В
дҪңиҖ…пјҡCCP Curt иҜ‘иҖ…пјҡCCP Lion
В
гҖҖгҖҖеӨ§еӨҡж•°зҶҹжӮүEVEзҡ„дәәйғҪзҹҘйҒ“пјҢе®ғжҳҜз”ЁPythonиҜӯиЁҖзј–еҶҷзҡ„пјҢеҰӮжһңиҰҒиҜҙеҫ—жӣҙе…·дҪ“зӮ№пјҢйӮЈе°ұжҳҜStackless PythonгҖӮStacklessжҳҜеңЁPythonеҹәзЎҖдёҠзј–еҶҷзҡ„дёҖеҘ—еҫ®зәҝзЁӢжЎҶжһ¶пјҢе®ғиғҪеңЁдёҚдә§з”ҹеӨ§йҮҸPythonиҮӘиә«йўқеӨ–ејҖй”Җзҡ„жғ…еҶөдёӢеҗҢж—¶е®№зәіж•°зҷҫдёҮжқЎзҡ„зәҝзЁӢгҖӮдҪҶиҜқиҝҳжҳҜиҰҒиҜҙеӣһжқҘпјҢе®ғжҜ•з«ҹиҝҳжҳҜPythonпјҢеӣ жӯӨж‘Ҷи„ұдёҚдәҶвҖңи§ЈйҮҠеҷЁе…ЁеұҖй”ҒвҖқпјҲGlobal Interpreter LockпјҢдёӢж–Үе°Ҷе…¶з®Җз§°дёәGILпјүгҖӮ
гҖҖгҖҖGILжҳҜдёҖдёӘеәҸеҲ—й”ҒпјҢз”ЁжқҘдҝқиҜҒеңЁд»»дҪ•ж—¶еҖҷйғҪеҸӘиғҪжңүдёҖдёӘзәҝзЁӢеҲ©з”ЁPythonи§ЈйҮҠеҷЁпјҲеҢ…жӢ¬е…¶жүҖжңүж•°жҚ®пјүжқҘиҝҗиЎҢиҮӘе·ұгҖӮеӣ жӯӨпјҢе°Ҫз®ЎStackless Pythonж„ҹи§үдёҠеҘҪеғҸе…·еӨҮеӨҡзәҝзЁӢеӨ„зҗҶиғҪеҠӣпјҢдҪҶе®һйҷ…дёҠе®ғиҝҳжҳҜеҚ•зәҝзЁӢзҡ„пјҢеҸӘдёҚиҝҮиҝҗз”ЁдәҶд»»еҠЎеҲҶзҰ»гҖҒйў‘йҒ“гҖҒе®ҡж—¶еҷЁеҸҠе…ұдә«еҶ…еӯҳзӯүдёҖзі»еҲ—жӢӣж•°иҖҢе·ІгҖӮе…¶е®һиҝҮеҺ»жңүдәӣеҚҸдҪңејҸзҡ„еӨҡд»»еҠЎж“ҚдҪңзі»з»ҹд№ҹжҳҜиҝҷж ·е№Ізҡ„пјҢе…¶еҘҪеӨ„жҳҜдҝқиҜҒдәҶжүҖжңүзәҝзЁӢйғҪиғҪиў«жү§иЎҢпјҢдёҚдјҡеҮәзҺ°иў«ж“ҚдҪңзі»з»ҹжҸҗеүҚз»“жқҹиҝҷдёҖжғ…еҶөпјҲйҷӨйқһиў«ж“ҚдҪңзі»з»ҹжҖҖз–‘йқһжі•е®•жңәпјүгҖӮGILзҡ„еӯҳеңЁдҪҝеҫ—зЁӢеәҸе‘ҳеңЁзј–еҶҷжёёжҲҸйҖ»иҫ‘ж—¶иғҪиҮӘдҝЎжҺЁж–ӯеҮәзЁӢеәҸзҡ„е…ЁеұҖзҠ¶жҖҒпјҢзңҒеҺ»дәҶдёҖеӨ§е ҶйҮҮз”ЁејӮжӯҘеӣһи°ғеҮҪж•°зҡ„йә»зғҰгҖӮ
гҖҖгҖҖдҪҶиҝҷж ·жңүдёҖеӨ§зјәзӮ№пјҡз”ұдәҺEVEдёӯжңүйғЁеҲҶжЎҶжһ¶зҡ„д»Јз ҒжҳҜз”ЁPythonзј–еҶҷзҡ„пјҢеӣ жӯӨе®ғ们йғҪе…ҚдёҚдәҶGILйҖ жҲҗзҡ„иҙҹйқўеҪұе“ҚгҖӮжҜ”еҰӮпјҢдёҖж®өз”ЁжқҘиҜ»еҸ–Pythonж•°жҚ®зҡ„C++иҜӯиЁҖд»Јз Ғеҝ…йЎ»еңЁиҺ·еҫ—GILеҗҺжүҚиғҪиҜ»еҸ–дёҖдёӘеӯ—з¬ҰдёІгҖӮ
В
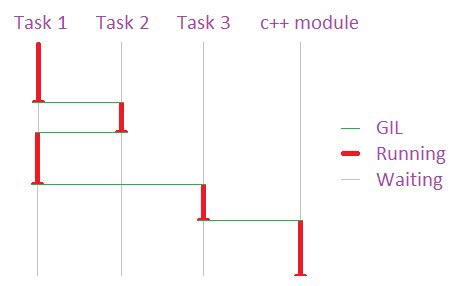
дҪҝз”ЁPythonзҡ„д»»еҠЎйғҪиҰҒиҺ·еҫ—GILжүҚиғҪеҗҲжі•ең°иў«еӨ„зҗҶпјҢиҝҷж ·зӯүеҗҢдәҺPythonд»»еҠЎйғҪжҳҜеҚ•зәҝзЁӢжү§иЎҢгҖӮ
пјҲиҝҷеӣҫз”»еҫ—дёҚеӨӘеҘҪзңӢпјҢдәә家еҸӘжҳҜдёӘзЁӢеәҸе‘ҳпјҢдёҚжҳҜзҫҺжңҜеёҲе“Ұпјү
гҖҖгҖҖдёҖиЁҖд»Ҙи”Ҫд№ӢпјҢStackless Python д»Јз Ғзҡ„иҝҗиЎҢйҖҹеәҰдёҚдјҡй«ҳдәҺдҪ жңҖеҝ«зҡ„йӮЈдёӘCPUж ёеҝғзҡ„йҖҹеәҰгҖӮеңЁдёҖеҸ°4ж ёжҲ–8ж ёCPUзҡ„жңҚеҠЎеҷЁдёҠпјҢе…¶дёӯеҸӘжңүдёҖж ёеңЁи¶…иҙҹиҚ·иҝҗдҪңпјҢе…¶д»–йғҪжІЎжҙҫдёҠз”ЁеңәгҖӮеҪ“然пјҢдёәдәҶи®©иҝҷдәӣCPUж ёеҝғзү©е°Ҫе…¶з”ЁпјҢжҲ‘们еҸҜд»ҘеңЁе®ғ们иә«дёҠеҠ иҪҪжӣҙеӨҡзҡ„иҠӮзӮ№гҖӮеҜ№дәҺEVEдёӯи®ёеӨҡж— зҠ¶жҖҒжҲ–еҜ№е…ұдә«зҠ¶жҖҒдҫқиө–еәҰжһҒдҪҺзҡ„д»Јз ҒиҖҢиЁҖпјҢиҝҷжІЎд»Җд№Ҳй—®йўҳгҖӮдҪҶеҜ№дәҺеғҸеӨӘз©әжЁЎжӢҹжҲ–з©әй—ҙз«ҷиЎҢиө°иҝҷж ·й«ҳеәҰдҫқиө–е…ұдә«зҠ¶жҖҒзҡ„д»Јз ҒиҖҢиЁҖпјҢе°ұжҲҗдәҶдёҖдёӘеӨ§й—®йўҳгҖӮ
гҖҖгҖҖеҒҮи®ҫдёҖдёӘCPUж ёеҝғе°ұиғҪеӨ„зҗҶжүҖжңүзҡ„йҖ»иҫ‘并且еҶҷеҮәжқҘзҡ„Pythonд»Јз Ғиҫғдёәжё…жҷ°пјҢйӮЈжҲ‘д№ӢеүҚиҜҙзҡ„йғҪдёҚжҳҜд»Җд№Ҳй—®йўҳгҖӮдёҚиҝҮпјҢжғіеҝ…жҲ‘дёҚз”ЁиҜҙеӨ§е®¶д№ҹзҹҘйҒ“пјҢе°Ҫз®ЎGridlockзӯүе°Ҹз»„е·Із»ҸеңЁдјҳеҢ–е·ҘдҪңж–№йқўеҒҡеҲ°дәҶе…¶жһҒиҮҙпјҢдҪҶжҲ‘们зҺ°еңЁйқўдёҙзҡ„жғ…еҶөдҫқж—§жҳҜеҚ•дёӘCPUе·Із»Ҹж— жі•еӨ„зҗҶдёҖеңәеӨ§еһӢдјҡжҲҳдәҶгҖӮжңҖиҝ‘дёҠеёӮзҡ„CPUйҖҹеәҰжҳҜжӣҙеҝ«гҖҒзј“еӯҳе®№йҮҸд№ҹжӣҙеӨ§гҖҒжҖ»зәҝд№ҹжӣҙе®Ҫ裕并且具еӨҮжӣҙеҘҪзҡ„жү§иЎҢжөҒж°ҙзәҝпјҢдҪҶеңЁEVEйңҖиҰҒе…¶з»ҷеҠӣзҡ„ең°ж–№пјҢеҚҙжІЎжңүд»»дҪ•иҝӣжӯҘгҖӮиҝ‘жңҹпјҲд№ҹеҸҜиғҪеҢ…жӢ¬дёӯй•ҝжңҹпјүзҡ„и¶ӢеҠҝжҳҜвҖңжЁӘеҗ‘еўһй•ҝвҖқпјҢеҚіеҗҢж—¶иҝҗиЎҢеӨҡдёӘCPUж ёеҝғгҖӮ
гҖҖгҖҖжҖ»дҪ“иҖҢиЁҖпјҢеӨҡж ёCPUзҡ„жөҒиЎҢеҜ№EVEзҡ„й•ҝиҝңеҸ‘еұ•жҳҜдёҖеӨ§еҲ©еҘҪгҖӮжңӘжқҘйӮЈдәӣ30д№ғиҮі60ж ёCPUзҡ„жңәеҷЁиғҪеӨҹеҫҲеҘҪең°дҪ“зҺ°EVEйӣҶзҫӨйғЁзҪІж–№ејҸзҡ„дјҳеҠҝпјҢиҝҷжҳҜеӣ дёәCPUж ёеҝғд№Ӣй—ҙеҲҮжҚўзҡ„ж•ҲзҺҮе°ҶиҝңиҝңеӨ§дәҺзәҝзЁӢд№Ӣй—ҙеҲҮжҚўзҡ„ж•ҲзҺҮгҖӮдҪҶе°ұзӣ®еүҚиҖҢиЁҖпјҢдёәдәҶжҸҗеҚҮжёёжҲҸиҝҗиЎҢйҖҹеәҰпјҢжҲ‘们йңҖиҰҒжҠҠзҪ‘з»ңеҸҠйҖҡз”ЁиҜ»еҶҷиҝҷж ·зҡ„EVEжЁЎеқ—д»ҺGILдёӯи§Јж”ҫеҮәжқҘгҖӮ
еӨҡж ёеҝғгҖҒи¶…ж ҮйҮҸзҡ„硬件еҜ№еҪ“д»Ҡзҡ„зҪ‘з»ңжёёжҲҸжқҘиҜҙпјҢйғҪжҳҜдёӘеҘҪж¶ҲжҒҜгҖӮиҝҷдәӣжёёжҲҸеҫҲйҖӮеҗҲиҝҷз§Қжһ¶жһ„пјҢ并且иғҪеҫҲе®№жҳ“ең°иҝӣиЎҢ并иЎҢеӨ„зҗҶгҖӮеҸҜжғңеҜ№дәҺдҫқиө–Pythonзҡ„EVEжқҘиҜҙпјҢиҝҷе°ұз®—дёҚеҫ—еҘҪж¶ҲжҒҜдәҶгҖӮйӮЈдәӣеҜ№иҝҗиЎҢйҖҹеәҰиҰҒжұӮжһҒй«ҳгҖҒдёҚйңҖиҰҒPythonдҫҝеҲ©ејҖеҸ‘дјҳеҠҝзҡ„EVEзі»з»ҹйңҖиҰҒе°Ҫж—©ж‘Ҷи„ұGILзҡ„жқҹзјҡгҖӮCarbonIOеңЁиҝҷдёӘж–№еҗ‘дёҠеҸҜд»ҘиҜҙжҳҜеҗ‘еүҚиҝҲиҝӣдәҶдёҖеӨ§жӯҘгҖӮ
гҖҖгҖҖCarbonIO жҳҜеңЁStacklessIO еҹәзЎҖдёҠзҡ„дёҖдёӘиҮӘ然жҸҗеҚҮгҖӮе®ғе®һйҷ…дёҠжҳҜдёӘд»ҺеӨҙеҶҷиө·зҡ„е…Ёж–°еј•ж“ҺпјҢзӣ®ж ҮйқһеёёжҳҺзЎ®пјҡи®©зҪ‘з»ңжөҒйҮҸж‘Ҷи„ұGILзҡ„жқҹзјҡпјҢ并且让任дҪ•C++д»Јз Ғд№ҹиғҪиҝҷж ·еҒҡгҖӮеҗҺеҚҠдёӘзӣ®зҡ„жҳҜйҮҚеӨҙжҲҸпјҢжҲ‘们иҠұдәҶеӨ§еҚҠе№ҙжүҚжҠҠе®ғе®ҢжҲҗгҖӮ
гҖҖгҖҖиҝҷйҮҢдёҚеҫ—дёҚе…ҲзЁҚеҫ®жҸҗдёҖдёӢStacklessIOгҖӮеҜ№Stackless Pythonзҡ„зҪ‘з»ңйҖҡдҝЎиҖҢиЁҖпјҢе®ғеҸҜд»ҘиҜҙжҳҜдёӘиҙЁзҡ„йЈһи·ғгҖӮйҖҡиҝҮи®©зҪ‘з»ңж“ҚдҪңеҸҳеҫ—е…·жңүвҖңж— е Ҷж Ҳзҡ„ж„ҸиҜҶвҖқпјҢStacklessIOеҸҜд»Ҙе°ҶдёҖдёӘиў«й”ҒдҪҸзҡ„ж“ҚдҪңиҪ¬з§»еҲ°дёҖдёӘжңӘиў«GILй”ҒдҪҸзҡ„зәҝзЁӢдёҠпјҢиҝҷж ·иҜҘж“ҚдҪңе°ұеҸҜд»Ҙ继з»ӯзӯүеҖҷпјҢиҖҢStacklessеҲҷ继з»ӯеӨ„зҗҶе…¶д»–дәӢеҠЎгҖӮ然еҗҺпјҢиҜҘж“ҚдҪңйҮҚж–°иҺ·еҫ—GILпјҢе‘ҠиҜүStacklessе…¶ж“ҚдҪңе·Іе®ҢжҲҗгҖӮиҝҷж ·пјҢжҺҘ收з«Ҝе°ұеҸҜд»ҘеҗҢжӯҘиҝӣиЎҢпјҢдҪҝеҫ—йҖҡи®ҜйҖҹеәҰеҸҜд»ҘиҫҫеҲ°ж“ҚдҪңзі»з»ҹзә§еҲ«пјҢ并且иғҪеҹәжң¬дёҠеңЁз¬¬дёҖж—¶й—ҙеҶ…еӣһжҠҘз»ҷPythonгҖӮ
В
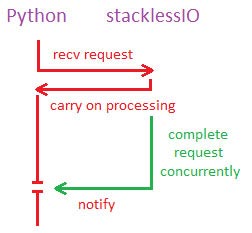
StacklessIOеңЁжІЎжңүGILзҡ„жғ…еҶөдёӢе®ҢжҲҗPythonиҜ·жұӮ
гҖҖгҖҖCarbonIOеңЁжӯӨеҹәзЎҖдёҠжӣҙдёҠдёҖеұӮжҘјгҖӮз”ұдәҺе®ғжҳҜеңЁе®Ңе…Ёи„ұзҰ»дәҺGILзҡ„жғ…еҶөдёӢиҝҗиЎҢеӨҡзәҝзЁӢйҖҡдҝЎеј•ж“ҺпјҢеӣ жӯӨPythonдёҺиҜҘзі»з»ҹд№Ӣй—ҙзҡ„дәӨдә’дҫҝжҳҜе®Ңе…ЁзӢ¬з«ӢдәҶгҖӮжІЎжңүPythonзҡ„иҰҒжұӮпјҢе®ғд№ҹиғҪ收еҸ‘ж•°жҚ®гҖӮ
гҖҖгҖҖиҜ·е…Ғи®ёжҲ‘еҶҚејәи°ғдёҖдёӢпјҡCarbonIOиғҪеңЁPythonдёҚдҪңд»»дҪ•иҰҒжұӮзҡ„жғ…еҶөдёӢ收еҸ‘ж•°жҚ®гҖӮиҝҷжҳҜ并еҸ‘жҖ§зҡ„пјҢдёҚйңҖиҰҒGILгҖӮ
гҖҖгҖҖеҪ“дёҖдёӘиҝһжҺҘйҖҡиҝҮCarbonIOиў«е»әз«ӢеҗҺпјҢзі»з»ҹдјҡи°ғз”ЁWSARecv()ејҖе§ӢжҺҘ收数жҚ®гҖӮдёҺPythonиҝӣзЁӢ并иЎҢзҡ„зәҝзЁӢжұ е°Ҷиҝҷдәӣж•°жҚ®и§ЈеҜҶгҖҒи§ЈеҺӢ缩然еҗҺиҪ¬д№үеҲ°ж•°жҚ®еҢ…йҮҢгҖӮиҝҷдәӣж•°жҚ®еҢ…дјҡжҺ’йҳҹпјҢзӯүзқҖPythonжқҘеӨ„зҗҶгҖӮ
гҖҖгҖҖеҪ“Pythonи§үеҫ—е®ғйңҖиҰҒдёҖдёӘж•°жҚ®еҢ…ж—¶пјҢе®ғдјҡеҫҖдёӢи°ғз”ЁвҖңеҸҜиғҪе·Іе°ҶжӯӨеҢ…еҮҶеӨҮе°ұз»ӘвҖқзҡ„CarbonIOгҖӮиҝҷж„Ҹе‘ізқҖж•°жҚ®еңЁзҰ»ејҖйҳҹеҲ—иў«иҝ”еӣһж•ҙдёӘиҝҮзЁӢдёӯж №жң¬жІЎжңүз”ЁеҲ°GILгҖӮиҝҷжҳҜдёҖдёӘзһ¬ж—¶иҝҮзЁӢпјҢиҮіе°‘д№ҹжңүзәіз§’йӮЈд№Ҳеҝ«гҖӮиҝҷдёӘ并иЎҢиҜ»еҸ–иғҪеҠӣжҳҜCarbonIOзҡ„第дёҖеӨ§еҘҪеӨ„гҖӮ
гҖҖгҖҖ第дәҢеӨ§еҘҪеӨ„дҫҝжҳҜеҸ‘йҖҒдәҶгҖӮж•°жҚ®д»Ҙе…¶еҺҹе§ӢеҪўејҸжҺ’еңЁе·ҘдҪңзәҝзЁӢйҳҹеҲ—йҮҢпјҢ然еҗҺдҫҝзӯүзқҖPythonжқҘи°ғз”ЁдәҶгҖӮе…¶й—ҙзҡ„еҺӢзј©гҖҒеҠ еҜҶгҖҒжү“еҢ…еҸҠWSASend()и°ғз”ЁйғҪжІЎжңүи§ҰеҸҠGILиҖҢеҸ‘з”ҹеңЁеҸҰдёҖдёӘзәҝзЁӢйҮҢпјҢиҝҷж ·ж“ҚдҪңзі»з»ҹдҫҝеҸҜд»Ҙе®үжҺ’е®ғиҝҗиЎҢеңЁеҸҰдёҖйў—CPUдёҠдәҶгҖӮC++д»Јз Ғд№ҹеҸҜд»Ҙи°ғз”ЁдёҖдёӘж–№жі•жқҘиҝҷж ·еҒҡпјҢ并дёҚйңҖиҰҒзү№еҲ«зҡ„жһ¶жһ„еҸҳжӣҙгҖӮStacklessIOд№ҹеҸҜд»ҘйӮЈж ·еҒҡпјҢдҪҶеңЁи„ұзҰ»дёҠиҝ°иғҢжҷҜзҡ„жғ…еҶөдёӢпјҢиҝҷдјҡеҸҳеҫ—еҫҲжІЎж„Ҹд№үгҖӮ
гҖҖгҖҖи®©жҲ‘们еҶҚжқҘеӣһйЎҫдёҖдёӢд№ӢеүҚжҸҗеҲ°зҡ„вҖңе·Іе°ҶжӯӨеҢ…еҮҶеӨҮе°ұз»ӘвҖқгҖӮдҪҶеҰӮжһңжҲ‘们иҰҒе®үзҪ®дёҖдёӘC++еӣһи°ғй’©еӯҗеҮҪж•°пјҢдҪҝеҫ—йқһPythonжЁЎеқ—иғҪеңЁдёҚи§ҰеҸҠMachonetзҡ„жғ…еҶөдёӢиҺ·еҫ—йӮЈдёӘж•°жҚ®пјҢиҝҷеҸҜиЎҢеҗ—пјҹиЎҢе•ҠпјҢиҝҷж—¶жҲ‘们иҰҒз”Ёзҡ„е°ұжҳҜBlueNetдәҶгҖӮ
В
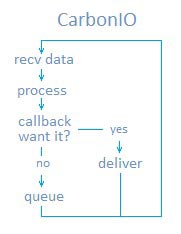
CarbonIOдёҚеҒңең°иҝӣиЎҢж•°жҚ®жҺҘ收пјҢ并且иғҪеңЁж— Pythonд»Ӣе…Ҙзҡ„жғ…еҶөдёӢе‘ҠиҜүC++жЁЎеқ—ж•°жҚ®е·Іж”¶еҲ°гҖӮ
гҖҖгҖҖMachonetжҳҜдёҖдёӘеӨ§еһӢеҠҹиғҪйӣҶеҗҲпјҢе®ғиҙҹиҙЈеҜ№дјҡиҜқиҝӣиЎҢеҲҶжөҒгҖҒеҜјеҗ‘еҸҠз®ЎзҗҶпјҢиҙҹиҙЈеҜ№ж•°жҚ®еҢ…зҡ„ж—¶й—ҙи®ЎеҲ’/еҸ‘йҖҒд»ҘеҸҠе…¶д»–дёҖзі»еҲ—е°ҶEVEж’®еҗҲжҲҗдёҖдёӘжңүжңәж•ҙдҪ“зҡ„еҠҹиғҪгҖӮз”ұдәҺе®ғжҳҜдёӘPythonжЁЎеқ—пјҢеӣ жӯӨжүҖжңүзҡ„ж•°жҚ®иҝҹж—©йғҪеҝ…йЎ»и§ҰеҸҠйӮЈеҖ’йңүзҡ„GILпјҢж— и®әж•°жҚ®еңЁе“ӘдёӘиҠӮзӮ№гҖӮж— и®әдёҖдёӘC++жЁЎеқ—зҡ„йҖҹеәҰжңүеӨҡеҝ«пјҢGILд»Қ然жҳҜдёӘз»•дёҚиҝҮзҡ„瓶йўҲгҖӮиҝҷдҪҝеҫ—жҲ‘们жӣҫз»ҸйғҪдёҚеӨӘж„ҝж„ҸеҒҡеӨ§йҮҸзҡ„C++дјҳеҢ–пјҢеӣ дёәд»»дҪ•дјҳеҢ–еҗҺеҸ–еҫ—зҡ„дјҳеҠҝйғҪдјҡиў«Machonet дёӯзҡ„GILеҗһеҷ¬гҖӮ
гҖҖгҖҖдҪҶзҺ°еңЁжғ…еҶөдёҚдёҖж ·дәҶгҖӮ
гҖҖгҖҖзҺ°еңЁC++зҡ„зі»з»ҹиғҪйҖҡиҝҮBlueNet收еҸ‘ж•°жҚ®еҢ…пјҢж— йңҖеҶҚзҗҶдјҡGILгҖӮиҝҷеҺҹжқҘжҳҜдё“й—ЁдёәдәҶз©әй—ҙз«ҷиЎҢиө°и®ҫи®Ўзҡ„гҖӮз©әй—ҙз«ҷиЎҢиө°еҠҹиғҪйңҖиҰҒеҸ‘йҖҒеӨ§йҮҸзҡ„иЎЁзӨә移еҠЁзҡ„ж•°жҚ®гҖӮEVEдёӯеӨӘз©әйЈһиЎҢзҡ„йӮЈйғЁеҲҶеҠҹиғҪжүҖйңҖиҰҒ收еҸ‘зҡ„ж•°жҚ®пјҢжҲ‘们д»ҘеүҚеҸҜд»Ҙз”Ёж—Ғй—Ёе·ҰйҒ“зҡ„ж–№жі•жқҘи§ЈеҶіпјҢдҪҶеҜ№дәҺеҰӮжӯӨиҝ‘и·қзҰ»зҡ„дәәзү©еҠЁдҪңпјҢе°ұдёҚиЎҢдәҶгҖӮд№ӢеүҚжҲ‘们еҒҡзҡ„йў„жөӢжҳҫзӨәпјҢеҚідҪҝжҠҠз©әй—ҙз«ҷиЎҢиө°еҸ‘йҖҒж•°жҚ®зҡ„йў‘зҺҮжҺ§еҲ¶еңЁдёҖиҲ¬зЁӢеәҰпјҢиҜҘеҠҹиғҪд№ҹдјҡжҠҠж•ҙдёӘжңҚеҠЎеҷЁйӣҶзҫӨжӢ–еһ®гҖӮйҖҡиҝҮеңЁжІЎжңүGILе№Іжү°зҡ„жғ…еҶөдёӢеҜ№жөҒе…Ҙ/жөҒеҮәC++еҺҹз”ҹзі»з»ҹпјҲжҜ”еҰӮзү©зҗҶзі»з»ҹпјүзҡ„ж•°жҚ®иҝӣиЎҢеҲҶжөҒпјҢBlueNetжҲҗеҠҹең°и§ЈеҶідәҶиҜҘй—®йўҳгҖӮз”ұдәҺеңЁиҝҷз§Қжғ…еҶөдёӢпјҢж•°жҚ®иҝҳжҳҜдҝқжҢҒзқҖе…¶еҺҹз”ҹжҖҒпјҢеӣ жӯӨж•ҙдёӘзі»з»ҹиҝҗиЎҢзҡ„йҖҹеәҰе°ұжҜ”д№ӢеүҚжҸҗй«ҳдәҶгҖӮ
гҖҖгҖҖиҝҷдёӘе…·дҪ“жҳҜжҖҺд№ҲиҝҗдҪңзҡ„е‘ўпјҹBlueNetдҝқеӯҳзқҖдёҖд»ҪжүҖжңүеҝ…иҰҒMachonetз»“жһ„зҡ„еҸӘиҜ»жӢ·иҙқпјҢеҸҰеӨ–пјҢжүҖжңүзҡ„ж•°жҚ®еҢ…еүҚйғҪдјҡйҷ„дёҠеҫҲе°Ҹзҡ„дёҖж®өпјҲ8еҲ°10дёӘеӯ—иҠӮзҡ„пјүж•°жҚ®еӨҙгҖӮиҝҷдёӘж•°жҚ®еӨҙйҮҢеҗ«жңүи·Ҝеҫ„дҝЎжҒҜгҖӮеҪ“BlueNetжҺҘеҲ°дёҖдёӘж•°жҚ®еҢ…ж—¶пјҢе®ғдјҡеҜ№е…¶иҝӣиЎҢжЈҖжөӢпјҢ然еҗҺеҗҲзҗҶең°еҶҚеҲҶеҸ‘пјҡиҰҒд№ҲиҪ¬еҸ‘еҲ°еҸҰдёҖдёӘиҠӮзӮ№дёҠпјҢиҰҒд№ҲдәӨз»ҷиў«жң¬ең°зҡ„е·ІжіЁеҶҢзҡ„C++еә”з”ЁзЁӢеәҸгҖӮеҰӮжһңе®ғиҪ¬еҸ‘пјҢйӮЈиҝҷдёӘиҝҮзЁӢдёӯе°Ҷз”ЁдёҚеҲ°GILпјҢж №жң¬дёҚдјҡи°ғз”ЁMachonet/PythonгҖӮиҝҷж„Ҹе‘ізқҖжҲ‘们зҡ„д»ЈзҗҶжңҚеҠЎеҷЁе®Ңе…ЁиғҪд»Ҙ并иЎҢж–№ејҸеҜ№BlueNetзҡ„ж•°жҚ®еҢ…иҝӣиЎҢеҲҶжөҒпјҢиҖҢдёҚеҝ…еҺ»з»ҸиҝҮPythonеҜјиҮҙйўқеӨ–ејҖй”Җзҡ„дә§з”ҹгҖӮйӮЈиҝҷж•ҲзҺҮ究з«ҹжҸҗй«ҳдәҶеӨҡе°‘е‘ўпјҹжҲ‘们иҝҳж— жі•зЎ®е®ҡпјҢдҪҶеңЁйҷҚдҪҺжңәеҷЁиҙҹиҪҪеҸҠ延иҝҹж–№йқўпјҢе®ғиҝҳжҳҜйқһеёёйқһеёёжҳҺжҳҫзҡ„гҖӮе®һйҷ…дёҠжҲ‘们иҝҳдёҚиғҪе°Ҷж•°жҚ®е…¬ејҖпјҢеӣ дёәе®ғ们еҘҪеҫ—йҡҫд»ҘзҪ®дҝЎгҖӮ
гҖҖгҖҖйҷӨжӯӨд№ӢеӨ–пјҢCarbonIOд№ҹеҢ…еҗ«дәҶеӨ§йҮҸеә•еұӮдјҳеҢ–пјҢз»қеӨ§еӨҡж•°йғҪжҳҜе°Ҹ规模зҡ„йҖҹеәҰжҸҗеҚҮпјҢдҪҶжҠҠиҝҷдәӣз»ҹз»ҹеҸ еҠ иө·жқҘпјҢж•ҙдёӘзі»з»ҹзҡ„иҝҗиЎҢйҖҹеәҰд№ҹе°ұжңүдәҶжҳҫи‘—жҸҗй«ҳгҖӮд»ҘдёӢеҮ зӮ№еҖјеҫ—дёҖжҸҗпјҡ
е·ҘдҪңеҲҶз»„
гҖҖгҖҖиҷҪ然жҲ‘еҫҲйҡҫеңЁжң¬ж–ҮдёӯжҠҠиҝҷдәӢе„ҝиҜҙеҫ—еӨӘз»ҶпјҢдҪҶCarbonIOйқһеёёеҮәиүІең°е°Ҷе·ҘдҪңеҲҶз»„жқҘеӨ„зҗҶгҖӮз®ҖиҖҢиЁҖд№ӢпјҢе°ұжҳҜжҹҗдәӣж“ҚдҪңжңүдәҶдёҖдёӘеӣәе®ҡзҡ„ејҖй”ҖгҖӮзҪ‘з»ңеј•ж“Һжңүи®ёеӨҡиҝҷж ·зҡ„ејҖй”ҖпјҢдҪҶе…¶д»–жүҖжңүе…·жңүйҮҚиҰҒж„Ҹд№үзҡ„д»Јз Ғд№ҹжңүеӨ§йҮҸејҖй”ҖгҖӮйҖҡиҝҮдёҖдәӣеҲ«еҮәеҝғиЈҒзҡ„жҠҖе·§пјҢжҲ‘们жҳҜеҸҜд»Ҙе°Ҷи®ёеӨҡиҝҷж ·зҡ„е·ҘдҪңеҗҲ并еңЁдёҖиө·пјҢиҝҷж ·е°ұеҸӘдә§з”ҹдёҖж¬ЎејҖй”ҖгҖӮе°ұеғҸжҠҠйҖ»иҫ‘ж•°жҚ®еҢ…йғҪз»„еҗҲеңЁдёҖиө·еҸ‘йҖҒеңЁдёҖдёӘTCP/IP MTUйҮҢдёҖж ·пјҲEVEдёҖзӣҙе°ұжҳҜиҝҷж ·е№Ізҡ„пјүпјҢCarbonIOе°ҶиҝҷдёҖеҒҡжі•иҝӣдёҖжӯҘж·ұеҢ–гҖӮдёҖдёӘжҜ”иҫғз®ҖеҚ•зҡ„дҫӢеӯҗе°ұжҳҜGILиҺ·еҸ–йӣҶеҗҲгҖӮ
гҖҖгҖҖ第дёҖдёӘиҰҒе°қиҜ•еҸ–еҫ—GILзҡ„зәҝзЁӢдјҡе…Ҳе»әз«Ӣиө·дёҖдёӘйҳҹеҲ—пјҢиҝҷж ·е…¶д»–иҰҒиҺ·еҸ–GILзҡ„зәҝзЁӢеҸӘйңҖе°ҶиҮӘе·ұзҡ„е”ӨйҶ’и°ғз”ЁжҺ’еңЁйҳҹеҲ—жң«е°ҫ然еҗҺиҝ”еӣһзәҝзЁӢжұ е°ұиЎҢгҖӮйӮЈGILжңҖеҗҺиў«еҸ–еҫ—ж—¶пјҢ第дёҖдёӘзәҝзЁӢдјҡеҗёе№Іж•ҙдёӘйҳҹеҲ—пјҢдёҚеҝ…еңЁжҜҸж¬ЎIOе”ӨйҶ’ж—¶йҮҠж”ҫ/йҮҚжӢҫGILгҖӮеңЁдёҖдёӘз№Ғеҝҷзҡ„жңҚеҠЎеҷЁдёҠиҝҷз§Қжғ…еҶөеҫҲеӨҡпјҢеӣ жӯӨиҝҷз§Қж”№иҝӣеҜ№жҲ‘们жқҘиҜҙжҳҜдёҖеӨ§еҲ©еҘҪгҖӮ
openSSL ж•ҙеҗҲ
гҖҖгҖҖCarbonIOз”ЁopenSSLжқҘе®һзҺ°SSLпјҢ并且иғҪеңЁдёҚй”Ғе®ҡGILзҡ„жғ…еҶөдёӢдёҺиҜҘеҚҸи®®ж•°жҚ®йҖҡдҝЎгҖӮиҜҘеә“еҸӘжҳҜз”ЁдҪңдёҖдёӘBIOеҜ№иҖҢе·ІпјҢжүҖжңүзҡ„ж•°жҚ®еҜјиҲӘиҝҳжҳҜз”ұCarbonIOйҖҡиҝҮе®ҢжҲҗз«ҜеҸЈиҝӣиЎҢзҡ„гҖӮиҝҷжңүеҠ©дәҺжҲ‘们еҫӘеәҸжёҗиҝӣең°и®©EVEеҸҳеҫ—жӣҙе®үе…ЁпјҢз”ҡиҮіе°ҶжқҘеҸҜд»ҘжҠҠе®ҳж–№зҪ‘з«ҷдёҠзҡ„жҹҗдәӣеёҗеҸ·з®ЎзҗҶеҠҹиғҪжҢӘеҲ°EVEе®ўжҲ·з«ҜдёҠеҺ»пјҢиҝҷж ·еҸҜд»Ҙжӣҙж–№дҫҝеӨ§е®¶гҖӮ
еҺӢзј©ж•ҙеҗҲ
гҖҖгҖҖCarbonIOиғҪеҲ©з”ЁzlibжҲ–snappyеҜ№жҜҸдёҖдёӘж•°жҚ®еҢ…йғҪиҝӣиЎҢеҺӢзј©/и§ЈеҺӢзј©пјҢиҝҷдёҖиҝҮзЁӢеҗҢж ·жҳҜж— йңҖGILзҡ„гҖӮ
е®һжҲҳжЈҖйӘҢ
гҖҖгҖҖйҖҡиҝҮеҜ№дёҖдёӘз№Ғеҝҷзҡ„д»ЈзҗҶжңҚеҠЎеҷЁпјҲдәәж•°еі°еҖјеӨ§зәҰ1600дәәпјҢдёҖдёӘе№іеёёе·ҘдҪңж—Ҙпјүзҡ„24е°Ҹж—¶ж•°жҚ®зҡ„收йӣҶпјҢжҲ‘们еҸ‘зҺ°CPUзҡ„жҖ»дҪ“дҪҝз”ЁзҺҮдёҺеҚ•дёӘз”ЁжҲ·зҡ„CPUдҪҝз”ЁзҺҮйғҪеҮәзҺ°дәҶеӨ§е№…дёӢйҷҚгҖӮиҝҷйғҪеҪ’еҠҹдәҺCarbonIOзҡ„жҖ»дҪ“жһ¶жһ„пјҢе…¶дҪңз”Ёе°ұжҳҜйҷҚдҪҺдәӢеҠЎзҡ„ејҖй”ҖгҖӮеҪ“жңҚеҠЎеҷЁеҸҳеҫ—з№Ғеҝҷд№ӢеҗҺпјҢиҝҷдәӣдјҳеҢ–зҡ„ж•Ҳжһңдјҡиў«йҖҗжёҗеўһеӨҡдё”еҝ…йЎ»еӨ„зҗҶзҡ„дәӢеҠЎжүҖжҠөж¶ҲпјҢдҪҶеңЁжңҖй«ҳиҙҹиҪҪж—¶пјҢCarbonIOиҝҳжҳҜи®©жҲ‘们зҡ„жёёжҲҸеўһйҖҹдәҶдёҚе°‘гҖӮ
В

В
В
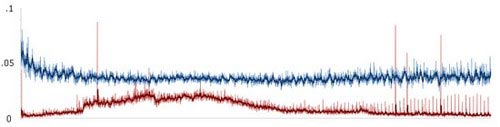
д»ҘдёҠдёә24е°Ҹж—¶еҶ…еҚ•дёӘз”ЁжҲ·зҡ„CPUдҪҝз”ЁзҺҮ
В
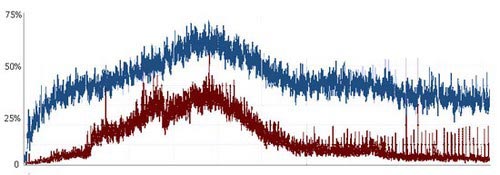
д»ҘдёҠдёәеҗҢж ·зҡ„24е°Ҹж—¶еҶ…жҖ»дҪ“CPUдҪҝз”ЁзҺҮ
гҖҖгҖҖиҮідәҺSOLпјҲжҳҹзі»пјүиҠӮзӮ№пјҢз”ұдәҺе®ғ们зҡ„дё»иҰҒиҒҢиҙЈжҳҜжёёжҲҸжңәеҲ¶иҖҢйқһзҪ‘з»ңз®ЎзҗҶпјҢеӣ жӯӨе®ғ们д»ҺиҜҘдјҳеҢ–дёӯиҺ·еҫ—зҡ„дјҳеҠҝ并дёҚйӮЈд№ҲжҳҺжҳҫпјҢдҪҶжҲ‘们иҝҳжҳҜзңӢеҲ°е®ғ们зҡ„CPUдҪҝз”ЁзҺҮдёӢйҷҚдәҶ8%-10%гҖӮ
гҖҖгҖҖйңҖиҰҒжҢҮеҮәзҡ„жҳҜпјҢеңЁдёҠиҝ°зҡ„жЈҖйӘҢдёӯжҲ‘们没жңүиҝҗз”ЁBlueNetпјҢжІЎжңүз”ЁCarbonIOзҡ„ж•°жҚ®еҜјиҲӘпјҢд№ҹжІЎжңүз”Ёи„ұзҰ»GILзҡ„ж•°жҚ®еҺӢзј©/и§ЈеҺӢзј©гҖӮ
жҖ»з»“
гҖҖгҖҖжҖ»зҡ„жқҘиҜҙпјҢжҜ”иө·д»ҘеүҚпјҢEVEиғҪжӣҙеҘҪең°еҲ©з”ЁзҺ°д»ЈжңҚеҠЎеҷЁзЎ¬д»¶еёҰжқҘзҡ„дјҳеҠҝпјҢиғҪи®©е®ғеңЁеҗҢж ·зҡ„ж—¶й—ҙеҶ…е®ҢжҲҗжӣҙеӨҡзҡ„е·ҘдҪңпјҢиҝҷж ·е°ұй—ҙжҺҘжҸҗеҚҮдәҶдёҖдёӘзі»з»ҹжүҖиғҪиҝӣиЎҢзҡ„ж“ҚдҪңдёҠйҷҗгҖӮйҖҡиҝҮе°ҶжҲ‘们зҡ„д»Јз Ғе°ҪйҮҸдёҺGILи„ұзҰ»пјҢжҲ‘们еҸҚиҖҢдёәйӮЈдәӣзңҹжӯЈйңҖиҰҒз”Ёе®ғзҡ„д»Јз Ғи…ҫеҮәдәҶз©әй—ҙгҖӮеҸҰеӨ–пјҢз”ұдәҺдёҚеҶҚжңүйӮЈд№ҲеӨҡд»Јз ҒйңҖиҰҒз«һзӣёиҺ·еҸ–GILпјҢзі»з»ҹзҡ„жҖ»дҪ“иҝҗиЎҢж•ҲзҺҮд№ҹдјҡжҸҗеҚҮгҖӮжңүдәҶBlueNetеҶҚеҠ дёҠеҫҲеҘҪзҡ„д»Јз ҒдјҳеҢ–пјҢжҸҗйҖҹз©әй—ҙе·Іиў«жү“ејҖгҖӮиҷҪ然жңҖеҗҺзҡ„з»“жһңд»Қжңүеҫ…е®һи·өжЈҖйӘҢпјҢдҪҶиҮіе°‘пјҢжҲ‘们已з»Ҹж¶ҲйҷӨдәҶдёҖеӨ§з“¶йўҲгҖӮ
В
В
еҺҹж–Үhttp://community.eveonline.com/devblog.asp?a=blog&nbid=2332В
В
еҲҶдә«еҲ°пјҡ





зӣёе…іжҺЁиҚҗ
зЁіеҺӢзҪҗsw16_дёүз»ҙ3Dи®ҫи®Ўеӣҫзәё_еҢ…жӢ¬йӣ¶д»¶еӣҫ_жңәжў°3DеӣҫеҸҜдҝ®ж”№жү“еҢ…дёӢиҪҪ_дёүз»ҙ3Dи®ҫи®Ўеӣҫзәё_еҢ…жӢ¬йӣ¶д»¶еӣҫ_жңәжў°3DеӣҫеҸҜдҝ®ж”№жү“еҢ…дёӢиҪҪ.zip
еҶ…е®№жҰӮиҰҒпјҡжң¬ж–ҮиҜҰз»Ҷд»Ӣз»ҚдәҶеҲ©з”ЁйҖ’жҺЁжңҖе°ҸдәҢд№ҳжі•пјҲRLSпјүиҝӣиЎҢж°ёзЈҒеҗҢжӯҘз”өжңәеҸӮж•°иҫЁиҜҶзҡ„ж–№жі•еҸҠе…¶MATLABд»ҝзңҹиҝҮзЁӢгҖӮйҰ–е…Ҳи§ЈйҮҠдәҶRLSз®—жі•зҡ„дјҳеҠҝпјҢеҰӮдёҚйңҖиҰҒжҰӮзҺҮжЁЎеһӢгҖҒи®Ўз®—йҮҸйҖӮдёӯд»ҘеҸҠйҖӮз”ЁдәҺеөҢе…ҘејҸзі»з»ҹзҡ„е®һж—¶еҸӮж•°жӣҙж–°гҖӮжҺҘзқҖеұ•зӨәдәҶе°Ҷз”өжңәз”өеҺӢж–№зЁӢиҪ¬жҚўдёәж ҮеҮҶеҪўејҸY=ПҶОёзҡ„е…·дҪ“жӯҘйӘӨпјҢ并жҸҗдҫӣдәҶж ёеҝғзҡ„RLSиҝӯд»Јд»Јз ҒгҖӮж–Үдёӯиҝҳи®Ёи®әдәҶд»ҝзңҹиҝҮзЁӢдёӯзҡ„дёҖдәӣе…ій”®жҠҖжңҜз»ҶиҠӮпјҢеҰӮйҒ—еҝҳеӣ еӯҗзҡ„йҖүжӢ©гҖҒеҚҸж–№е·®зҹ©йҳөзҡ„еҲқе§ӢеҢ–е’Ңжӣҙж–°ж–№ејҸгҖҒз”өжөҒдҝЎеҸ·зҡ„еӨ„зҗҶж–№жі•зӯүгҖӮжңҖз»Ҳз»ҷеҮәдәҶд»ҝзңҹз»“жһңпјҢжҳҫзӨәз”өйҳ»е’Ңз”өж„ҹзҡ„иҫЁиҜҶиҜҜе·®еҲҶеҲ«иҫҫеҲ°дәҶ0.08%е’Ң0.12%пјҢ并жҢҮеҮәдәҶе®һйҷ…еә”з”ЁдёӯйңҖиҰҒжіЁж„Ҹзҡ„ж•°жҚ®еҗҢжӯҘе’Ңж•°еҖјзЁіе®ҡжҖ§й—®йўҳгҖӮ йҖӮеҗҲдәәзҫӨпјҡд»ҺдәӢз”өжңәжҺ§еҲ¶з ”究зҡ„жҠҖжңҜдәәе‘ҳгҖҒз ”з©¶з”ҹеҸҠд»ҘдёҠеӯҰеҺҶзҡ„еӯҰз”ҹгҖӮ дҪҝз”ЁеңәжҷҜеҸҠзӣ®ж Үпјҡв‘ её®еҠ©з ”究дәәе‘ҳзҗҶи§Је’ҢжҺҢжҸЎRLSз®—жі•еңЁз”өжңәеҸӮж•°иҫЁиҜҶдёӯзҡ„еә”з”Ёпјӣв‘ЎжҸҗдҫӣиҜҰз»Ҷзҡ„д»ҝзңҹд»Јз Ғе’Ңй…ҚзҪ®е»әи®®пјҢдҫҝдәҺеҝ«йҖҹжҗӯе»әе®һйӘҢзҺҜеўғпјӣв‘ўжҢҮеҜјеҰӮдҪ•дјҳеҢ–з®—жі•жҖ§иғҪпјҢжҸҗй«ҳеҸӮж•°иҫЁиҜҶзІҫеәҰгҖӮ е…¶д»–иҜҙжҳҺпјҡжң¬ж–ҮдёҚд»…ж¶өзӣ–дәҶзҗҶи®әжҺЁеҜјпјҢиҝҳеҢ…жӢ¬дәҶеӨ§йҮҸзҡ„е®һи·өз»ҸйӘҢеҲҶдә«е’ҢжҠҖжңҜз»ҶиҠӮжҺўи®ЁпјҢжңүеҠ©дәҺиҜ»иҖ…е…ЁйқўзҗҶи§ЈRLSз®—жі•зҡ„е®һйҷ…еә”з”ЁгҖӮеҗҢж—¶пјҢж–ҮдёӯжҸҗеҲ°зҡ„д»ҝзңҹж–№жЎҲеҸҜд»Ҙж–№дҫҝең°з§»жӨҚеҲ°DSPе№іеҸ°пјҢиҝӣдёҖжӯҘжү©еұ•дәҶе…¶е®һз”Ёд»·еҖјгҖӮ
йӣ¶иө·зӮ№PythonеӨ§ж•°жҚ®дёҺйҮҸеҢ–дәӨжҳ“
з®ЎйҒ“жё…жұЎжңәеҷЁдәәsw16еҸҜзј–иҫ‘_дёүз»ҙ3Dи®ҫи®Ўеӣҫзәё_еҢ…жӢ¬йӣ¶д»¶еӣҫ_жңәжў°3DеӣҫеҸҜдҝ®ж”№жү“еҢ…дёӢиҪҪ_дёүз»ҙ3Dи®ҫи®Ўеӣҫзәё_еҢ…жӢ¬йӣ¶д»¶еӣҫ_жңәжў°3DеӣҫеҸҜдҝ®ж”№жү“еҢ…дёӢиҪҪ.zip
з”өеӯҗд»ҝзңҹж•ҷзЁӢпјҢд»ҺеҹәзЎҖеҲ°зІҫйҖҡпјҢжҜҸдёӘеҺӢзј©еҢ…15зҜҮж•ҷзЁӢпјҢжҜҸзҜҮж•ҷзЁӢ5000еӯ—д»ҘдёҠгҖӮ
з”өеӯҗд»ҝзңҹж•ҷзЁӢпјҢд»ҺеҹәзЎҖеҲ°зІҫйҖҡпјҢжҜҸдёӘеҺӢзј©еҢ…15зҜҮж•ҷзЁӢпјҢжҜҸзҜҮж•ҷзЁӢ5000еӯ—д»ҘдёҠгҖӮ
1гҖҒж–Ү件иҜҙжҳҺпјҡ Centos8ж“ҚдҪңзі»з»ҹthai-scalable-garuda-fonts-0.6.5-1.el8.rpmд»ҘеҸҠзӣёе…ідҫқиө–пјҢе…Ёжү“еҢ…дёәдёҖдёӘtar.gzеҺӢзј©еҢ… 2гҖҒе®үиЈ…жҢҮд»Өпјҡ #Step1гҖҒи§ЈеҺӢ tar -zxvf thai-scalable-garuda-fonts-0.6.5-1.el8.tar.gz #Step2гҖҒиҝӣе…Ҙи§ЈеҺӢеҗҺзҡ„зӣ®еҪ•пјҢжү§иЎҢе®үиЈ… sudo rpm -ivh *.rpm
еҶ…е®№жҰӮиҰҒпјҡжң¬ж–ҮиҜҰз»Ҷд»Ӣз»ҚдәҶеҲ©з”ЁABAQUSиҝӣиЎҢж»‘еқЎе’ҢжІүйҷҚеҜ№еҹӢең°з®ЎйҒ“еҪұе“Қзҡ„жңүйҷҗе…ғеҲҶжһҗж–№жі•гҖӮдё»иҰҒеҶ…е®№ж¶өзӣ–дәҶеҮ дҪ•е»әжЁЎгҖҒжқҗж–ҷеұһжҖ§е®ҡд№үгҖҒжҺҘи§Ұи®ҫзҪ®гҖҒиҫ№з•ҢжқЎд»¶дёҺеҠ иҪҪзӯүж–№йқўзҡ„жҠҖжңҜз»ҶиҠӮгҖӮйҖҡиҝҮе…·дҪ“зҡ„Pythonи„ҡжң¬зӨәдҫӢеұ•зӨәдәҶеҰӮдҪ•жһ„е»әжЁЎеһӢпјҢ并ж·ұе…ҘжҺўи®ЁдәҶж»‘еқЎе’ҢжІүйҷҚжқЎд»¶дёӢз®ЎйҒ“зҡ„еә”еҠӣгҖҒеә”еҸҳеҲҶеёғеҸҠе…¶жҪңеңЁз ҙеқҸжңәеҲ¶гҖӮжӯӨеӨ–пјҢиҝҳеҲҶдә«дәҶдёҖдәӣе®һжҲҳз»ҸйӘҢе’ҢдјҳеҢ–жҠҖе·§пјҢеҰӮжқҗж–ҷжЁЎеһӢйҖүжӢ©гҖҒжҺҘи§ҰжқЎд»¶и®ҫзҪ®гҖҒиҫ№з•ҢжқЎд»¶еӨ„зҗҶзӯүпјҢејәи°ғдәҶиҝҷдәӣеӣ зҙ еҜ№з»“жһңеҮҶзЎ®жҖ§зҡ„йҮҚиҰҒеҪұе“ҚгҖӮ йҖӮеҗҲдәәзҫӨпјҡд»ҺдәӢең°дёӢз®ЎйҒ“е·ҘзЁӢи®ҫи®ЎгҖҒж–Ҫе·ҘеҸҠз»ҙжҠӨзҡ„дё“дёҡжҠҖжңҜдәәе‘ҳпјҢе°Өе…¶жҳҜйӮЈдәӣеёҢжңӣж·ұе…ҘдәҶи§Јж»‘еқЎе’ҢжІүйҷҚеҜ№з®ЎйҒ“еҪұе“Қзҡ„з ”з©¶дәәе‘ҳе’ҢжҠҖжңҜ专家гҖӮ дҪҝз”ЁеңәжҷҜеҸҠзӣ®ж ҮпјҡйҖӮз”ЁдәҺиҜ„дј°е’Ңйў„жөӢж»‘еқЎе’ҢжІүйҷҚеҜ№еҹӢең°з®ЎйҒ“йҖ жҲҗзҡ„еҠӣеӯҰе“Қеә”пјҢеё®еҠ©е·ҘзЁӢеёҲ们жӣҙеҘҪең°зҗҶи§Је’Ңеә”еҜ№еӨҚжқӮзҡ„ең°иҙЁзҒҫе®ізҺҜеўғпјҢд»ҺиҖҢжҸҗй«ҳз®ЎйҒ“зі»з»ҹзҡ„е®үе…ЁжҖ§дёҺзЁіе®ҡжҖ§гҖӮ е…¶д»–иҜҙжҳҺпјҡж–ҮдёӯжҸҗдҫӣзҡ„Pythonд»Јз ҒзүҮж®өд»…дёәзӨәж„ҸпјҢе…·дҪ“е®һж–Ҫж—¶йңҖз»“еҗҲABAQUSзҡ„е®һйҷ…жҺҘеҸЈе’ҢйЎ№зӣ®йңҖжұӮиҝӣиЎҢйҖӮеҪ“и°ғж•ҙгҖӮеҗҢж—¶пјҢеҜ№дәҺеӨ§и§„жЁЎжЁЎеһӢзҡ„и®Ўз®—пјҢе»әи®®дҪҝз”Ёй«ҳжҖ§иғҪи®Ўз®—иө„жәҗд»ҘзЎ®дҝқж•ҲзҺҮе’ҢзІҫеәҰгҖӮ
JavaдёҖеӨ©йқўиҜ•зӘҒеҮ»пјҢиҝ…йҖҹжҺҢжҸЎJavaеёёи§ҒйқўиҜ•йўҳ
иҺІеӯҗеҺ»еЈіжңәи®ҫи®ЎжЁЎеһӢSW10_дёүз»ҙ3Dи®ҫи®Ўеӣҫзәё_еҢ…жӢ¬йӣ¶д»¶еӣҫ_жңәжў°3DеӣҫеҸҜдҝ®ж”№жү“еҢ…дёӢиҪҪ_дёүз»ҙ3Dи®ҫи®Ўеӣҫзәё_еҢ…жӢ¬йӣ¶д»¶еӣҫ_жңәжў°3DеӣҫеҸҜдҝ®ж”№жү“еҢ…дёӢиҪҪ.zip
MFRC-522+RC522+RFIDе°„йў‘+ICеҚЎж„ҹеә”жЁЎеқ—
еҶ…е®№жҰӮиҰҒпјҡгҖҠеӯҰжңҜз ”з©¶жҸҗзӨәи®ҫи®Ў 50 жӢӣгҖӢжҳҜдёҖд»ҪиҜҰе°Ҫзҡ„жҢҮеҚ—пјҢж—ЁеңЁеё®еҠ©з ”究дәәе‘ҳжҸҗй«ҳеӯҰжңҜеҶҷдҪңе’Ңз ”з©¶ж•ҲзҺҮгҖӮиҜҘж–ҮжЎЈж¶өзӣ–дәҶд»Һи®әж–Үж’°еҶҷгҖҒж¶ҰиүІгҖҒзҝ»иҜ‘гҖҒжҹҘйҮҚйҷҚйҮҚгҖҒеҸӮиҖғж–ҮзҢ®з®ЎзҗҶгҖҒжҠ•зЁҝе®ЎзЁҝеҲ°ж–ҮзҢ®йҳ…иҜ»зӯүеӨҡдёӘж–№йқўзҡ„е…·дҪ“ж“ҚдҪңжҢҮд»ӨгҖӮжҜҸдёҖз« иҠӮеқҮй’ҲеҜ№зү№е®ҡд»»еҠЎжҸҗдҫӣдәҶиҜҰз»Ҷзҡ„жӯҘйӘӨе’ҢжіЁж„ҸдәӢйЎ№пјҢдҫӢеҰӮеҰӮдҪ•ж’°еҶҷж ҮйўҳгҖҒж‘ҳиҰҒгҖҒиҮҙи°ўпјҢеҰӮдҪ•иҝӣиЎҢиӢұж–Үж¶ҰиүІгҖҒдёӯиӢұзҝ»иҜ‘пјҢд»ҘеҸҠеҰӮдҪ•дјҳеҢ–йҖ»иҫ‘з»“жһ„зӯүгҖӮж–ҮжЎЈиҝҳд»Ӣз»ҚдәҶеҰӮдҪ•еҲ©з”ЁAIе·Ҙе…·иҝӣиЎҢж–ҮзҢ®еҲҶжһҗгҖҒжңҜиҜӯиЎЁжҸҗеҸ–е’Ңз ”з©¶ж–№еҗ‘жҺўзҙўзӯүеҶ…е®№пјҢдёәз ”з©¶иҖ…жҸҗдҫӣдәҶе…Ёйқўзҡ„ж”ҜжҢҒгҖӮ йҖӮеҗҲдәәзҫӨпјҡйҖӮз”ЁдәҺеӯҰжңҜз ”з©¶дәәе‘ҳпјҢзү№еҲ«жҳҜйӮЈдәӣйңҖиҰҒж’°еҶҷгҖҒж¶ҰиүІе’ҢжҸҗдәӨеӯҰжңҜи®әж–Үзҡ„з ”з©¶иҖ…пјҢеҢ…жӢ¬з ”究з”ҹгҖҒеҚҡеЈ«з”ҹеҸҠй«ҳж Ўж•ҷеёҲзӯүгҖӮ дҪҝз”ЁеңәжҷҜеҸҠзӣ®ж Үпјҡв‘ жҸҗдҫӣдёҖзі»еҲ—е…·дҪ“зҡ„жҢҮд»ӨпјҢеё®еҠ©з ”究иҖ…й«ҳж•Ҳе®ҢжҲҗи®әж–Үзҡ„еҗ„дёӘйғЁеҲҶпјҢеҰӮж’°еҶҷж ҮйўҳгҖҒж‘ҳиҰҒгҖҒиҮҙи°ўзӯүпјӣв‘Ў жҸҗдҫӣж¶ҰиүІе’Ңзҝ»иҜ‘зҡ„иҜҰз»ҶжҢҮеҜјпјҢзЎ®дҝқи®әж–ҮиҜӯиЁҖзҡ„еҮҶзЎ®жҖ§е’Ңдё“дёҡжҖ§пјӣв‘ў жҸҗдҫӣжҹҘйҮҚйҷҚйҮҚзҡ„ж–№жі•пјҢзЎ®дҝқи®әж–Үзҡ„еҺҹеҲӣжҖ§пјӣв‘Ј жҸҗдҫӣеҸӮиҖғж–ҮзҢ®з®ЎзҗҶе’ҢжҠ•зЁҝе®ЎзЁҝзҡ„жҢҮеҜјпјҢеё®еҠ©з ”究иҖ…йЎәеҲ©еҸ‘иЎЁи®әж–Үпјӣв‘Ө еҲ©з”ЁAIе·Ҙе…·иҝӣиЎҢж–ҮзҢ®еҲҶжһҗгҖҒжңҜиҜӯиЎЁжҸҗеҸ–е’Ңз ”з©¶ж–№еҗ‘жҺўзҙўпјҢжҸҗй«ҳз ”з©¶ж•ҲзҺҮгҖӮ йҳ…иҜ»е»әи®®пјҡжӯӨиө„жәҗдёҚд»…жҸҗдҫӣдәҶе…·дҪ“зҡ„жҢҮд»Өе’Ңж–№жі•пјҢжӣҙйҮҚиҰҒзҡ„жҳҜеј•еҜјз ”究иҖ…еҰӮдҪ•жҖқиҖғе’Ңи§ЈеҶій—®йўҳгҖӮеӣ жӯӨпјҢеңЁеӯҰд№ иҝҮзЁӢдёӯпјҢдёҚд»…иҰҒе…іжіЁе…·дҪ“зҡ„жӯҘйӘӨпјҢиҝҳиҰҒзҗҶи§ЈиғҢеҗҺзҡ„еҺҹзҗҶе’ҢйҖ»иҫ‘пјҢз»“еҗҲе®һйҷ…жЎҲдҫӢиҝӣиЎҢе®һи·өе’ҢеҸҚжҖқгҖӮ
йЎ№зӣ®optionc-20250409
2023е№ҙcиҜӯиЁҖзЁӢеәҸи®ҫи®Ўеҹәжң¬жҰӮеҝөиҖғзӮ№еҪ’зәі.doc
з”өеӯҗд»ҝзңҹж•ҷзЁӢпјҢд»ҺеҹәзЎҖеҲ°зІҫйҖҡпјҢжҜҸдёӘеҺӢзј©еҢ…15зҜҮж•ҷзЁӢпјҢжҜҸзҜҮж•ҷзЁӢ5000еӯ—д»ҘдёҠгҖӮ
еҶ…е®№жҰӮиҰҒпјҡжң¬ж–ҮиҜҰз»Ҷд»Ӣз»ҚдәҶдҪҝз”ЁMatlabиҝӣиЎҢжЁЎжӢҹе’Ңж•°еӯ—ж»ӨжіўеҷЁи®ҫи®Ўзҡ„ж–№жі•пјҢж¶өзӣ–дәҶе·ҙзү№жІғж–ҜгҖҒеҲҮжҜ”йӣӘеӨ«зӯүеӨҡз§Қз»Ҹе…ёж»ӨжіўеҷЁзұ»еһӢгҖӮйҰ–е…Ҳи®Іи§ЈдәҶжЁЎжӢҹж»ӨжіўеҷЁзҡ„и®ҫи®ЎпјҢеҰӮе·ҙзү№жІғж–Ҝж»ӨжіўеҷЁзҡ„йҖҡеёҰе№іеқҰжҖ§е’ҢеҲҮжҜ”йӣӘеӨ«ж»ӨжіўеҷЁзҡ„йҖҡеёҰжіўзә№зү№жҖ§пјҢ并жҸҗдҫӣдәҶе…·дҪ“зҡ„д»Јз ҒзӨәдҫӢгҖӮжҺҘзқҖи®Ёи®әдәҶж•°еӯ—ж»ӨжіўеҷЁзҡ„и®ҫи®ЎпјҢеҢ…жӢ¬IIRж»ӨжіўеҷЁзҡ„йҖ’еҪ’зү№жҖ§е’ҢFIRж»ӨжіўеҷЁзҡ„зәҝжҖ§зӣёдҪҚзү№жҖ§пјҢеҗҢж ·йҷ„жңүиҜҰз»Ҷзҡ„д»Јз Ғе®һзҺ°гҖӮж–Үдёӯиҝҳзү№еҲ«ејәи°ғдәҶдёҚеҗҢзұ»еһӢж»ӨжіўеҷЁд№Ӣй—ҙзҡ„иҪ¬жҚўж–№жі•д»ҘеҸҠи®ҫи®ЎиҝҮзЁӢдёӯеёёи§Ғзҡ„жіЁж„ҸдәӢйЎ№пјҢеҰӮйў‘зҺҮеҪ’дёҖеҢ–гҖҒйҳ¶ж•°йҖүжӢ©зӯүгҖӮжңҖеҗҺжҺЁиҚҗдәҶдёҖдәӣе®һз”Ёзҡ„Matlabе·Ҙе…·пјҢеҰӮfvtoolе’ҢFDAToolпјҢеё®еҠ©з”ЁжҲ·жӣҙзӣҙи§Ӯең°зҗҶи§Је’Ңи°ғиҜ•ж»ӨжіўеҷЁи®ҫи®ЎгҖӮ йҖӮеҗҲдәәзҫӨпјҡе…·жңүдёҖе®ҡдҝЎеҸ·еӨ„зҗҶеҹәзЎҖе’ҢжҠҖжңҜиғҢжҷҜзҡ„з ”з©¶дәәе‘ҳгҖҒе·ҘзЁӢеёҲеҸҠеӯҰз”ҹгҖӮ дҪҝз”ЁеңәжҷҜеҸҠзӣ®ж ҮпјҡйҖӮз”ЁдәҺйңҖиҰҒиҝӣиЎҢж»ӨжіўеҷЁи®ҫи®Ўзҡ„е®һйҷ…е·ҘзЁӢеә”з”ЁпјҢеҰӮйҖҡдҝЎзі»з»ҹгҖҒйҹійў‘еӨ„зҗҶзӯүйўҶеҹҹгҖӮзӣ®ж ҮжҳҜи®©иҜ»иҖ…жҺҢжҸЎж»ӨжіўеҷЁи®ҫи®Ўзҡ„еҹәжң¬еҺҹзҗҶе’Ңе…·дҪ“е®һзҺ°ж–№жі•пјҢиғҪеӨҹзӢ¬з«Ӣе®ҢжҲҗж»ӨжіўеҷЁзҡ„и®ҫи®Ўе’Ңи°ғиҜ•гҖӮ е…¶д»–иҜҙжҳҺпјҡж–Үз« дёҚд»…жҸҗдҫӣдәҶзҗҶи®әзҹҘиҜҶпјҢиҝҳйҖҡиҝҮеӨ§йҮҸе®һдҫӢд»Јз Ғеё®еҠ©иҜ»иҖ…жӣҙеҘҪең°зҗҶи§Је’Ңеә”з”ЁжүҖеӯҰеҶ…е®№гҖӮе»әи®®иҜ»иҖ…еңЁе®һи·өдёӯеӨҡе°қиҜ•дёҚеҗҢзҡ„еҸӮж•°й…ҚзҪ®пјҢд»ҘеҠ ж·ұеҜ№ж»ӨжіўеҷЁзү№жҖ§зҡ„зҗҶи§ЈгҖӮ
йҘІж–ҷе№ІзҮҘиЈ…зҪ®sw16_дёүз»ҙ3Dи®ҫи®Ўеӣҫзәё_еҢ…жӢ¬йӣ¶д»¶еӣҫ_жңәжў°3DеӣҫеҸҜдҝ®ж”№жү“еҢ…дёӢиҪҪ_дёүз»ҙ3Dи®ҫи®Ўеӣҫзәё_еҢ…жӢ¬йӣ¶д»¶еӣҫ_жңәжў°3DеӣҫеҸҜдҝ®ж”№жү“еҢ…дёӢиҪҪ.zip
еҶ…е®№жҰӮиҰҒпјҡжң¬ж–ҮиҜҰз»Ҷд»Ӣз»ҚдәҶзӢ¬з«ӢеҲҶйҮҸеҲҶжһҗпјҲICAпјүеңЁMATLABзҺҜеўғдёӢзҡ„еә”з”ЁпјҢзү№еҲ«жҳҜеңЁеңҹжңЁе·ҘзЁӢгҖҒиҲӘз©әиҲӘеӨ©е’Ңжңәжў°йўҶеҹҹзҡ„жҢҜеҠЁдҝЎеҸ·еӨ„зҗҶж–№йқўгҖӮж–Үз« йҖҡиҝҮе…·дҪ“е®һдҫӢеұ•зӨәдәҶеҰӮдҪ•еҲ©з”ЁICAе°ҶеӨҚжқӮзҡ„ж··еҗҲдҝЎеҸ·еҲҶи§ЈдёәзӢ¬з«ӢеҲҶйҮҸпјҢд»ҺиҖҢеё®еҠ©иҜҶеҲ«з»“жһ„жҚҹдјӨгҖҒж•…йҡңзү№еҫҒзӯүй—®йўҳгҖӮж–ҮдёӯжҸҗдҫӣдәҶиҜҰз»Ҷзҡ„MATLABд»Јз ҒзӨәдҫӢпјҢж¶өзӣ–ж•°жҚ®йў„еӨ„зҗҶгҖҒж ёеҝғз®—жі•е®һзҺ°д»ҘеҸҠз»“жһңеҸҜи§ҶеҢ–зҡ„е…ЁиҝҮзЁӢгҖӮжӯӨеӨ–пјҢиҝҳи®Ёи®әдәҶICAзҡ„еә”з”ЁйҷҗеҲ¶еҸҠе…¶дёҺе…¶д»–дҝЎеҸ·еӨ„зҗҶж–№жі•зҡ„з»“еҗҲдҪҝз”ЁгҖӮ йҖӮеҗҲдәәзҫӨпјҡд»ҺдәӢеңҹжңЁе·ҘзЁӢгҖҒиҲӘз©әиҲӘеӨ©гҖҒжңәжў°зӯүйўҶеҹҹз ”з©¶е’ҢжҠҖжңҜе·ҘдҪңзҡ„е·ҘзЁӢеёҲеҸҠз ”з©¶дәәе‘ҳпјҢе°Өе…¶жҳҜйӮЈдәӣйңҖиҰҒеӨ„зҗҶеӨҚжқӮжҢҜеҠЁдҝЎеҸ·зҡ„дәәзҫӨгҖӮ дҪҝз”ЁеңәжҷҜеҸҠзӣ®ж Үпјҡв‘ еңҹжңЁе·ҘзЁӢдёӯз”ЁдәҺз»“жһ„еҒҘеә·зӣ‘жөӢпјҢеҰӮжЎҘжўҒгҖҒе»әзӯ‘зү©зҡ„жҢҜеҠЁж•°жҚ®еҲҶжһҗпјӣв‘Ў иҲӘз©әиҲӘеӨ©йўҶеҹҹз”ЁдәҺйЈһиЎҢеҷЁеӨҚеҗҲиҪҪиҚ·еҲҶзҰ»пјӣв‘ў жңәжў°и®ҫеӨҮж•…йҡңиҜҠж–ӯпјҢеҰӮйҪҝиҪ®з®ұгҖҒиҪҙжүҝзӯүйғЁд»¶зҡ„ж•…йҡңзү№еҫҒжҸҗеҸ–гҖӮйҖҡиҝҮICAиғҪеӨҹжңүж•Ҳең°д»ҺеӨҡжәҗж··еҗҲдҝЎеҸ·дёӯеҲҶзҰ»еҮәжңүз”Ёзҡ„зӢ¬з«ӢеҲҶйҮҸпјҢиҫ…еҠ©еҶізӯ–гҖӮ е…¶д»–иҜҙжҳҺпјҡICA并йқһйҖӮз”ЁдәҺжүҖжңүжғ…еҶөпјҢеңЁжҹҗдәӣзү№е®ҡжқЎд»¶дёӢеҸҜиғҪдјҡеӨұж•ҲпјҢеӣ жӯӨйңҖиҰҒз»“еҗҲе®һйҷ…жғ…еҶөзҒөжҙ»иҝҗз”ЁгҖӮеҜ№дәҺеҲқеӯҰиҖ…жқҘиҜҙпјҢеҸҜд»Ҙд»Һз®ҖеҚ•зҡ„д»ҝзңҹж•°жҚ®е…ҘжүӢпјҢйҖҗжӯҘиҝҮжёЎеҲ°зңҹе®һзҡ„е·ҘзЁӢйЎ№зӣ®дёӯгҖӮ
еҶ…е®№жҰӮиҰҒпјҡжң¬ж–ҮиҜҰз»Ҷд»Ӣз»ҚдәҶLinuxж“ҚдҪңзі»з»ҹзҡ„жҰӮеҝөгҖҒзү№зӮ№еҸҠе…¶еёёи§Ғе‘Ҫд»ӨпјҢж—ЁеңЁеё®еҠ©з”ЁжҲ·жҺҢжҸЎLinuxзҡ„еҹәзЎҖзҹҘиҜҶе’Ңж“ҚдҪңжҠҖиғҪгҖӮж–Үз« йҰ–е…ҲжҰӮиҝ°дәҶLinuxзҡ„ж“ҚдҪңзі»з»ҹзү№жҖ§пјҢеҰӮе…Қиҙ№гҖҒзЁіе®ҡгҖҒй«ҳж•ҲпјҢд»ҘеҸҠе…¶е№ҝжіӣзҡ„еә”з”ЁйўҶеҹҹпјҢеҢ…жӢ¬жңҚеҠЎеҷЁе’ҢдёӘдәәи®ҫеӨҮгҖӮжҺҘзқҖд»Ӣз»ҚдәҶLinuxзҡ„е®үиЈ…дёҺй…ҚзҪ®пјҢеҢ…жӢ¬иҷҡжӢҹжңәзҡ„еҲӣе»әгҖҒеҲҶеҢәи®ҫзҪ®гҖҒзҪ‘з»ңй…ҚзҪ®зӯүгҖӮйҡҸеҗҺпјҢйҮҚзӮ№и®Іи§ЈдәҶLinuxе‘Ҫд»ӨиЎҢзҡ„еҹәжң¬е‘Ҫд»ӨпјҢж¶өзӣ–ж–Ү件е’Ңзӣ®еҪ•з®ЎзҗҶгҖҒз”ЁжҲ·е’Ңжқғйҷҗз®ЎзҗҶгҖҒиҝӣзЁӢе’ҢжңҚеҠЎз®ЎзҗҶзӯүж–№йқўгҖӮжӯӨеӨ–пјҢиҝҳж¶үеҸҠдәҶиҝңзЁӢзҷ»еҪ•гҖҒж–Үд»¶дј иҫ“гҖҒж–Үжң¬зј–иҫ‘еҷЁпјҲеҰӮvi/vimпјүгҖҒе®ҡж—¶д»»еҠЎгҖҒзЈҒзӣҳз®ЎзҗҶгҖҒзҪ‘з»ңй…ҚзҪ®гҖҒжңҚеҠЎз®ЎзҗҶе’ҢеҢ…з®ЎзҗҶе·Ҙе…·пјҲеҰӮrpm/yumпјүгҖӮжңҖеҗҺз®ҖиҰҒд»Ӣз»ҚдәҶShellзј–зЁӢзҡ„еҹәзЎҖзҹҘиҜҶпјҢеҢ…жӢ¬еҸҳйҮҸгҖҒжқЎд»¶еҲӨж–ӯе’Ңи„ҡжң¬зј–еҶҷгҖӮ йҖӮеҗҲдәәзҫӨпјҡйҖӮеҗҲеҲқеӯҰиҖ…е’ҢжңүдёҖе®ҡз»ҸйӘҢзҡ„Linuxз”ЁжҲ·пјҢзү№еҲ«жҳҜеёҢжңӣж·ұе…ҘдәҶи§ЈLinuxзі»з»ҹз®ЎзҗҶе’Ңж“ҚдҪңзҡ„ITд»ҺдёҡиҖ…гҖӮ дҪҝз”ЁеңәжҷҜеҸҠзӣ®ж Үпјҡв‘ её®еҠ©з”ЁжҲ·зҶҹжӮүLinuxж“ҚдҪңзі»з»ҹзҡ„зү№жҖ§е’Ңеә”з”ЁеңәжҷҜпјӣв‘ЎжҺҢжҸЎLinuxзі»з»ҹзҡ„еҹәжң¬е‘Ҫд»Өе’Ңж“ҚдҪңжҠҖе·§пјӣв‘ўеӯҰдјҡй…ҚзҪ®е’Ңз®ЎзҗҶLinuxжңҚеҠЎеҷЁпјҢеҢ…жӢ¬ж–Ү件系з»ҹгҖҒз”ЁжҲ·жқғйҷҗгҖҒзҪ‘з»ңи®ҫзҪ®е’ҢжңҚеҠЎз®ЎзҗҶпјӣв‘ЈиғҪеӨҹзј–еҶҷз®ҖеҚ•зҡ„Shellи„ҡжң¬жқҘиҮӘеҠЁеҢ–ж—Ҙеёёд»»еҠЎгҖӮ йҳ…иҜ»е»әи®®пјҡз”ұдәҺжң¬ж–ҮеҶ…е®№дё°еҜҢдё”ж¶үеҸҠйқўе№ҝпјҢе»әи®®иҜ»иҖ…еңЁеӯҰд№ иҝҮзЁӢдёӯз»“еҗҲе®һйҷ…ж“ҚдҪңиҝӣиЎҢз»ғд№ пјҢзү№еҲ«жҳҜеңЁе‘Ҫд»ӨиЎҢж“ҚдҪңгҖҒж–Ү件管зҗҶгҖҒз”ЁжҲ·жқғйҷҗи®ҫзҪ®е’ҢShellзј–зЁӢж–№йқўгҖӮеҜ№дәҺеӨҚжқӮе‘Ҫд»Өе’ҢжҰӮеҝөпјҢеҸҜд»ҘйҖҡиҝҮжҹҘйҳ…е®ҳж–№ж–ҮжЎЈжҲ–еңЁзәҝиө„жәҗиҝӣдёҖжӯҘеҠ ж·ұзҗҶи§ЈгҖӮ
stm32д»ҝзңҹеҢ…-proteus8.15