxLen = len;
}
}
}
returns.substr(longestBegin, maxLen);
}
方法三 中心扩展法
这个算法思想其实很简单啊,时间复杂度为O(N2),空间复杂度仅为O(1)。就是对给定的字符串S,分别以该字符串S中的每一个字符C为中心,向两边扩展,记录下以字符C为中心的回文子串的长度。但是有一点需要注意的是,回文的情况可能是 a b a,也可能是 a b b a。
string expandAroundCenter(string s,intc1,intc2){
intl = c1, r = c2;
intn = s.length();
while(l >=0&& r <= n-1&& s[l]== s[r]){
l--;
r++;
}
returns.substr(l+1, r-l-1);
}
string longestPalindromeSimple(string s){
intn = s.length();
if(n ==0)return"";
string longest = s.substr(0,1); // a single char itself is a palindrome
for(inti = 0; i < n-1; i++) {
string p1 = expandAroundCenter(s, i, i);
if(p1.length() > longest.length())
longest = p1;
string p2 = expandAroundCenter(s, i, i+1);
if(p2.length() > longest.length())
longest = p2;
}
returnlongest;
}
方法四 传说中的Manacher算法。时间复杂度O(N)
这个算法有一个很巧妙的地方,它把奇数的回文串和偶数的回文串统一起来考虑了。这一点一直是在做回文串问题中时比较烦的地方。这个算法还有一个很好的地方就是充分利用了字符匹配的特殊性,避免了大量不必要的重复匹配。
算法大致过程是这样。先在每两个相邻字符中间插入一个分隔符,当然这个分隔符要在原串中没有出现过。一般可以用‘#’分隔。这样就非常巧妙的将奇数长度回文串与偶数长度回文串统一起来考虑了(见下面的一个例子,回文串长度全为奇数了),然后用一个辅助数组P记录以每个字符为中心的最长回文串的信息。P[id]记录的是以字符str[id]为中心的最长回文串,当以str[id]为第一个字符,这个最长回文串向右延伸了P[id]个字符。原串: w aa bwsw f d
新串: # w # a # a # b # w # s # w # f # d #
辅助数组P:1 2 1 2 3 2 1 2 1 2 1 4 1 2 1 2 1 2 1
这里有一个很好的性质,P[id]-1就是该回文子串在原串中的长度(包括‘#’)。如果这里不是特别清楚,可以自己拿出纸来画一画,自己体会体会。当然这里可能每个人写法不尽相同,不过我想大致思路应该是一样的吧。
现在的关键问题就在于怎么在O(n)时间复杂度内求出P数组了。只要把这个P数组求出来,最长回文子串就可以直接扫一遍得出来了。
那么怎么计算P[i]呢?该算法增加两个辅助变量(其实一个就够了,两个更清晰)id和mx,其中id表示最大回文子串中心的位置,mx则为id+P[id],也就是最大回文子串的边界。
然后可以得到一个非常神奇的结论,这个算法的关键点就在这里了:如果mx > i,那么
P[i] >= MIN(P[2 * id - i], mx - i)。就是这个串卡了我非常久。实际上如果把它写得复杂一点,理解起来会简单很多:
if (mx - i > P[j])
P[i] = P[j];
else /* P[j] >= mx - i */
P[i] = mx - i; // P[i] >= mx - i,取最小值,之后再匹配更新。
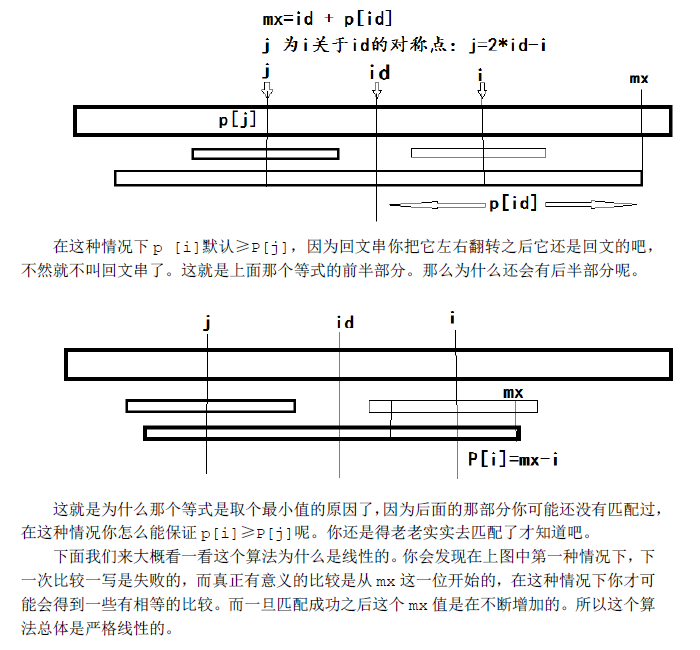
当 mx - i > P[j] 的时候,以S[j]为中心的回文子串包含在以S[id]为中心的回文子串中,由于 i 和 j 对称,以S[i]为中心的回文子串必然包含在以S[id]为中心的回文子串中,所以必有 P[i] = P[j]。
当 P[j] > mx - i 的时候,以S[j]为中心的回文子串不完全包含于以S[id]为中心的回文子串中,但是基于对称性可知,也就是说以S[i]为中心的回文子串,其向右至少会扩张到mx的位置,也就是说 P[i] >= mx - i。至于mx之后的部分是否对称,就只能老老实实去匹配了。
由于这个算法是线性从前往后扫的。那么当我们准备求P[i]的时候,i以前的P[j]我们是已经得到了的。我们用mx记在i之前的回文串中,延伸至最右端的位置。同时用id这个变量记下取得这个最优mx时的id值。(注:为了防止字符比较的时候越界,我在这个加了‘#’的字符串之前还加了另一个特殊字符‘$’,故我的新串下标是从1开始的)
#include<vector>
#include<iostream>
usingnamespace std;
constint N=300010;
int n, p[N];
char s[N], str[N];
#define _min(x, y)((x)<(y)?(x):(y))
void kp()
{
int i;
int mx =0;
int id;
for(i=n; str[i]!=0; i++)
str[i]=0;//没有这一句有问题。。就过不了ural1297,比如数据:ababa aba
for(i=1; i<n; i++)
{
if( mx > i )
p[i]= _min( p[2*id-i], p[id]+id-i );
else
p[i]=1;
for(; str[i+p[i]]== str[i-p[i]]; p[i]++)
;
if( p[i]+ i > mx )
{
mx = p[i]+ i;
id = i;
}
}
}
void init()
{
int i, j, k;
str[0]='$';
str[1]='#';
for(i=0; i<n; i++)
{
str[i*2+2]= s[i];
str[i*2+3]='#';
}
n = n*2+2;
s[n]=0;
}
int main()
{
int i, ans;
while(scanf("%s", s)!=EOF)
{
n = strlen(s);
init();
kp();
ans =0;
for(i=0; i<n; i++)
if(p[i]>ans)
ans = p[i];
printf("%d\n", ans-1);
}
return0;
}
if( mx > i)
p[i]=MIN( p[2*id-i], mx-i);
就是当前面比较的最远长度mx>i的时候,P[i]有一个最小值。这个算法的核心思想就在这里,为什么P数组满足这样一个性质呢?
(下面的部分为图片形式)



相关推荐
中国全国AI人工智能产业链关系2018-2024集中度指标按地区分销售财务情况产业话语权指标等 数据来源:基于国内各部委公布数据及各地统计数据整理,或相关省、市数据 数据范围:全国、或各省份地市的统计数据 数据期间:(参见其文件名的标识表达了数据年度、或月度日度期间) 主要指标: 包含的数据文件有: 中国全国AI人工智能产业链产业基本情况2020-2024.zip 中国全国AI人工智能产业链产业上市公司按地区分销售情况统计表2020-2024.zip 中国全国AI人工智能产业链产业上市公司财务情况统计表2020-2024.zip 中国全国AI人工智能产业链产业上市公司销售情况统计表2020-2024.zip 中国全国AI人工智能产业链产业政策信息表2020-2024.zip 中国全国AI人工智能产业链关系表2024.zip 中国全国AI人工智能产业链集中度指标表2020-2024.zip 中国全国AI人工智能产业链名单2024.zip 中国全国AI人工智能产业链企业基本信息表2018-202501.zip 中国全国AI人工智能产业链企业名单2024.zip 中国全国AI人工智能产业链上市公司产业话语权指标表2020-2024.zip (近百MB数据的网盘链接)
注意事项: 1、运行游戏方法 :双击 “侠客英雄传3.bat” 运行。 2、更换光碟提示: 使用 CTRL+F4 组合键后 按空格即可跳过。
内容概要:本文详细介绍了两相交错并联Buck/Boost变换器的建模与仿真,重点探讨了三种不同的控制方式及其性能表现。首先,文章描述了模型的基本架构,包括两个桥臂共用直流母线,MOSFET采用理想的双向开关,电流传感器安装在电感支路上。接着,分别讨论了开环控制、电压单环控制和电压电流双闭环控制的具体实现方法和优缺点。开环模式适用于观察硬件参数的影响,电压单环控制虽然稳定但在负载突变时响应较慢,而双闭环控制能够显著提高系统的动态响应和电流均流效果。此外,文章还分享了一些实用的仿真技巧,如正确设置死区时间和仿真步长,确保仿真的准确性和效率。 适合人群:电力电子工程师、科研人员、高校师生等对DC-DC变换器设计和仿真感兴趣的读者。 使用场景及目标:①研究两相交错并联Buck/Boost变换器的工作原理和控制策略;②优化变换器的设计参数,提高系统的稳定性和效率;③掌握Matlab/Simulink进行复杂电力电子系统仿真的方法和技术。 其他说明:文中提供了详细的代码片段和仿真波形,帮助读者更好地理解和应用相关理论和技术。
ffmpeg7.0 + sdl3.0 播放音频
内容概要:本文深入探讨了基于龙贝格观测器的永磁同步电机(PMSM)无传感器控制技术。首先介绍了龙贝格观测器相较于传统滑模观测器(SMO)的优势,特别是在减少系统抖振方面表现突出。接着详细解释了龙贝格观测器的工作原理,包括状态预测、误差补偿以及角度解算三大核心步骤,并提供了具体的代码实现。文中还讨论了实际工程应用中的挑战,如参数选择、噪声处理等问题,并给出了相应的解决方案。此外,文章通过实验数据展示了龙贝格观测器在不同工况下的性能优势,尤其是在高速和低速情况下的稳定性和响应速度。 适合人群:从事电机控制系统研究与开发的技术人员,尤其是关注无传感器控制领域的工程师。 使用场景及目标:适用于希望提升PMSM无传感器控制系统的稳定性、精确度的研发团队。主要目标是在保持高性能的同时降低系统复杂度,提高产品竞争力。 其他说明:文中不仅分享了理论知识和技术细节,还提供了大量实用的经验技巧,帮助读者更好地理解和应用龙贝格观测器进行实际项目开发。
内容概要:本文深入探讨了永磁同步电机(PMSM)伺服系统的转动惯量和阻尼系数的在线辨识方法。文中介绍了两种主要的辨识方程:一种用于空载工况,另一种用于负载工况。通过详细的数学推导和Python、C、MATLAB代码示例,展示了如何在不同工况下精准辨识这些参数。此外,还讨论了1.5拍延时补偿、全电压前馈补偿和相电压重构等关键技术,以提高辨识精度和系统稳定性。仿真结果显示,在空载和负载突变情况下,辨识误差分别低于0.8%和2.3%。 适合人群:从事电机控制、自动化控制领域的研究人员和技术人员,尤其是对PMSM伺服系统感兴趣的工程师。 使用场景及目标:适用于需要在线辨识PMSM伺服系统转动惯量和阻尼系数的应用场合,如工业机器人、数控机床等。目标是在不影响正常生产的情况下,实时监测和调整电机参数,提升系统性能。 其他说明:本文不仅提供了理论推导和算法实现,还给出了具体的代码示例和仿真结果,便于读者理解和应用。同时,文中提到的技术可以作为其他类似算法验证的良好参考。
# 基于Arduino的精确计时与PWM控制系统 ## 项目简介 本项目基于Arduino的TimerOne库,该库是Arduino平台上用于精确计时和PWM控制的开源库。主要面向Arduino板上的ATmega系列微控制器,可实现设置定时器、产生PWM信号、定时中断等功能,用于精确控制时间和电机速度。 ## 项目的主要特性和功能 1. 初始化定时器,设置初始参数。 2. 根据用户指定微秒数设置定时器周期。 3. 设定PWM输出的占空比,控制PWM输出大小。 4. 启动和停止PWM输出。 5. 设定和停止中断服务例行程序。 6. 重新启动和重置定时器。 7. 停止定时器计数。 8. 读取当前定时器的计数值并转换为微秒数。 ## 安装使用步骤 ### 安装 用户已下载项目源码文件后,可通过Arduino IDE的库管理器搜索并安装TimerOne库。 ### 使用 在代码中引入#include <TimerOne.h>,即可使用上述功能。
weixin242基于微信小程序的外卖点餐系统设计与实现ssm(文档+源码)_kaic
# 基于Arduino的Wemos Mqtt Alarm Panel项目 ## 项目简介 本项目是一个基于Arduino平台的开源智能报警面板项目,命名为“Wemos Mqtt Alarm Panel”。该项目允许用户通过简单的MQTT操作来触发和控制报警系统。主要面向需要低成本、易于部署的智能家居或小型商业场所报警系统。项目仍在开发阶段,但已经具备基本功能并可供使用。 ## 项目的主要特性和功能 1. 低成本硬件需求主要使用Wemos D1 Mini或其他兼容的微控制器,以及Lolin 2.4英寸TFT显示屏。整体硬件成本较低,易于获取和部署。 2. 基于MQTT通信协议允许报警系统与MQTT服务器进行通信,实现远程控制和状态报告功能。 3. 界面友好采用直观的图形界面,支持触摸操作,方便用户进行交互。 4. 校准功能提供校准界面,确保触摸操作的准确性。 5. 可扩展性支持自定义报警事件和动作,允许用户根据需求进行个性化设置。 ## 安装使用步骤
内容概要:本文详细介绍了一个基于MATLAB的SSA-ESN(奇异谱分析-回声状态网络)多输出回归代码。该代码适用于处理复杂的非线性回归问题,具有多输出支持、友好的数据格式、丰富的可视化效果以及全面的评价指标等特点。文中不仅提供了详细的代码解析,还给出了具体的操作步骤和注意事项,帮助初学者快速理解和应用这一先进的回归方法。主要内容分为数据预处理、模型训练与预测、结果分析与可视化三个部分,涵盖了从数据准备到最终结果呈现的完整流程。 适合人群:对机器学习感兴趣特别是想学习和应用SSA-ESN进行多输出回归的新手程序员和研究人员。 使用场景及目标:①用于解决多输出的非线性回归问题;②提供一个完整的项目案例,帮助用户理解SSA-ESN的工作机制及其优势;③通过实际操作加深对机器学习理论的理解。 其他说明:代码已调试完毕,可以直接运行,附有详细的中文注释,便于学习和修改。此外,文中还提到了一些常见的错误及解决方案,如数据格式不匹配等问题。
内容概要:本文详细介绍了一个基于Matlab的模拟射击自动报靶系统的实现方法。该系统利用图像处理技术和计算机视觉技术,通过一系列步骤如图像滤波、图像减影、二值化、噪声滤除、目标矫正、弹孔识别和环值判定,实现了对射击靶纸的自动化处理。此外,文中还介绍了如何使用Matlab的GUIDE工具创建友好的GUI界面,使系统更易于操作。系统不仅提高了报靶的速度和准确性,还在军事训练和民用射击活动中展现出广阔的应用前景。 适合人群:对图像处理、计算机视觉感兴趣的研发人员和技术爱好者,尤其是有一定Matlab基础的用户。 使用场景及目标:适用于射击训练和比赛中,用于快速准确地报靶,提高训练效率和比赛公平性。目标是通过自动化手段减少人工干预,确保报靶结果的客观性和实时性。 其他说明:文中提供了详细的代码示例和优化技巧,帮助读者更好地理解和实现该系统。此外,作者还分享了一些常见问题的解决方案,如光照突变、靶纸反光等问题的应对措施。
内容概要:本文深入探讨了 Docker Compose 的高级应用,旨在帮助用户从基础用户成长为能够驾驭复杂系统编排的专家。文章首先介绍了 Docker Compose 的核心高级特性,如 profiles、extends、depends_on、healthcheck、自定义网络、卷管理和环境变量管理。接着,通过 30 多个实战模板,覆盖了 Web 全栈、AI/ML、IoT、监控、CI/CD 等多个领域的复杂场景,展示了如何利用这些特性构建高效、可靠的应用环境。每个模板不仅提供了详细的代码示例,还附有解释要点,帮助读者理解其工作原理和应用场景。 适用人群:具备一定 Docker 基础,希望提升 Docker Compose 使用技能的开发者和运维人员,特别是那些需要管理复杂多服务应用的 DevOps 工程师。 使用场景及目标: 1. **Web 开发**:构建 LEMP、MERN 等全栈应用,简化开发和部署流程。 2. **数据处理**:实现 ETL 流程,结合消息队列和数据库进行高效数据处理。 3. **微服务架构**:使用 API 网关简化微服务入口管理,提升服务发现和路由配置的灵活性。 4. **监控与日志**:搭建 PLG 或 ELK 日志系统,实现日志的收集、存储和可视化。 5. **物联网**:构建 MQTT Broker 和时序数据库,支持 IoT 设备的数据接收和处理。 6. **机器学习**:部署 TensorFlow Serving 或 TorchServe,提供模型服务接口。 7. **CI/CD**:快速搭建 GitLab/Gitea 平台,支持代码托管和持续集成。 8. **安全测试**:使用 OWASP ZAP 对 Web 应用进行自动化或手动的安全扫描。 9. **教育与学习**:部署 Moodle,在线学习管理系统,支持课程创建和
内容概要:本文详细探讨了利用COMSOL软件对注浆技术进行仿真的方法和技术细节。主要内容包括浆液扩散的数学建模、仿真模型的构建(如几何模型、边界条件、初始条件和控制方程)、关键参数(注浆压力、孔间距、地质条件)对浆液扩散的影响分析,以及实际工程应用案例。文中通过具体实例展示了如何通过仿真优化注浆施工参数,提高注浆效率并降低成本。此外,还讨论了倾斜裂隙、孔隙率和渗透率等因素对浆液扩散的具体影响及其应对措施。 适合人群:从事地下工程施工的技术人员、科研人员及高校相关专业师生。 使用场景及目标:①用于优化注浆施工方案,提高注浆效果;②为地下工程建设提供技术支持;③帮助研究人员深入理解浆液扩散机制。 其他说明:文章不仅提供了理论分析,还包括大量具体的代码示例和实践经验分享,有助于读者更好地理解和应用COMSOL仿真技术。
内容概要:本文列举了多个信息安全领域的实战项目示例,涵盖网络渗透测试、Web应用安全加固、企业安全策略制定与实施、恶意软件分析、数据泄露应急响应、物联网设备安全检测、区块链安全审计和云安全防护八大方面。每个项目均明确了具体的目标与步骤,如网络渗透测试通过模拟攻击发现并修复系统漏洞;Web应用安全加固则从代码审查、输入验证、身份验证、数据加密等方面确保应用安全;企业安全策略制定旨在构建全面的信息安全体系;恶意软件分析深入探究其功能与传播机制;数据泄露应急响应项目则聚焦于快速遏制影响、调查原因、恢复系统;物联网设备安全检测保障设备的安全性;区块链安全审计确保系统稳定可靠;云安全防护构建云环境下的安全体系。; 适合人群:信息安全从业人员、网络安全工程师、企业IT管理人员、安全研究人员。; 使用场景及目标:适用于希望深入了解信息安全各细分领域实战操作的专业人士,目标是掌握不同类型安全项目的实施流程与技术要点,提升实际工作中应对安全挑战的能力。; 其他说明:文中提供的项目示例不仅有助于理论学习,更为实际工作提供了具体的指导和参考,帮助相关人员在不同场景下有效开展信息安全工作,确保信息系统的安全性、稳定性和可靠性。
基于matlab实现的博弈方法的电动汽车充电调度策略研究+源码,适合毕业设计、课程设计、项目开发。项目源码已经过严格测试,可以放心参考并在此基础上延申使用 基于matlab实现的博弈方法的电动汽车充电调度策略研究+源码,适合毕业设计、课程设计、项目开发。项目源码已经过严格测试,可以放心参考并在此基础上延申使用~ 基于matlab实现的博弈方法的电动汽车充电调度策略研究+源码,适合毕业设计、课程设计、项目开发。项目源码已经过严格测试,可以放心参考并在此基础上延申使用 基于matlab实现的博弈方法的电动汽车充电调度策略研究+源码,适合毕业设计、课程设计、项目开发。项目源码已经过严格测试,可以放心参考并在此基础上延申使用 基于matlab实现的博弈方法的电动汽车充电调度策略研究+源码,适合毕业设计、课程设计、项目开发。项目源码已经过严格测试,可以放心参考并在此基础上延申使用 基于matlab实现的博弈方法的电动汽车充电调度策略研究+源码,适合毕业设计、课程设计、项目开发。项目源码已经过严格测试,可以放心参考并在此基础上延申使用
内容概要:本文详细介绍了基于Matlab的违规限号车牌识别管理系统的开发过程和技术细节。系统主要分为多个步骤,包括车牌粗定位、灰度化、倾斜矫正、二值化、形态学处理、反色处理、精准定位、字符分割与识别、限号判断、语音播报和违规车牌信息导出。通过这些步骤,系统能够高效地识别并处理违规限号车辆,提升交通管理水平。 适用人群:适用于具有一定编程基础的技术人员,特别是对计算机视觉和数字图像处理感兴趣的开发者。 使用场景及目标:本系统主要用于城市交通管理部门,帮助执法人员快速识别和处理违反限号规定的车辆,提高交通管理的智能化水平。具体应用场景包括但不限于道路监控、停车场管理和临时检查点等。 其他说明:文中提供了大量Matlab代码示例,详细解释了各个步骤的具体实现方法。此外,作者还分享了许多实际开发过程中遇到的问题及其解决方案,有助于读者更好地理解和应用这些技术。
2000-2017年各省国有经济煤气生产和供应业固定资产投资数据 1、时间:2000-2017年 2、来源:国家统计j、能源nj 3、指标:行政区划代码、城市、年份、国有经济煤气生产和供应业固定资产投资 4、范围:31省
HDRI大全三维环境切图
内容概要:本文详细介绍了ADAS(高级驾驶辅助系统)中四个主要功能模块的设计与实现,分别是自适应巡航控制系统(ACC)、前向碰撞预警系统(FCW)、自动紧急制动系统(AEB)和车道保持辅助系统(LKA)。文章不仅展示了各个系统的具体算法实现,如ACC中的PID控制、FCW中的TTC计算、AEB中的状态机设计和LKA中的PD控制器,还分享了许多实际开发中的经验和挑战,如参数调校、传感器融合、时间同步等问题。此外,文中还提到了一些有趣的细节,如在暴雨天气下LKA的表现优化,以及AEB系统在测试过程中遇到的各种corner case。 适合人群:汽车电子工程师、自动驾驶研究人员、嵌入式软件开发者。 使用场景及目标:帮助读者深入了解ADAS系统的工作原理和技术细节,掌握关键算法的实现方法,提高在实际项目中的开发和调试能力。 其他说明:文章通过生动的语言和具体的代码示例,使复杂的理论变得通俗易懂,有助于初学者快速入门并深入理解ADAS系统的开发流程。
# 基于PHP的历史年表聚合网站 ## 项目简介 本项目是一个历史年表的聚合网站,采用PHP编程语言开发。网站包含了众多功能函数,可处理系统信息、错误异常、数字、字符串、时间等,还具备数据库管理、搜索、用户管理等功能,同时拥有日志记录和安全防护模块。 ## 项目的主要特性和功能 1. 系统信息处理能获取系统名称、版本、描述等信息,还可管理令牌。 2. 错误处理具备生成错误消息、错误退出等功能。 3. 数据处理涵盖数字、字符串、时间的处理,如数字转汉字、字符串编码等。 4. 标签管理定义了多种与历史相关的标签信息,包括朝代、事件、人物等。 5. 数据库操作提供数据库管理、SQL查询语句生成、搜索、用户管理等功能。 6. 用户界面生成可生成和更新与时间、标签相关的用户界面元素。 7. 日志记录包含日志保存、格式化、核心记录等功能。 8. 安全防护拥有Web应用防火墙模块,增强网站安全性。 ## 安装使用步骤