转自:http://www.cppblog.com/kevinlynx/archive/2008/06/06/52356.html
Proactor和Reactor都是并发编程中的设计模式。在我看来,他们都是用于派发/分离IO操作事件的。这里所谓的
IO事件也就是诸如read/write的IO操作。"派发/分离"就是将单独的IO事件通知到上层模块。两个模式不同的地方
在于,Proactor用于异步IO,而Reactor用于同步IO。
摘抄一些关键的东西:
"
Two patterns that involve event demultiplexors are called Reactor and Proactor [1]. The Reactor patterns
involve synchronous I/O, whereas the Proactor pattern involves asynchronous I/O.
"
关于两个模式的大致模型,从以下文字基本可以明白:
"
An example will help you understand the difference between Reactor and Proactor. We will focus on the read
operation here, as the write implementation is similar. Here's a read in Reactor:
* An event handler declares interest in I/O events that indicate readiness for read on a particular socket ;
* The event demultiplexor waits for events ;
* An event comes in and wakes-up the demultiplexor, and the demultiplexor calls the appropriate handler;
* The event handler performs the actual read operation, handles the data read, declares renewed interest in
I/O events, and returns control to the dispatcher .
By comparison, here is a read operation in Proactor (true async):
* A handler initiates an asynchronous read operation (note: the OS must support asynchronous I/O). In this
case, the handler does not care about I/O readiness events, but is instead registers interest in receiving
completion events;
* The event demultiplexor waits until the operation is completed ;
* While the event demultiplexor waits, the OS executes the read operation in a parallel kernel thread, puts
data into a user-defined buffer, and notifies the event demultiplexor that the read is complete ;
* The event demultiplexor calls the appropriate handler;
* The event handler handles the data from user defined buffer, starts a new asynchronous operation, and returns
control to the event demultiplexor.
"
可以看出,两个模式的相同点,都是对某个IO事件的事件通知(即告诉某个模块,这个IO操作可以进行或已经完成)。在结构
上,两者也有相同点:demultiplexor负责提交IO操作(异步)、查询设备是否可操作(同步),然后当条件满足时,就回调handler。
不同点在于,异步情况下(Proactor),当回调handler时,表示IO操作已经完成;同步情况下(Reactor),回调handler时,表示
IO设备可以进行某个操作(can read or can write),handler这个时候开始提交操作。
用select模型写个简单的reactor,大致为:
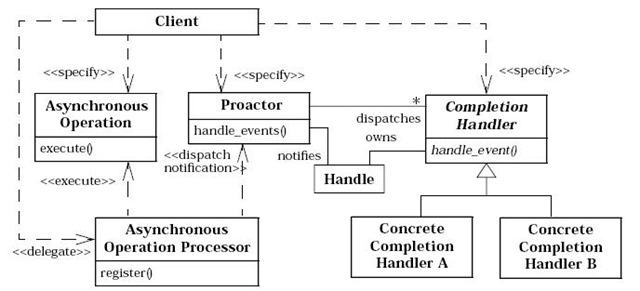
在网上找了份Proactor模式比较正式的文档,其给出了一个总体的UML类图,比较全面:
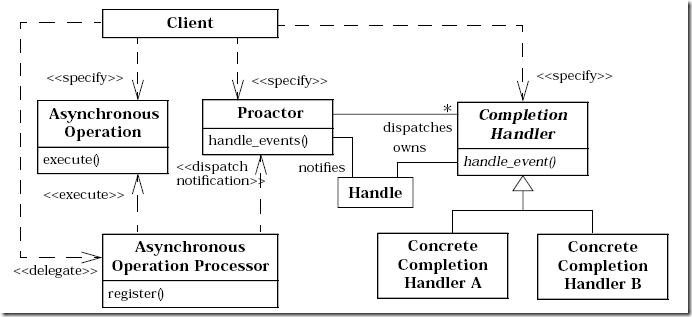
根据这份图我随便写了个例子代码:
Reactor通过某种变形,可以将其改装为Proactor,在某些不支持异步IO的系统上,也可以隐藏底层的实现,利于编写跨平台
代码。我们只需要在dispatch(也就是demultiplexor)中封装同步IO操作的代码,在上层,用户提交自己的缓冲区到这一层,
这一层检查到设备可操作时,不像原来立即回调handler,而是开始IO操作,然后将操作结果放到用户缓冲区(读),然后再
回调handler。这样,对于上层handler而言,就像是proactor一样。详细技法参见这篇文章。
其实就设计模式而言,我个人觉得某个模式其实是没有完全固定的结构的。不能说某个模式里就肯定会有某个类,类之间的
关系就肯定是这样。在实际写程序过程中也很少去特别地实现某个模式,只能说模式会给你更多更好的架构方案。
最近在看spserver的代码,看到别人提各种并发系统中的模式,有点眼红,于是才来扫扫盲。知道什么是leader follower模式,
reactor, proactor,multiplexing,对于心中的那个网络库也越来越清晰。
最近还干了些离谱的事,写了传说中的字节流编码,用模板的方式实现,不但保持了扩展性,还少写很多代码;处于效率考虑,
写了个static array容器(其实就是template <typename _Tp, std::size_t size> class static_array { _Tp _con[size]),
加了iterator,遵循STL标准,可以结合进STL的各个generic algorithm用,自我感觉不错。基础模块搭建完毕,解析了公司
服务器网络模块的消息,我是不是真的打算用自己的网络模块重写我的验证服务器?在另一个给公司写的工具里,因为实在厌恶
越来越多的重复代码,索性写了几个宏,还真的做到了代码的自动生成:D。
对优雅代码的追求真的成了种癖好. = =|
分享到:







 }
}

 }
}

相关推荐
在并发系统设计中,Proactor和Reactor模式是两种常用的设计模式,它们主要用来处理I/O操作的事件派发和分离。这两种模式都是为了提高系统的并发能力,优化资源利用,但它们在处理I/O事件的方式上有所不同。 首先,...
内容概要:本文详细介绍了Linux设备文件系统从devfs到udev的演变过程。devfs作为Linux 2.4时代的创新,通过引入内核空间的设备管理机制,简化了设备文件的创建和管理,但其存在稳定性问题和灵活性不足的缺点。udev则运行在用户空间,利用内核发送的热插拔事件和sysfs提供的信息,实现了设备文件的动态管理和高度自定义。它不仅解决了devfs的问题,还提供了更灵活、高效的设备管理方式,成为现代Linux系统中的主流选择。文章还探讨了两者在不同应用场景中的优劣,并展望了未来Linux设备管理的发展方向,强调了对新型设备的支持、虚拟化和容器环境的兼容性以及智能化的用户体验。 适合人群:对Linux系统有一定了解,特别是对设备管理感兴趣的开发人员、系统管理员和技术爱好者。 使用场景及目标:①理解Linux设备管理的历史和发展趋势;②掌握devfs和udev的工作原理及其在不同场景下的应用;③学习如何编写udev规则文件,实现设备的个性化管理和优化配置。 阅读建议:本文内容较为技术性,建议读者先了解基本的Linux设备管理概念。在阅读过程中,重点关注devfs和udev的区别和优势,并结合实际应用场景进行思考。对于udev规则文件的编写,可以通过实践和调试加深理解。
内容概要:本文详细介绍了将快速随机树(RRT*)和人工势场(APF)相结合用于三维空间路径规划的方法。首先阐述了两种算法的工作原理,特别是APF如何通过引力和斥力向量引导RRT*的节点扩展,使得路径规划更加高效且能够有效避开障碍物。接着讨论了路径平滑处理的具体实现方式,如利用贝塞尔曲线进行路径优化,确保最终路径不仅平滑而且不会发生碰撞。此外,文中还提供了具体的代码片段来展示各个模块的功能,包括APF核心算法、RRT*扩展逻辑、碰撞检测以及路径平滑等。同时提到了一些潜在的改进方向,如引入速度场因素、采用不同的平滑算法等。 适合人群:对机器人路径规划、无人驾驶等领域感兴趣的开发者和技术爱好者。 使用场景及目标:适用于需要在复杂三维环境中进行高效路径规划的应用场合,如无人机飞行、自动驾驶汽车等。主要目的是提高路径规划的速度和质量,使生成的路径更加平滑、安全。 其他说明:本文不仅提供了理论解释,还有详细的代码实现,便于读者理解和实践。对于希望深入了解RRT*和APF融合算法并应用于实际项目的读者来说是非常有价值的参考资料。
HikvisionIVMSGetShell-main.zip
动态演示后缀表达式的计算方式
1、该资源内项目代码经过严格调试,下载即用确保可以运行! 2、该资源适合计算机相关专业(如计科、人工智能、大数据、数学、电子信息等)正在做课程设计、期末大作业和毕设项目的学生、或者相关技术学习者作为学习资料参考使用。 3、该资源包括全部源码,需要具备一定基础才能看懂并调试代码。 大学战队2021雷达站视觉算法源码.zip大学战队2021雷达站视觉算法源码.zip 大学战队2021雷达站视觉算法源码.zip大学战队2021雷达站视觉算法源码.zip 大学战队2021雷达站视觉算法源码.zip大学战队2021雷达站视觉算法源码.zip 大学战队2021雷达站视觉算法源码.zip大学战队2021雷达站视觉算法源码.zip 大学战队2021雷达站视觉算法源码.zip大学战队2021雷达站视觉算法源码.zip 大学战队2021雷达站视觉算法源码.zip大学战队2021雷达站视觉算法源码.zip 大学战队2021雷达站视觉算法源码.zip大学战队2021雷达站视觉算法源码.zip 大学战队2021雷达站视觉算法源码.zip大学战队2021雷达站视觉算法源码.zip 大学战队2021雷达站视觉算法源码.zip大学战队2021雷达站视觉算法源码.zip 大学战队2021雷达站视觉算法源码.zip大学战队2021雷达站视觉算法源码.zip 大学战队2021雷达站视觉算法源码.zip大学战队2021雷达站视觉算法源码.zip
MATLAB用户界面设计.pptx
程序员面试题精选100题.pdf
牵牛花铅笔素材儿童教学课件模板
基于C++的rviz机械臂各类仿真+源码+项目文档,适合毕业设计、课程设计、项目开发。项目源码已经过严格测试,可以放心参考并在此基础上延申使用,详情见md文档 基于C++的rviz机械臂各类仿真+源码+项目文档,适合毕业设计、课程设计、项目开发。项目源码已经过严格测试,可以放心参考并在此基础上延申使用,详情见md文档~ 基于C++的rviz机械臂各类仿真+源码+项目文档,适合毕业设计、课程设计、项目开发。项目源码已经过严格测试,可以放心参考并在此基础上延申使用,详情见md文档 基于C++的rviz机械臂各类仿真+源码+项目文档,适合毕业设计、课程设计、项目开发。项目源码已经过严格测试,可以放心参考并在此基础上延申使用,详情见md文档 基于C++的rviz机械臂各类仿真+源码+项目文档,适合毕业设计、课程设计、项目开发。项目源码已经过严格测试,可以放心参考并在此基础上延申使用,详情见md文档 基于C++的rviz机械臂各类仿真+源码+项目文档,适合毕业设计、课程设计、项目开发。项目源码已经过严格测试,可以放心参考并在此基础上延申使用,详情见md文档
内容概要:本文详细介绍了三相电流型PWM整流的Matlab仿真过程,采用了电压外环和电流内环的双闭环控制策略。电压外环负责维持直流侧电压的稳定,通过PI调节器输出电流给定值;电流内环根据电压外环的给定值和实际检测到的三相电流,经过PI调节器产生PWM波来控制整流器的开关动作,实现对交流侧电流的精确控制。文中提供了详细的系统参数设置、PI调节器参数设定、主循环仿真代码以及坐标变换的具体实现方法。此外,还讨论了PWM调制、开关信号生成、仿真结果分析等内容,并附有说明文档和参考文献。 适合人群:从事电力电子、控制系统设计的研究人员和技术人员,尤其是对PWM整流器感兴趣的工程师。 使用场景及目标:适用于研究和开发三相电流型PWM整流器的人员,帮助他们理解和实现双闭环控制策略,提高系统的稳定性和效率。目标是在不同工况下实现直流侧电压的稳定和网侧电流的正弦化,达到单位功率因数运行。 其他说明:文中提供的代码和仿真模型已在MATLAB 2021b及以上版本测试通过,附带的说明文档包含了参数整定表、典型波形库和故障排查指南,有助于解决实际应用中的问题。
内容概要:本文详细探讨了五相永磁同步电机(PMSM)在发生单相开路故障时的矢量容错控制方法。首先介绍了五相电机相较于三相电机的优势及其容错机制的基本原理。随后,文章深入讨论了故障发生时的电流重构策略,包括Clarke变换矩阵的修改、电流补偿系数的选择以及相位补偿的方法。此外,文中还涉及了矢量控制的具体实现,如矢量合成、SVPWM调制方式的调整、电流环整定的自适应算法等。最后,通过实测数据分析了不同故障条件下的系统表现,并提出了进一步的研究方向和技术改进措施。 适合人群:从事电机控制系统设计与开发的技术人员,尤其是关注五相永磁同步电机容错控制领域的研究人员。 使用场景及目标:适用于需要提高电机系统可靠性和容错能力的应用场合,如工业机器人、电动汽车等领域。主要目标是在单相开路故障情况下,确保电机能够继续稳定运行并尽可能减少性能损失。 其他说明:文章不仅提供了理论分析,还包括大量实际案例和代码片段,有助于读者更好地理解和应用相关技术。同时提醒读者,在进行容错控制设计时要考虑实际系统的非线性特性,避免因参数设置不当而导致系统不稳定。
内容概要:本文详细探讨了在单机无穷大系统中加入电力系统稳定器(PSS)前后,系统在不同扰动条件下的暂态响应情况。首先介绍了同步发电机的基本参数配置及其连接方式,然后分别进行了无PSS和带有PSS两种情况下系统的稳态运行、小扰动以及三相短路故障仿真实验。结果显示,PSS能够显著提高系统的阻尼水平,有效抑制因各种原因引起的振荡现象,确保系统快速恢复稳定状态。 适用人群:从事电力系统分析、自动化控制领域的研究人员和技术人员。 使用场景及目标:适用于希望深入了解PSS在电力系统中作用机制的研究者,以及需要评估PSS对于特定应用场景下系统性能改善效果的专业人士。通过本案例的学习,可以帮助使用者掌握如何利用MATLAB/Simulink进行相关仿真实验的方法。 其他说明:文中提供了详细的建模步骤和参数设定指南,并附有多张对比图表帮助理解PSS的作用效果。同时提醒了一些常见的操作误区,如仿真步长的选择等。
2023-04-06-项目笔记-第四百七十三阶段-课前小分享_小分享1.坚持提交gitee 小分享2.作业中提交代码 小分享3.写代码注意代码风格 4.3.1变量的使用 4.4变量的作用域与生命周期 4.4.1局部变量的作用域 4.4.2全局变量的作用域 4.4.2.1全局变量的作用域_1 4.4.2.471局变量的作用域_471- 2025-04-19
病理分割_基于深度学习实现的腹部多器官分割算法_附项目源码_优质项目实战
内容概要:本文详细介绍了基于三菱PLC和三菱触摸屏构建的停车场智能管理系统。系统分为入口、出口和管理中心三大部分,分别负责车辆身份识别、车位检测、道闸控制、缴费结算等功能。三菱PLC作为核心控制器,通过梯形图编程实现了车辆检测、道闸控制等关键逻辑;三菱触摸屏提供人机交互界面,支持参数设置、状态监控等功能。文中还讨论了PLC与触摸屏之间的通信配置,以及如何通过物联网技术将系统接入云端。 适合人群:从事智能交通系统开发的技术人员,尤其是熟悉三菱PLC编程和触摸屏应用的工程师。 使用场景及目标:适用于新建或改造停车场项目,旨在提高停车场管理效率和服务质量,减少人工干预,实现智能化运营。 其他说明:文中提供了具体的硬件配置建议、PLC编程实例、触摸屏界面设计指南及通信协议解析,有助于读者快速理解和实施类似项目。
Code_20250419.html
内容概要:本文详细介绍了基于MSP430F5529微控制器构建的无线温湿度传输系统的完整设计方案。系统集成了DHT11湿度传感器、DS18B20温度传感器、Nokia5110显示屏、按键模块、报警模块和nRF24L01无线传输模块。文章不仅涵盖了硬件连接细节,还深入讲解了各模块的驱动代码实现,包括传感器数据读取、数据显示、按键处理、报警机制和无线数据传输。此外,还讨论了一些优化措施,如低功耗模式的应用和传感器供电稳定性。 适合人群:具有一定嵌入式系统开发基础的技术人员,尤其是对MSP430系列微控制器感兴趣的开发者。 使用场景及目标:适用于需要实时监测环境温湿度并进行远程数据传输的场合,如智能家居、农业温室、工业环境监测等。目标是帮助读者掌握MSP430F5529的实际应用技能,理解各模块之间的协同工作原理。 其他说明:文中提供的代码片段可以直接应用于实际项目中,有助于快速搭建原型系统。同时,文章还提供了一些调试经验和常见问题解决方案,便于读者在实践中少走弯路。
内容概要:本文详细介绍了如何利用台达DVP PLC通过RS485接口与多台变频器进行通信,实现读取设定频率、设定变频器频率及控制启动和停止的功能。主要内容涵盖硬件连接、通讯参数设置、编程实例及常见问题解决方案。文中提供了具体的梯形图代码示例,解释了MODBUS RTU协议的应用,包括功能码的选择、寄存器地址的定义、CRC校验的处理方法等。 适合人群:从事工业自动化领域的工程师和技术人员,特别是那些需要掌握PLC与变频器通信技能的人。 使用场景及目标:适用于需要集成PLC控制系统并管理多个变频器的工作环境,如工厂生产线、自动化设备等。目标是提高系统的稳定性和可靠性,确保各个变频器能够按照预设的要求高效运作。 其他说明:文中强调了实际应用中的注意事项,如硬件连接的准确性、通讯参数的一致性、数据传输的安全性等,并给出了详细的调试建议和优化措施。此外,还提到了一些常见的陷阱及其应对策略,帮助读者更好地理解和解决问题。
内容概要:本文详细介绍了基于MATLAB/Simulink平台构建的二阶线性自抗扰控制器(LADRC)用于电机控制的应用。文章首先指出了传统PI控制器存在的响应慢、易振荡的问题,随后深入探讨了LADRC的核心组成部分:跟踪微分器TD、线性扩张状态观测器LESO以及误差反馈控制律。文中展示了LADRC在面对负载突变时表现出色的抗扰能力和快速响应特性,并提供了具体的参数调整方法和调试技巧。此外,作者还分享了将LADRC应用于实际工程项目的经验,强调了其相较于传统PI控制器的优势,特别是在鲁棒性和适应不同电机型号方面的表现。 适合人群:从事电机控制领域的工程师和技术人员,尤其是那些希望提高控制系统性能并解决传统PI控制器局限性的专业人士。 使用场景及目标:适用于需要快速响应和强抗扰能力的电机控制系统设计,旨在替代传统的PI控制器,以获得更好的动态响应和平滑的操作体验。具体应用场景包括但不限于伺服压机、绕线机等工业自动化设备。 其他说明:文中提到的所有代码片段均可以在MATLAB环境中运行,且已封装成Simulink模块,便于集成到现有系统中进行测试和验证。对于初次接触LADRC的新手而言,文中提供的调试经验和参数选择建议尤为宝贵。