
ه¦‚ن½•و£ç،®ن½؟用NIOو¥و„و¶ç½‘络وœچهٹ،ه™¨ن¸€ç›´وک¯وœ€è؟‘و€è€ƒçڑ„ن¸€ن¸ھé—®é¢ک,ن؛ژوک¯ن¹ژهˆ†وگن؛†ن¸€ن¸‹Jettyم€پTomcatه’ŒMinaوœ‰ه…³NIOçڑ„و؛گç پ,هڈ‘çژ°ه¤§ن¼™éƒ½هں؛ن؛ژç±»ن¼¼çڑ„و–¹ه¼ڈ,وˆ‘و„ں觉è؟™ه؛”该算وک¯NIOو„و¶ç½‘络وœچهٹ،ه™¨çڑ„ç»ڈه…¸و¨،ه¼ڈ,ه¹¶هں؛ن؛ژè؟™ç§چو¨،ه¼ڈه†™ن؛†ن¸ھه°ڈه°ڈ网络وœچهٹ،ه™¨ï¼Œهژ‹هٹ›وµ‹è¯•ن؛†ن¸€ن¸‹ï¼Œو•ˆوœè؟کن¸چé”™م€‚ه؛ںè¯ن¸چه¤ڑ说,ه…ˆçœ‹çœ‹ن¸‰è€…وک¯ه¦‚ن½•ن½؟用NIOçڑ„م€‚
Jetty Connectorçڑ„ه®çژ°
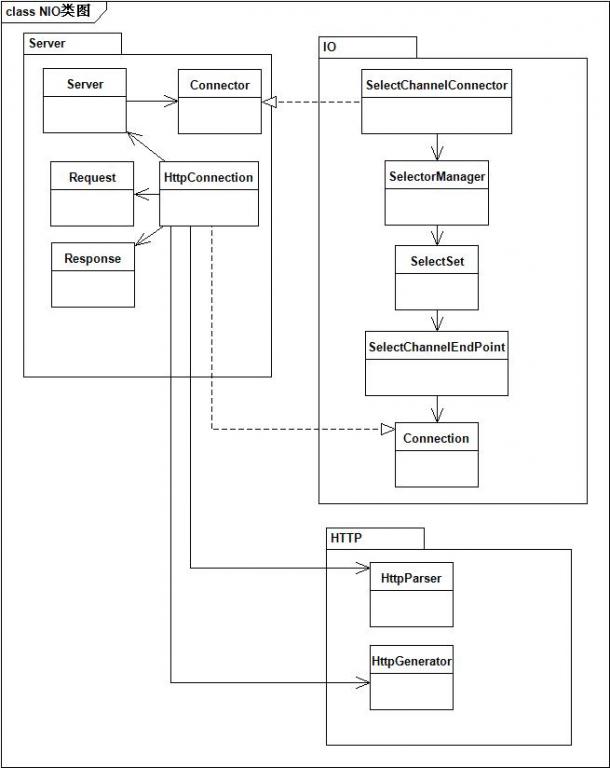
ه…ˆçœ‹çœ‹وœ‰ه…³ç±»ه›¾ï¼ڑ
ه…¶ن¸ï¼ڑ
SelectChannelConnectorè´ں责组装هگ„组ن»¶
SelectSetè´ںè´£ن¾¦هگ¬ه®¢وˆ·ç«¯è¯·و±‚
SelectChannelEndPointè´ںè´£IOçڑ„读ه’Œه†™
HttpConnectionè´ں责逻辑ه¤„çگ†
هœ¨و•´ن¸ھوœچهٹ،端ه¤„çگ†è¯·و±‚çڑ„è؟‡ç¨‹هڈ¯ن»¥هˆ†ن¸؛ن¸‰ن¸ھéک¶و®µï¼Œو—¶ه؛ڈه›¾ه¦‚ن¸‹و‰€ç¤؛ï¼ڑ
éک¶و®µن¸€ï¼ڑ监هگ¬ه¹¶ه»؛ç«‹è؟وژ¥
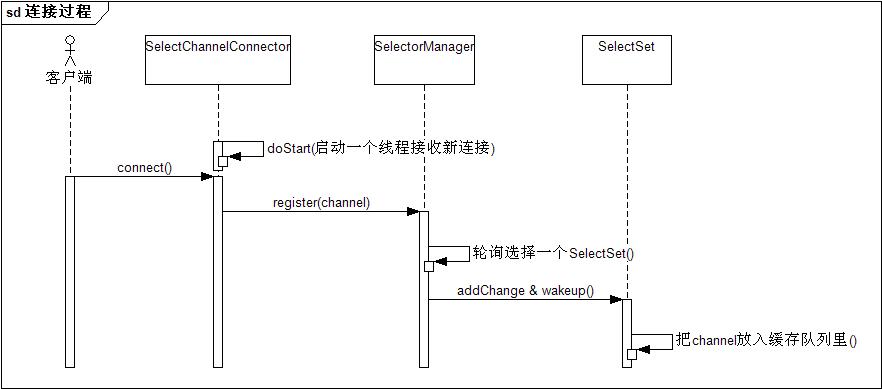
è؟™ن¸€è؟‡ç¨‹ن¸»è¦پوک¯هگ¯هٹ¨ن¸€ن¸ھç؛؟程è´ںè´£acceptو–°è؟وژ¥ï¼Œç›‘هگ¬هˆ°هگژهˆ†é…چ给相ه؛”çڑ„SelectSet,هˆ†é…چçڑ„ç–ç•¥ه°±وک¯è½®è¯¢م€‚
éک¶و®µن؛Œï¼ڑ监هگ¬ه®¢وˆ·ç«¯çڑ„请و±‚
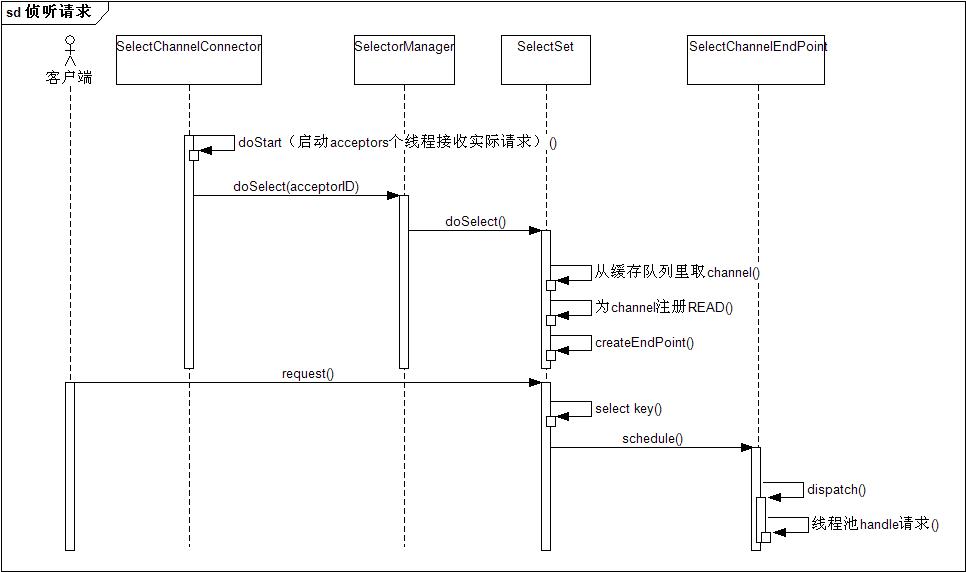
è؟™ن¸€è؟‡ç¨‹ن¸»è¦پوک¯هگ¯هٹ¨ه¤ڑن¸ھç؛؟程(ç؛؟程و•°ن¸€èˆ¬ن¸؛وœچهٹ،ه™¨CPUçڑ„ن¸ھو•°ï¼‰ï¼Œè®©SelectSet监هگ¬و‰€ç®،è¾–çڑ„channeléکںهˆ—,و¯ڈن¸ھSelectSetç»´وٹ¤ن¸€ن¸ھSelector,è؟™ن¸ھSelector监هگ¬éکںهˆ—里و‰€وœ‰çڑ„channel,ن¸€و—¦وœ‰è¯»ن؛‹ن»¶ï¼Œن»ژç؛؟程و± 里و‹؟ç؛؟程هژ»هپڑه¤„çگ†è¯·و±‚
éک¶و®µن¸‰ï¼ڑه¤„çگ†è¯·و±‚
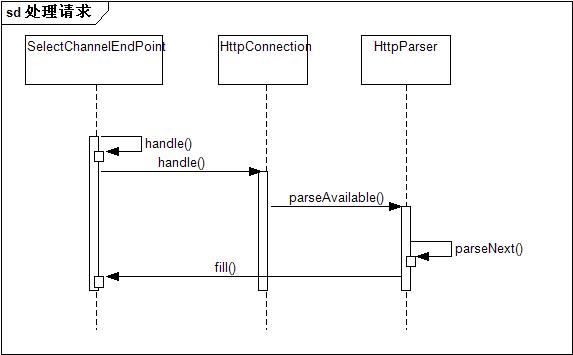
è؟™ن¸€è؟‡ç¨‹ه°±وک¯و¯ڈو¬،ه®¢وˆ·ç«¯è¯·و±‚çڑ„و•°وچ®ه¤„çگ†è؟‡ç¨‹ï¼Œه€¼ه¾—و³¨و„ڈçڑ„وک¯ن¸؛ن؛†ن¸چ让هگژ端çڑ„ن¸ڑهٹ،ه¤„çگ†éک»ç¢چSelector监هگ¬و–°çڑ„请و±‚,ه°±ه¤ڑç؛؟程و¥هˆ†éڑ”ه¼€ç›‘هگ¬è¯·و±‚ه’Œه¤„çگ†è¯·و±‚ن¸¤ن¸ھéک¶و®µم€‚
ç”±و¤هڈ¯ن»¥ه¤§è‡´و€»ç»“ه‡؛Jettyوœ‰ه…³NIOن½؟用çڑ„و¨،ه¼ڈ,ه¦‚ن¸‹ه›¾و‰€ç¤؛ï¼ڑ
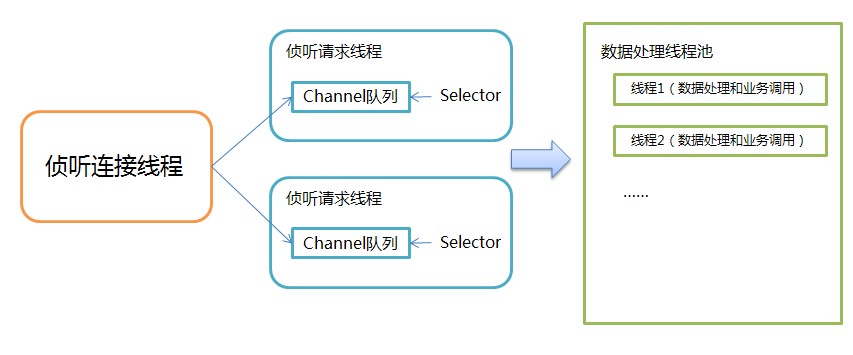
وœ€و ¸ه؟ƒه°±وک¯وٹٹن¸‰ن»¶ن¸چهگŒçڑ„ن؛‹وƒ…éڑ”离ه¼€ï¼Œه¹¶ç”¨ن¸چهگŒè§„و¨،çڑ„ç؛؟程هژ»ه¤„çگ†ï¼Œوœ€ه¤§é™گه؛¦هœ°هˆ©ç”¨NIOçڑ„ه¼‚و¥ه’Œé€ڑçں¥ç‰¹و€§
آ
http://blog.csdn.net/cutesource/article/details/6192016



相ه…³وژ¨èچگ
وœ¬و–‡ه°†ن»ژè؟™ن¸‰ن¸ھو،†و¶ن¸وڈگ炼ه‡؛NIOو„و¶ç½‘络وœچهٹ،ه™¨çڑ„ç»ڈه…¸و¨،ه¼ڈ,ه¹¶é€گن¸€è§£وگه®ƒن»¬çڑ„و ¸ه؟ƒوœ؛هˆ¶م€‚ 首ه…ˆï¼ŒJettyçڑ„NIOه®çژ°ن¸»è¦پç”±ن»¥ن¸‹ه‡ ن¸ھه…³é”®ç»„ن»¶ç»„وˆگï¼ڑ 1. **SelectChannelConnector**ï¼ڑè´ںè´£و•´هگˆهگ„ن¸ھ组ن»¶ï¼Œهˆ›ه»؛ه’Œç®،çگ†è؟وژ¥م€‚ 2....
ه†…ه®¹و¦‚è¦پï¼ڑوœ¬و–‡وژ¢è®¨ن؛†é«کو¯”ن¾‹هڈ¯ه†چç”ں能و؛گوژ¥ه…¥ه¯¹ç”µهٹ›ç³»ç»ںè°ƒه³°èƒ½هٹ›çڑ„ه½±ه“چ,وڈگه‡؛ن؛†ن¸€ç§چهں؛ن؛ژه‡€è´ںèچ·و³¢هٹ¨çڑ„è°ƒه³°وˆگوœ¬é‡ڈهŒ–ن¸ژهˆ†و‘ٹو¨،ه‹م€‚首ه…ˆï¼Œé€ڑè؟‡ه°†è´ںèچ·ه’Œهڈ¯ه†چç”ں能و؛گه‡؛هٹ›و›²ç؛؟转وچ¢ن¸؛و— و³¢هٹ¨çڑ„ه‡ه€¼ç؛؟,و„ه»؛ن؛†و— è°ƒه³°éœ€و±‚çڑ„و›؟ن»£هœ؛و™¯م€‚وژ¥ç€ï¼Œه»؛ç«‹ن؛†هگ«و·±ه؛¦è°ƒه³°ه’Œوٹ½و°´è“„能çڑ„è°ƒه؛¦ن¼کهŒ–و¨،ه‹ï¼Œç”¨ن؛ژè®،ç®—ن¸چهگŒهœ؛و™¯ن¸‹çڑ„è°ƒه³°وˆگوœ¬م€‚é€ڑè؟‡و¯”较وœ‰و— è°ƒه³°éœ€و±‚ن¸¤ç§چهœ؛و™¯ن¸‹çڑ„ç³»ç»ںè°ƒه³°وˆگوœ¬ï¼Œç،®ه®ڑن؛†هچ•ن¸€ن¸»ن½“ه¯¼è‡´çڑ„边际调ه³°وˆگوœ¬ï¼Œه¹¶é‡‡ç”¨Shapleyه€¼و–¹و³•هگˆçگ†هˆ†و‘ٹè°ƒه³°وˆگوœ¬م€‚ç ”ç©¶è،¨وکژ,该و¨،ه‹هڈ¯ن»¥وœ‰و•ˆهڈچوک هگ„ن¸»ن½“çڑ„è°ƒه³°وˆگوœ¬وˆ–è´،献,وœ‰هٹ©ن؛ژن؟ƒè؟›هڈ¯ه†چç”ں能و؛گçڑ„و¶ˆç؛³ه’Œç”µهٹ›ç³»ç»ںçڑ„稳ه®ڑè؟گè،Œم€‚ 适هگˆن؛؛群ï¼ڑن»ژن؛‹ç”µهٹ›ç³»ç»ں规هˆ’م€پè؟گèگ¥ç®،çگ†ه’Œهڈ¯ه†چç”ں能و؛گç ”ç©¶çڑ„ن¸“ن¸ڑن؛؛ه£«ï¼Œن»¥هڈٹه…³و³¨èƒ½و؛گو”؟ç–ه’Œوٹ€وœ¯هڈ‘ه±•çڑ„ç ”ç©¶ن؛؛ه‘کم€‚ ن½؟用هœ؛و™¯هڈٹç›®و ‡ï¼ڑ适用ن؛ژ评ن¼°ه’Œن¼کهŒ–é«کو¯”ن¾‹هڈ¯ه†چç”ں能و؛گوژ¥ه…¥و،ن»¶ن¸‹çڑ„电هٹ›ç³»ç»ںè°ƒه³°وˆگوœ¬ï¼Œو—¨هœ¨وڈگé«ک电هٹ›ç³»ç»ںçڑ„çپµو´»و€§ه’Œç»ڈوµژو€§ï¼ŒهگŒو—¶ن؟ƒè؟›هڈ¯ه†چç”ں能و؛گçڑ„وœ‰و•ˆهˆ©ç”¨م€‚ ه…¶ن»–说وکژï¼ڑ该و¨،ه‹éœ€è¦پو ¹وچ®ه®é™…وƒ…ه†µè؟›è،Œè°ƒو•´ه’Œن¼کهŒ–,ن»¥é€‚ه؛”ن¸چهگŒهœ°هŒ؛çڑ„电هٹ›ه¸‚هœ؛特点ه’Œوٹ€وœ¯و°´ه¹³م€‚
ه†…ه®¹و¦‚è¦پï¼ڑوœ¬و–‡è¯¦ç»†ن»‹ç»چن؛†ه¦‚ن½•ن½؟用هچڑه›¾V16è؟›è،ŒABBوœ؛ه™¨ن؛؛çڑ„ه¤–部هگ¯هٹ¨هڈٹه…¶ن¸ژè¥؟é—¨هگ设ه¤‡çڑ„Profineté€ڑ讯é…چç½®م€‚首ه…ˆو¦‚è؟°ن؛†ABBوœ؛ه™¨ن؛؛ه’Œهچڑه›¾V16çڑ„هں؛وœ¬و¦‚ه؟µï¼Œوژ¥ç€و·±ه…¥è®²è§£ن؛†ه¤–部هگ¯هٹ¨çڑ„é‡چè¦پو€§ه’Œه®çژ°و–¹ه¼ڈ,é‡چ点ن»‹ç»چن؛†FBهٹں能ه—çڑ„ه؛”用,ن»¥هڈٹProfineté€ڑ讯çڑ„ه…·ن½“é…چç½®و¥éھ¤م€‚و–‡ن¸è؟که¼؛è°ƒن؛†GSDو–‡ن»¶çڑ„ن½œç”¨ï¼Œç”¨ن؛ژوڈڈè؟°وœ؛ه™¨ن؛؛çڑ„ه±و€§ه’Œè،Œن¸؛,وœ€هگژ讨è®؛ن؛†ç،¬ن»¶é…چç½®çڑ„è¦پو±‚ه’Œو³¨و„ڈن؛‹é،¹ï¼Œç‰¹هˆ«وک¯ه¯¹dsqc1030وˆ–dsqc652و؟هچ،çڑ„و”¯وŒپه’Œ888-2وˆ–888-3选é،¹çڑ„需و±‚م€‚ 适هگˆن؛؛群ï¼ڑن»ژن؛‹ه·¥ن¸ڑè‡ھهٹ¨هŒ–领هںںçڑ„ه·¥ç¨‹ه¸ˆه’Œوٹ€وœ¯ن؛؛ه‘ک,ه°¤ه…¶وک¯é‚£ن؛›è´ںè´£وœ؛ه™¨ن؛؛集وˆگه’Œç¼–程çڑ„ن¸“ن¸ڑن؛؛ه£«م€‚ ن½؟用هœ؛و™¯هڈٹç›®و ‡ï¼ڑ适用ن؛ژ需è¦په°†ABBوœ؛ه™¨ن؛؛ن¸ژè¥؟é—¨هگ设ه¤‡é€ڑè؟‡Profinet网络è؟›è،Œé€ڑ讯ه¹¶ه®çژ°ه¤–部هگ¯هٹ¨çڑ„é،¹ç›®م€‚ç›®و ‡وک¯وڈگé«کè‡ھهٹ¨هŒ–ç”ںن؛§ç؛؟çڑ„çپµو´»و€§ه’Œو•ˆçژ‡ï¼Œç،®ن؟وœ؛ه™¨ن؛؛ه’ŒPLCن¹‹é—´çڑ„و— ç¼هچڈن½œم€‚ ه…¶ن»–说وکژï¼ڑوœ¬و–‡ن¸چن»…وڈگن¾›ن؛†çگ†è®؛وŒ‡ه¯¼ï¼Œè؟کهŒ…هگ«ن؛†ه®é™…و“چن½œن¸çڑ„ه…³é”®ç»†èٹ‚,وœ‰هٹ©ن؛ژ读者ه؟«é€ںوژŒوڈ،相ه…³وٹ€èƒ½ه¹¶هœ¨ه®è·µن¸ه؛”用م€‚
scratchه°‘ه„؟编程逻辑و€ç»´و¸¸وˆڈو؛گç پ-3Dçژ¯ه¢ƒ.zip
ه°‘ه„؟编程scratché،¹ç›®و؛گن»£ç پو–‡ن»¶و،ˆن¾‹ç´ وگ-و³¼و؛…猫.zip
ه†…ه®¹و¦‚è¦پï¼ڑوœ¬و–‡ن»‹ç»چن؛†هں؛ن؛ژEMD-ARMAçڑ„组هگˆé£ژه…‰ه‡؛هٹ›é¢„وµ‹و–¹و³•ï¼Œè¯¦ç»†éکگè؟°ن؛†ç»ڈéھŒو¨،و€پهˆ†è§£ï¼ˆEMD)ه’Œè‡ھه›ه½’移هٹ¨ه¹³ه‡ï¼ˆARMA)و¨،ه‹çڑ„ه؛”用و¥éھ¤م€‚首ه…ˆï¼Œé€ڑè؟‡EMDه°†هژںه§‹هڈ‘电و•°وچ®هˆ†è§£ن¸؛ه¤ڑن¸ھوœ¬ه¾پو¨،و€په‡½و•°ï¼ˆIMF),然هگژ用ARMAو¨،ه‹ه¯¹هگ„IMFهˆ†é‡ڈè؟›è،Œه»؛و¨،ه’Œé¢„وµ‹ï¼Œوœ€هگژه°†é¢„وµ‹ç»“وœهڈ هٹ é‡چو„,èژ·ه¾—وœ€ç»ˆçڑ„é£ژه…‰هٹںçژ‡é¢„وµ‹ه€¼م€‚و–‡ن¸è؟کوڈگن¾›ن؛†ç®€هŒ–çڑ„Pythonن»£ç پç¤؛ن¾‹ï¼Œه¸®هٹ©è¯»è€…çگ†è§£ه’Œه®çژ°è¯¥و–¹و³•م€‚ 适هگˆن؛؛群ï¼ڑن»ژن؛‹و–°èƒ½و؛گç ”ç©¶ه’Œوٹ€وœ¯ه¼€هڈ‘çڑ„ن¸“ن¸ڑن؛؛ه£«ï¼Œه°¤ه…¶وک¯ه¯¹é£ژه…‰هڈ‘电预وµ‹و„ںه…´è¶£çڑ„ç§‘ç ”ن؛؛ه‘که’Œه·¥ç¨‹ه¸ˆم€‚ ن½؟用هœ؛و™¯هڈٹç›®و ‡ï¼ڑ适用ن؛ژ需è¦پوڈگé«کé£ژه…‰هڈ‘电预وµ‹ç²¾ه؛¦çڑ„é،¹ç›®ï¼Œو—¨هœ¨é€ڑè؟‡ه…ˆè؟›çڑ„و•°ه¦و¨،ه‹ن¼کهŒ–电هٹ›è°ƒه؛¦ه’Œèµ„و؛گé…چç½®م€‚ ه…¶ن»–说وکژï¼ڑوœ¬و–‡وڈگن¾›çڑ„ن»£ç پç¤؛ن¾‹ن»…用ن؛ژو•™ه¦ç›®çڑ„,ه®é™…ه؛”用ن¸éœ€و ¹وچ®ه…·ن½“وƒ…ه†µè°ƒو•´ه’Œه®Œه–„م€‚و¤ه¤–,ه»؛è®®هœ¨ه®è·µن¸هڈ‚考و›´ه¤ڑن¸“ن¸ڑو–‡çŒ®ه’Œه¯»و±‚ن¸“ه®¶و„ڈè§پن»¥ç،®ن؟预وµ‹و¨،ه‹çڑ„ه‡†ç،®و€§ه’Œهڈ¯é و€§م€‚
scratchه°‘ه„؟编程逻辑و€ç»´و¸¸وˆڈو؛گç پ-scratch RPG وˆکو–—.zip
scratchه°‘ه„؟编程逻辑و€ç»´و¸¸وˆڈو؛گç پ-çھ—وˆ·ه†’险.zip
scratchه°‘ه„؟编程逻辑و€ç»´و¸¸وˆڈو؛گç پ-FCç»ڈه…¸و¸¸وˆڈ و²™ç½—و›¼è›‡.zip
ه°‘ه„؟编程scratché،¹ç›®و؛گن»£ç پو–‡ن»¶و،ˆن¾‹ç´ وگ-跑酷版م€ٹوˆ‘çڑ„ن¸–ç•Œم€‹.zip
scratchه°‘ه„؟编程逻辑و€ç»´و¸¸وˆڈو؛گç پ-وٹœهˆ€.zip
ه†…ه®¹و¦‚è¦پï¼ڑوœ¬و–‡ن»‹ç»چن؛†و°¸ç£پهگŒو¥ç”µوœ؛(PMSM)و— ن½چç½®ن¼ و„ںه™¨وژ§هˆ¶çڑ„ن¸€ç§چهˆ›و–°و–¹و³•ï¼Œé‡چ点وژ¢è®¨ن؛†é€ڑè؟‡هڈچ电هٹ¨هٹ؟ن¼°è®،ه’Œو‰°هٹ¨è§‚وµ‹ه™¨ه¢ç›ٹ设è®،و¥ه®çژ°è½¬هگن½چç½®çڑ„ç²¾ç،®ن¼°ç®—م€‚该و–¹و³•éپ؟ه…چن؛†ن¼ ç»ںçڑ„PLLç‰ن½چ置观وµ‹ه™¨ï¼Œن»…需ن¸€و¬،هڈچو£هˆ‡è®،ç®—هچ³هڈ¯èژ·ه¾—转هگن½چ置,وپه¤§ç®€هŒ–ن؛†ç³»ç»ںه¤چو‚ه؛¦م€‚و¤ه¤–,و¨،ه‹وژ§هˆ¶ه™¨é‡‡ç”¨ç¦»و•£هںں设è®،,ن¾؟ن؛ژهڈ‚و•°è°ƒو•´ه’Œé€‚ه؛”ن¸چهگŒç”µوœ؛هڈ‚و•°م€‚و–‡ن¸è؟کوڈگن¾›ن؛†ه…·ن½“çڑ„Pythonن»£ç پç¤؛ن¾‹ï¼Œه±•ç¤؛ن؛†ن»ژهˆه§‹هŒ–电وœ؛هڈ‚و•°هˆ°ن¸»ه¾ھçژ¯وژ§هˆ¶çڑ„ه…·ن½“ه®çژ°و¥éھ¤م€‚ 适هگˆن؛؛群ï¼ڑن»ژن؛‹ç”µوœ؛وژ§هˆ¶ç³»ç»ں设è®،çڑ„ç ”ç©¶ن؛؛ه‘که’Œوٹ€وœ¯ه·¥ç¨‹ه¸ˆï¼Œه°¤ه…¶وک¯ه…³و³¨و°¸ç£پهگŒو¥ç”µوœ؛و— ن¼ و„ںه™¨وژ§هˆ¶é¢†هںںçڑ„ن¸“ن¸ڑن؛؛ه£«م€‚ ن½؟用هœ؛و™¯هڈٹç›®و ‡ï¼ڑ适用ن؛ژ需è¦پ简هŒ–调试وµپ程م€پوڈگé«کç³»ç»ںçپµو´»و€§ه’Œé€‚ه؛”ه¤ڑç§چ电وœ؛هڈ‚و•°çڑ„ه؛”用هœ؛و™¯م€‚ن¸»è¦پç›®و ‡وک¯هœ¨ن؟وŒپé«کو€§èƒ½çڑ„هگŒو—¶é™چن½ژç،¬ن»¶وˆگوœ¬ه’Œç³»ç»ںه¤چو‚و€§م€‚ ه…¶ن»–说وکژï¼ڑ该و–¹و³•ن¸چن»…简هŒ–ن؛†è°ƒè¯•è؟‡ç¨‹ï¼Œè؟کوڈگé«کن؛†ç³»ç»ںçڑ„é²پو£’و€§ه’Œهڈ¯é و€§ï¼Œç‰¹هˆ«é€‚هگˆن؛ژه·¥ن¸ڑè‡ھهٹ¨هŒ–م€پوœ؛ه™¨ن؛؛وٹ€وœ¯ه’Œç”µهٹ¨و±½è½¦ç‰é¢†هںںم€‚
ه†…ه®¹و¦‚è¦پï¼ڑوœ¬و–‡و·±ه…¥وژ¢è®¨ن؛†ن¹ک用车هڈŒè…”هˆ¶هٹ¨ن¸»ç¼¸çڑ„精细هŒ–ه»؛و¨،هڈٹه…¶هœ¨Simulinkه’ŒAmesimن¸çڑ„èپ”هگˆن»؟çœںéھŒè¯پم€‚و–‡ç« 首ه…ˆن»‹ç»چن؛†هڈŒè…”هˆ¶هٹ¨ن¸»ç¼¸çڑ„物çگ†ç»“و„ه’Œهٹ¨هٹ›ه¦و–¹ç¨‹ï¼Œç‰¹هˆ«وک¯è€ƒè™‘ن؛†و¶²هژ‹ç‰¹و€§ه’Œوœ؛و¢°ن¼ هٹ¨çڑ„耦هگˆه…³ç³»م€‚وژ¥ç€ï¼Œن½œè€…详细وڈڈè؟°ن؛†ه¦‚ن½•هœ¨Simulinkن¸ه®çژ°è؟™ن؛›و¨،ه‹ï¼Œه¹¶é€ڑè؟‡Sه‡½و•°ه¤„çگ†هڈکو¥é•؟积هˆ†é—®é¢ک,ç،®ن؟ن»؟çœںç²¾ه؛¦م€‚و¤ه¤–,è؟ک讨è®؛ن؛†èپ”هگˆن»؟çœںè؟‡ç¨‹ن¸éپ‡هˆ°çڑ„و•°وچ®ن؛¤وچ¢é¢‘çژ‡é—®é¢ک,ه¹¶وڈگه‡؛ن؛†ن½؟用ن؛Œéک¶ن؟وŒپه™¨و¥è،¥هپ؟相ن½چو»هگژçڑ„解ه†³و–¹و،ˆم€‚وœ€ç»ˆï¼Œé€ڑè؟‡ه¯¹ن¸چهگŒوژ¨و†هٹ›è¾“ه…¥و،ن»¶ن¸‹çڑ„ن»؟çœں结وœه¯¹و¯”,éھŒè¯پن؛†ç²¾ç»†هŒ–و¨،ه‹çڑ„وœ‰و•ˆو€§ه’Œç¨³ه®ڑو€§م€‚ 适هگˆن؛؛群ï¼ڑن»ژن؛‹و±½è½¦هˆ¶هٹ¨ç³»ç»ںç ”ç©¶çڑ„وٹ€وœ¯ن؛؛ه‘کم€پé«کو ،相ه…³ن¸“ن¸ڑه¸ˆç”ںم€په¯¹è½¦è¾†هٹ¨هٹ›ه¦ن»؟çœںو„ںه…´è¶£çڑ„ه·¥ç¨‹ه¸ˆم€‚ ن½؟用هœ؛و™¯هڈٹç›®و ‡ï¼ڑâ‘ ه¸®هٹ©ç ”究ن؛؛ه‘کو›´ه¥½هœ°çگ†è§£ه’ŒوژŒوڈ،هڈŒè…”هˆ¶هٹ¨ن¸»ç¼¸çڑ„ه·¥ن½œهژںçگ†ï¼›â‘،ن¸؛هگژç»و›´ه¤چو‚çڑ„و•´è½¦هˆ¶هٹ¨ç³»ç»ںن»؟çœںوڈگن¾›هڈ¯é çڑ„هگç³»ç»ںو¨،ه‹ï¼›â‘¢وڈگé«کن»؟çœںç²¾ه؛¦ï¼Œه‡ڈه°‘ه› و¨،ه‹ç®€هŒ–ه¸¦و¥çڑ„误ه·®م€‚ ه…¶ن»–说وکژï¼ڑو–‡ن¸وڈگن¾›ن؛†è¯¦ç»†çڑ„ه»؛و¨،و¥éھ¤م€په…¬ه¼ڈوژ¨ه¯¼م€پن»£ç په®çژ°ن»¥هڈٹن»؟çœں结وœه¯¹و¯”,附ه¸¦ه®Œو•´è§†é¢‘و•™ç¨‹ه’Œهڈ‚考资و–™ï¼Œن¾؟ن؛ژهˆه¦è€…ه¦ن¹ م€‚هگŒو—¶ه¼؛è°ƒن؛†ه®é™…ه؛”用ن¸éœ€è¦پو³¨و„ڈçڑ„ه…³é”®ç»†èٹ‚,ه¦‚وµپé‡ڈè®،ç®—م€پو•°وچ®ن؛¤وچ¢é¢‘çژ‡è°ƒو•´ç‰م€‚
scratchه°‘ه„؟编程逻辑و€ç»´و¸¸وˆڈو؛گç پ-Scratch版Windows11.zip
ه°‘ه„؟编程scratché،¹ç›®و؛گن»£ç پو–‡ن»¶و،ˆن¾‹ç´ وگ-é’è›™.zip
ه†…ه®¹و¦‚è¦پï¼ڑوœ¬و–‡è¯¦ç»†ن»‹ç»چن؛†ه…‰ن¼ڈن؛¤ç›´وµپو··هگˆه¾®ç”µç½‘هœ¨ç¦»ç½‘(ه¤ه²›ï¼‰و¨،ه¼ڈن¸‹çڑ„هڈŒن¸‹ه‚وژ§هˆ¶ن»؟çœںو¨،ه‹م€‚该و¨،ه‹هˆ©ç”¨Matlab/Simulinkه·¥ه…·è؟›è،Œو„ه»؛ه’Œن»؟çœں,و¶µç›–ن؛†ç›´وµپه¾®ç”µç½‘م€پن؛¤وµپه¾®ç”µç½‘ن»¥هڈٹن؛’èپ”هڈکوچ¢ه™¨ï¼ˆILC)çڑ„结و„ه’Œوژ§هˆ¶ç–ç•¥م€‚ç›´وµپه¾®ç”µç½‘采用电هژ‹ç”µوµپهڈŒé—çژ¯ن¸‹ه‚وژ§هˆ¶ï¼Œن؛¤وµپه¾®ç”µç½‘هˆ™é€ڑè؟‡وپ’هژ‹وژ§هˆ¶ه’Œن¸‹ه‚وژ§هˆ¶و¥ç»´وŒپ稳ه®ڑçڑ„频çژ‡ه’Œç”µهژ‹م€‚ILC采用هڈŒن¸‹ه‚وژ§هˆ¶ç–略,é€ڑè؟‡ه½’ن¸€هŒ–ه¤„çگ†ه’Œهپڈه·®è°ƒو•´ï¼Œن½؟ه¾—ن؛¤وµپو¯چç؛؟频çژ‡ه’Œç›´وµپو¯چç؛؟电هژ‹è¶‹ن؛ژن¸€è‡´م€‚و¤ه¤–,و¨،ه‹è؟کهŒ…و‹¬é‡‡و ·ن؟وŒپم€پهگو ‡هڈکوچ¢م€پهٹںçژ‡و»¤و³¢م€پSVPWMç‰è¾…هٹ©çژ¯èٹ‚,ن»¥ç،®ن؟ç³»ç»ںçڑ„稳ه®ڑè؟گè،Œه’Œé«کو•ˆèƒ½é‡ڈç®،çگ†م€‚ه®éھŒç»“وœوک¾ç¤؛,هœ¨è´ںè½½çھپه¢çڑ„وƒ…ه†µن¸‹ï¼Œç³»ç»ںن¾ç„¶èƒ½ه¤ںن؟وŒپ良ه¥½çڑ„و³¢ه½¢è´¨é‡ڈه’Œç¨³ه®ڑو€§م€‚ 适هگˆن؛؛群ï¼ڑه¯¹ه¾®ç”µç½‘وژ§هˆ¶ç³»ç»ںو„ںه…´è¶£çڑ„ç§‘ç ”ن؛؛ه‘کم€پ电هٹ›ه·¥ç¨‹وٹ€وœ¯ن؛؛ه‘کهڈٹé«کو ،ه¸ˆç”ںم€‚ ن½؟用هœ؛و™¯هڈٹç›®و ‡ï¼ڑ适用ن؛ژç ”ç©¶ه’ŒéھŒè¯په…‰ن¼ڈن؛¤ç›´وµپو··هگˆه¾®ç”µç½‘هœ¨ç¦»ç½‘و¨،ه¼ڈن¸‹çڑ„وژ§هˆ¶ç–略,特هˆ«وک¯هڈŒن¸‹ه‚وژ§هˆ¶çڑ„ه؛”用و•ˆوœم€‚ç›®و ‡وک¯وڈگهچ‡ه¾®ç”µç½‘çڑ„稳ه®ڑو€§ه’Œèƒ½é‡ڈç®،çگ†و•ˆçژ‡م€‚ ه…¶ن»–说وکژï¼ڑن»؟çœںçژ¯ه¢ƒن¸؛Matlab2020bهڈٹن»¥ن¸ٹ版وœ¬ï¼Œéƒ¨هˆ†و¨،ه—ن»…و”¯وŒپé«ک版وœ¬è½¯ن»¶م€‚ه¯¹ن؛ژه¸Œوœ›و·±ه…¥ن؛†è§£هڈŒن¸‹ه‚وژ§هˆ¶وœ؛هˆ¶çڑ„ç ”ç©¶è€…ï¼Œهڈ¯ن»¥é€ڑè؟‡è؟›ن¸€و¥çڑ„ه¦ن¹ ه’Œن؛¤وµپèژ·ه¾—و›´ه¤ڑن؟،وپ¯م€‚
ه†…ه®¹و¦‚è¦پï¼ڑوœ¬و–‡è¯¦ç»†ن»‹ç»چن؛†هں؛ن؛ژو‰©ه±•هچ،ه°”و›¼و»¤و³¢ه™¨ï¼ˆEKF)çڑ„INS(وƒ¯و€§وµ‹é‡ڈهچ•ه…ƒï¼‰ه’ŒGPS(ه…¨çگƒه®ڑن½چç³»ç»ں)و¾ç»„هگˆه¯¼èˆھوٹ€وœ¯م€‚首ه…ˆè§£é‡ٹن؛†ن¸؛ن½•éœ€è¦پو¾ç»„هگˆه¯¼èˆھ,هچ³é€ڑè؟‡èچهگˆINSه’ŒGPSçڑ„ن¼کهٹ؟,وڈگé«که®ڑن½چçڑ„稳ه®ڑو€§ه’Œه‡†ç،®و€§م€‚وژ¥ç€éکگè؟°ن؛†15çٹ¶و€پن¸‹çڑ„EKFèچهگˆو–¹و³•ï¼Œو¶µç›–é€ںه؛¦م€په§؟و€پم€پن½چç½®ç‰ه¤ڑن¸ھç³»ç»ںهٹ¨و€پهڈ‚و•°çڑ„ن¼°è®،ن¸ژو›´و–°م€‚然هگژ讨è®؛ن؛†NED(هŒ—ن¸œهœ°ï¼‰هگو ‡ç³»çڑ„ه؛”用هڈٹه…¶ه¸¦و¥çڑ„直观物çگ†و„ڈن¹‰م€‚وœ€هگژوڈگن¾›ن؛†ç®€هŒ–çڑ„Pythonن»£ç پ片و®µï¼Œو¼”ç¤؛ن؛†ه¦‚ن½•هœ¨EKFن¸èچهگˆINSه’ŒGPSو•°وچ®ï¼Œن»¥èژ·ه¾—è؟ç»م€پ稳ه®ڑçڑ„ه¯¼èˆھ结وœم€‚ 适هگˆن؛؛群ï¼ڑن»ژن؛‹ه¯¼èˆھوٹ€وœ¯ç ”هڈ‘çڑ„ن¸“ن¸ڑن؛؛ه£«ï¼Œه°¤ه…¶وک¯ه¯¹EKFم€پINSم€پGPSن»¥هڈٹه¤ڑن¼ و„ںه™¨و•°وچ®èچهگˆو„ںه…´è¶£çڑ„ه·¥ç¨‹ه¸ˆه’Œوٹ€وœ¯ç ”究ن؛؛ه‘کم€‚ ن½؟用هœ؛و™¯هڈٹç›®و ‡ï¼ڑ适用ن؛ژ需è¦پé«کç²¾ه؛¦م€پé«کهڈ¯é و€§ه®ڑن½چç³»ç»ںçڑ„ه؛”用هœ؛و™¯ï¼Œه¦‚è‡ھهٹ¨é©¾é©¶و±½è½¦م€پو— ن؛؛وœ؛é£è،Œوژ§هˆ¶ç³»ç»ںç‰م€‚ç›®و ‡وک¯é€ڑè؟‡èچهگˆINSه’ŒGPSو•°وچ®ï¼Œه…‹وœچهچ•ن¸€ن¼ و„ںه™¨çڑ„ه±€é™گو€§ï¼Œوڈگهچ‡و•´ن¸ھه¯¼èˆھç³»ç»ںçڑ„و€§èƒ½م€‚ ه…¶ن»–说وکژï¼ڑو–‡ن¸وڈگن¾›çڑ„ن»£ç پن»…ن¸؛و¦‚ه؟µéھŒè¯پو€§è´¨ï¼Œه®é™…ه·¥ç¨‹ه؛”用ن¸è؟ک需考虑و›´ه¤ڑه¤چو‚çڑ„ه› ç´ ه’Œن¼کهŒ–وژھو–½م€‚
ه†…ه®¹و¦‚è¦پï¼ڑوœ¬و–‡è¯¦ç»†ن»‹ç»چن؛†هں؛ن؛ژMATLAB Simulinkه¹³هڈ°çڑ„ن¸‰ç›¸é€†هڈکه™¨ç¨³هژ‹وژ§هˆ¶ن»؟çœںو¨،ه‹ï¼Œé‡چ点وژ¢è®¨ن؛†ه¤ه²›è؟گè،Œçژ¯ه¢ƒن¸‹çڑ„电هژ‹ç”µوµپهڈŒé—çژ¯وژ§هˆ¶ç–ç•¥هڈٹه…¶LCLو»¤و³¢ç”µè·¯çڑ„ه؛”用م€‚首ه…ˆï¼Œé€ڑè؟‡ه¯¹ن¸»ç”µè·¯ç”µوµپ电هژ‹çڑ„采و ·ه¹¶è؟›è،ŒParkه’ŒClarkهڈکوچ¢ï¼Œه°†و•°وچ®è½¬وچ¢ن¸؛dqهگو ‡ç³»ن¸‹çڑ„电وµپ电هژ‹ه€¼ï¼Œç„¶هگژ输ه…¥هڈŒé—çژ¯وژ§هˆ¶ç³»ç»ںè؟›è،Œç²¾ç،®è°ƒèٹ‚م€‚وژ¥ç€ï¼Œé€ڑè؟‡هڈچهڈکوچ¢ه›هˆ°abcهگو ‡ç³»ï¼Œه¹¶هˆ©ç”¨PWMè°ƒهˆ¶ه¯¹é€†هڈکه™¨è؟›è،Œوژ§هˆ¶ï¼Œوœ€ç»ˆه®çژ°ن؛†ç”µهژ‹ç”µوµپçڑ„稳ه®ڑ输ه‡؛م€‚و–‡ن¸è؟کوڈگن¾›ن؛†ç®€هŒ–çڑ„Matlabن»£ç پ片و®µï¼Œه±•ç¤؛ن؛†ه…³é”®و¥éھ¤çڑ„ه…·ن½“ه®çژ°و–¹و³•م€‚و¤ه¤–,ن½œè€…é€ڑè؟‡ه¤ڑو¬،ن»؟çœںه®éھŒéھŒè¯پن؛†è¯¥وژ§هˆ¶ç–ç•¥çڑ„وœ‰و•ˆو€§ه’Œé²پو£’و€§م€‚ 适هگˆن؛؛群ï¼ڑن»ژن؛‹ç”µهٹ›ç”µهگم€پè‡ھهٹ¨هŒ–وژ§هˆ¶é¢†هںںçڑ„ç ”ç©¶ن؛؛ه‘که’Œوٹ€وœ¯ن؛؛ه‘ک,ه°¤ه…¶وک¯ه¯¹é€†هڈکه™¨وژ§هˆ¶ç–ç•¥و„ںه…´è¶£çڑ„读者م€‚ ن½؟用هœ؛و™¯هڈٹç›®و ‡ï¼ڑ适用ن؛ژ需è¦پو·±ه…¥ن؛†è§£ن¸‰ç›¸é€†هڈکه™¨هœ¨ه¤ه²›è؟گè،Œçژ¯ه¢ƒن¸‹çڑ„稳هژ‹وژ§هˆ¶وœ؛هˆ¶çڑ„ç ”ç©¶ن؛؛ه‘که’Œوٹ€وœ¯ن؛؛ه‘کم€‚ç›®و ‡وک¯وژŒوڈ،电هژ‹ç”µوµپهڈŒé—çژ¯وژ§هˆ¶ç–ç•¥ن»¥هڈٹLCLو»¤و³¢ç”µè·¯çڑ„设è®،ن¸ژه؛”用,وڈگé«ک逆هڈکه™¨ç³»ç»ںçڑ„稳ه®ڑو€§ه’Œهڈ¯é و€§م€‚ ه…¶ن»–说وکژï¼ڑوœ¬و–‡ن¸چن»…وڈگن¾›ن؛†çگ†è®؛هˆ†وگ,è؟کهŒ…و‹¬ه…·ن½“çڑ„ن»؟çœںو¨،ه‹ه’Œن»£ç پç¤؛ن¾‹ï¼Œوœ‰هٹ©ن؛ژ读者و›´ه¥½هœ°çگ†è§£ه’Œه®è·µç›¸ه…³وٹ€وœ¯م€‚
ه°‘ه„؟编程scratché،¹ç›®و؛گن»£ç پو–‡ن»¶و،ˆن¾‹ç´ وگ-ن¸ƒé¾™çڈ RPG وµ‹è¯•.zip
scratchه°‘ه„؟编程逻辑و€ç»´و¸¸وˆڈو؛گç پ-هںژه¸‚ن¸–ç•Œ.zip