ćŹć轏čŞďźhttp://blog.csdn.net/carson2005/article/details/7185552
     ĺ¨äťçťĺŻšć°ćĺć äšĺďźčŽŠć䝏ĺ
ćĽäťçťćĺć çćŚĺżľăĺ¨ĺšłé˘ĺ
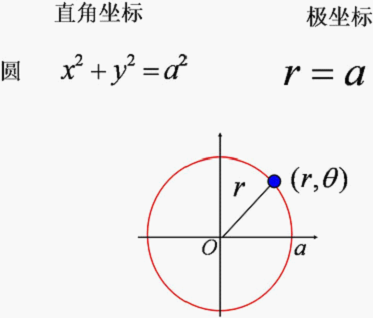
éćŠä¸ä¸ŞĺŽçšOä˝ä¸şâćçšâďźäťčŻĽçšĺźĺşä¸ćĄĺ°çşżOXďźĺŤĺâćč˝´âďźĺéĺŽä¸ä¸ŞéżĺşŚĺä˝ĺč§ĺşŚçćŁćšĺ(é常ĺéćśéćšĺ)ă寚äşĺšłé˘ĺ
äťťä˝ä¸çšMďźĺŻäťĽç¨rćĽčĄ¨ç¤şOMçéżĺşŚďźç¨čĄ¨ç¤şOMĺ°OXć轏čżçč§ĺşŚăéŁäšďź 尹袍称为çšMçćĺć ăç¨čżç§ćšćłĺťşçŤçĺć çłťĺŤĺćĺć çłťăćžçśďźćĺć çłťĺç´č§ĺć çłťäšé´ĺĺ¨ç寚ĺşĺ
łçłťďźĺłďź
尹袍称为çšMçćĺć ăç¨čżç§ćšćłĺťşçŤçĺć çłťĺŤĺćĺć çłťăćžçśďźćĺć çłťĺç´č§ĺć çłťäšé´ĺĺ¨ç寚ĺşĺ
łçłťďźĺłďź ďźäšĺŻäťĽĺ为ďź
ďźäšĺŻäťĽĺ为ďź ă
ă
       饺䞿ćä¸ä¸ďźçŹŹä¸ä¸Şä˝żç¨ćĺć ćĽçĄŽĺŽĺšłé˘ĺ
çšçĺć ä˝ç˝ŽçäşşćŻç饿ă
      ä¸ĺžć示ďźĺ°ąćŻä¸ä¸Şĺĺ¨ç´č§ĺć çłťĺćĺć çłťä¸ç襨示ăĺŻč§ďźĺä¸çäťťćä¸çšçĺć ďźĺŻäťĽç¨ çćĺć 形ĺźćĽčĄ¨ç¤şďźäšĺŻäťĽç¨(x,y)çç´č§ĺć 形ĺźćĽčĄ¨ç¤şă
çćĺć 形ĺźćĽčĄ¨ç¤şďźäšĺŻäťĽç¨(x,y)çç´č§ĺć 形ĺźćĽčĄ¨ç¤şă
寚ć°ćĺć ďźéĄžĺćäšďźĺ°ąćŻĺ¨ćĺć çĺşçĄä¸ďźĺ˘ĺ â寚ć°âďźĺłlogčżçŽăç´č§ĺć ĺ寚ć°ćĺć äšé´ĺĺ¨çĺŚä¸ç轏ć˘ĺ
łçłťďź
 ďźĺ
śä¸ďź
ďźĺ
śä¸ďź
ćĺć ĺ寚ć°ćĺć ćĺžĺ¤ĺžĺĽ˝çć§č´¨ďźĺ ć¤ďźĺ¨ĺžĺĺ¤çä¸ďźć䝏äšçťĺ¸¸č˝č§ĺ°ĺŽç躍役ăäžĺŚďźĺ¨ĺžĺćźćĽä¸ďźçťĺ¸¸äźč§ĺ°ĺ°ĺžĺäťçŹĺĄĺ°ç´č§ĺć 糝轏ć˘ĺ°ĺŻšć°ćĺć çłťä¸ďźčżčĄĺžĺć轏尺庌ĺ矊ćžĺ ĺç莥çŽďźĺšśäťĽć¤ćĽčżčĄĺçťçĺšé
ĺçŤćŁăé
ĺçćä˝ă
                                    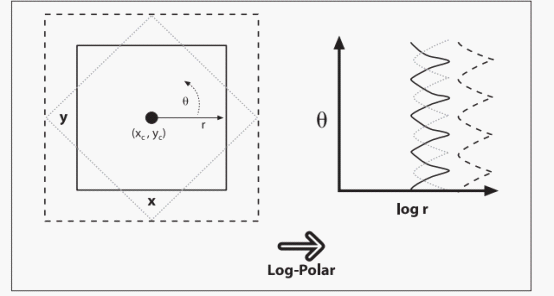
ä¸ĺžĺ°ąćŻä¸ä¸Şĺ
¸ĺçäžĺďźĺˇŚčžšćŻç´č§ĺć çłťä¸çä¸ä¸ŞçŠĺ˝˘ďźĺĺŤç¨ç˛ĺŽçşżăçťčçşżăç˛čçşżćĽčĄ¨ç¤şďźďźĺłčžšćŻĺŻšć°ćĺć ä¸čĄ¨ç¤şçä¸ä¸ŞçŠĺ˝˘ăĺžćžçśďźç´č§ĺć çłťä¸ç˛č线襨示ççŠĺ˝˘ďźčˇçŚťä¸ĺżçš çčˇçŚťćéżďźĺ ć¤ďźč˝Źć˘ĺ°ĺŻšć°ćĺć ä¸ćśďźĺ
śä˝äşlogrč˝´çćĺłćšăčç´č§ĺć çłťä¸ç˛ĺŽçşżĺçťč线襨示ç两个çŠĺ˝˘ďźčˇçŚťä¸ĺżçšçčˇçŚťç¸çďźä˝ćŻďźä¸¤č
äšé´ĺĺ¨ç45庌ç多č§ďźččżĺ¨ĺŻšć°ćĺć ä¸ďźĺŻäťĽććžççĺşă
çčˇçŚťćéżďźĺ ć¤ďźč˝Źć˘ĺ°ĺŻšć°ćĺć ä¸ćśďźĺ
śä˝äşlogrč˝´çćĺłćšăčç´č§ĺć çłťä¸ç˛ĺŽçşżĺçťč线襨示ç两个çŠĺ˝˘ďźčˇçŚťä¸ĺżçšçčˇçŚťç¸çďźä˝ćŻďźä¸¤č
äšé´ĺĺ¨ç45庌ç多č§ďźččżĺ¨ĺŻšć°ćĺć ä¸ďźĺŻäťĽććžççĺşă
ĺ亍ĺ°ďź





ç¸ĺ łć¨č
### ä¸ç§ĺşäşĺŻšć°ćĺć ĺć˘çĺžĺé ĺćšćł #### ćčŚä¸čćŻäťçť ĺ¨čŽĄçŽćşč§č§é˘ĺďźĺžĺé ĺććŻćŻä¸éĄšéčŚçĺşçĄććŻďźä¸ťčŚç¨äşĺ¤çĺ¤ĺš ĺžĺäšé´çĺ ä˝ĺŻšé˝éŽé˘ăéçĺşç¨ĺşćŻçćĽçĺ¤ćďźäź çťçĺžĺé ĺćšćłĺ¨...
ĺžĺ寚ć°ćĺć 轏ć˘ćŻä¸ç§ĺ¨ĺžĺĺ¤çé˘ĺä¸ç¨äşĺć˘ĺžĺçťćĺ形ćçććŻăĺŽéčżĺ°ĺžĺäťäź çťççŹĺĄĺ°ĺć 糝轏ć˘ĺ°ĺŻšć°ćĺć çłťďźč˝ĺ¤ć示ĺžĺä¸çéčçšĺžďźĺ°¤ĺ śćŻĺŻšäşĺ ˇćĺžĺ寚称ć§çĺžĺďźčżç§č˝Źć˘ĺŻäťĽć大ĺ°...
### ĺşäşçšĺžçšç寚ć°ćĺć ĺć˘ĺžĺé ĺçŽćłčŻŚč§Ł #### çŽćłčćŻä¸ĺç ĺžĺé ĺććŻćŻĺžĺĺ¤çé˘ĺä¸ä¸éĄšĺ łéŽćč˝ďźĺŽćśĺĺ°ćĽčŞĺä¸ĺşćŻçä¸ĺĺžĺčżčĄç˛žçĄŽç犺é´ĺŻšé˝ďźäťĽĺŽç°ĺžĺčĺăćźćĽă稳ĺçĺşç¨ăĺ¨...
ĺ¨ĺžĺćźćĽčżç¨ä¸ĺŻšäşć轏çĺžĺéčŚčżčĄĺŻšć°ćĺć ĺć˘ďźčŻĽç¨ĺşĺŻäťĽĺŽç°čżç§ĺč˝ă
ä¸ä¸ŞçŽĺç寚ć°ćĺć ĺć˘matlabç¨ĺşďźä˝ä¸şĺ Ľé¨ĺ°ç˝çä¸ćŹĄĺ°čŻďźĺ¸ćč˝ĺžĺ°čŽ¤ĺŻ
ĺ¨äżĄćŻććŻé˘ĺďźĺžĺĺ¤çćŻä¸ä¸ŞéčŚçĺćŻďźćśĺĺ°äźĺ¤ççŽćłĺĺ¤çććŻďźĺ°¤ĺ śĺ¨ĺäşăčŞçŠşčŞĺ¤ŠçéŤç˛žĺşŚçĺžĺĺšé ććŻä¸ďźĺŻšć°ćĺć ĺć˘ďźLog-Polar TransformationďźçŽç§°LPTďźçąäşĺ śč˝ĺ¤ĺ°ĺžĺçć轏ĺ矊ćžéŽé˘...
ćĺć ,寚ć°ćĺć ĺć˘ĺĺ śĺĺć˘ĺçąťmatlabä¸ĺžĺĺ¤ç
为äşçźŠĺĺ˝ä¸ĺĺ˛çŽćłä¸ćĺźçŠéľçč§ć¨Ą, ćĺşäşä¸ç§čĺ寚ć°ćĺć ĺĺ˝ä¸ĺĺ˛çĺžĺĺĺ˛çŽćłăéŚĺ ĺ°ĺĺéć ˇçĺžĺć ĺ°ĺ°ĺŻšć°ćĺć çłťä¸, çśĺčżčĄĺ˝ä¸ĺĺ˛čżçŽ, čžžĺ°ĺĺ°ćśé´ĺ¤ć庌ăćéŤçŽćłć§čĄćçççŽçăĺŽéŞ...
2. **寚ć°ćĺć ćčż°ĺćĺťş**ďźçć寚ć°ćĺć ç˝ć źďźĺšśčŽĄçŽć˘ŻĺşŚä˝ç˝Žćšĺç´ćšĺžďźGLOHďźďźçĄŽĺŽĺŻšć°ćĺć ç睴庌ďźäťĽéĺşUAV役ĺçšçšă 3. **ä˝ç˝Žĺ°şĺşŚçşŚćç揧ć°čˇçŚťĺšé **ďźĺ¨ĺšé čżç¨ä¸ččçšĺžçšçä˝ç˝Žĺ尺庌ďźĺťşçŤ...
ĺŽéčżĺťşçŤĺ¨ĺŻšć°ćĺć çłťä¸çç´ćšĺžćĽćçťĺ˝˘çśč˝Žĺťçšĺžďźäťč粞祎ĺ°ććĺ°ĺ˝˘çśč˝Žĺťä¸éć ˇçšçĺĺć ĺľăčżç§çŽćłĺŻäťĽććĺ°čĄ¨ç¤şçŠä˝ç形çśçšĺžďźĺ¨ĺžĺĺ¤çĺćşĺ¨č§č§ä¸ćĺšżćłĺşç¨ă éç¨äşşçž¤ďźäťäşčŽĄçŽćşč§č§ă...
ćŹä¸ťé˘ĺ°ćˇąĺ Ľć˘čŽ¨â寚ć°ćĺć ĺć˘âďźčżćŻä¸ç§ĺ°ĺžĺäťçŹĺĄĺ°ĺć 糝轏ć˘ĺ°ĺŻšć°ćĺć çłťçćšćłăčżç§č˝Źć˘ĺ¨ćäşçšĺŽĺşç¨ä¸ďźĺŚĺžĺć轏ä¸ĺć§ăĺ°çŽć ćŁćľäťĽĺĺžĺćžĺ¤§ä¸çźŠĺ°çćšé˘ĺ ˇćäźĺżă éŚĺ ďźčŽŠć䝏ç解...
ĺ¨ĺŻšć°ćĺć ç˝ć źä¸éć ˇçĺžĺĺ ˇćć蜣ä¸ćç¨ççšć§ă ć轏ĺ矊ćžćŻĺžŽä¸čśłéçćä˝ďźčżĺŻäťĽäş§çç¨äşç´çşżćŁćľĺĺ ćľäź°čŽĄçéŤćçŽćłă čżç§éć ˇćšćĄčżćäžäşççŠä¸ĺżĺšč§č§çç˛çĽć¨ĄĺďźčżĺŻšä¸ťĺ¨čŽĄçŽćşč§č§çłťçťçĺźĺĺž...
为寚ćşçž¤ĺĺ犺ćććĽć§ĺśçłťçťć§č˝čżčĄĺćďźĺťşçŤäşć ĺćşçž¤ććĽć§ĺśçłťçťçťçťçťćďźĺšśćĺşäşć§č˝čŻäťˇćć ăčżç¨éćşPetriç˝ććŻĺĺŤĺťşçŤäşćé˘čŚćşććĽĺć é˘čŚćşććĽçćşçž¤ĺĺ犺ćććĽć§ĺśçłťçťć¨Ąĺă...
é寚čżä¸éŽé˘,ćĺşäşä¸ç§ĺżŤé寚ć°ćĺć ĺć˘çŽćł,ĺ 忍äşäťçŹĺĄĺżĺć 轏ć˘ĺ°ĺŻšć°ćĺć çčżç¨ă éčżéç¨ĺč˝´ć役ç¸äźźĺşŚĺćçŽćłĺŻšçŽć ĺžĺčżčĄĺšé ,čżä¸ćĽĺ 忍äşčŻĺŤé庌,ĺćśäżčŻäşĺšé çĺŻé ć§ăç莺 ĺćĺčŻéŞ...