您还没有登录,请您登录后再发表评论
CAN总线协议是一种车载总线标准,广泛应用于汽车电子、工业自动化、医疗设备等领域。 CAN总线协议的主要特点是: 1. serielle 式通信:CAN总线协议采用串行通信方式,通过一个总线连接多个设备,实现设备之间的...
提供的文档《CAN协议,系统结构和帧结构 - Pejoicen - 博客园.pdf》将详细阐述这些概念,是学习CAN协议的宝贵资料。 了解这些基本概念后,开发者能够更好地理解和实施基于CAN协议的通信系统,从而有效地集成和控制...
博世公司在 1986 年发布了 CAN 协议的第一个版本,标志着 CAN 协议的诞生。随着技术的发展和应用的广泛,CAN 协议不断地被改进和升级。1991 年,博世公司发布了 CAN 协议的第二个版本,即我们今天所看到的 CAN ...
这一过程不仅需要对MCGS有深入的理解,还需要掌握CAN协议的基本原理及其实现方法。在实际应用中,这些步骤可能会因为具体需求的不同而有所调整,但总体框架是一致的。对于想要将MCGS与CAN协议结合使用的工程师来说,...
“CAN入门教程.pdf”这份文档很可能是瑞萨电子提供的关于CAN协议的基础教程,涵盖了CAN协议的基本原理、配置、编程和实际应用案例,对于初学者来说是一份宝贵的参考资料。 总的来说,了解和掌握CAN协议,不仅可以...
在Verilog中实现CAN协议控制器是一个复杂的任务,因为这涉及到对CAN协议的深入理解和硬件描述语言的应用。以下是一些关键知识点: 1. **CAN协议结构**:CAN协议分为两种帧类型,数据帧和远程帧。数据帧用于传输实际...
CAN协议,即Controller Area Network(控制器局域网络),是一种国际标准化的串行通信协议,最初由德国博世公司于1986年开发,用于解决汽车中电子控制装置之间的通信问题。其后,CAN协议被ISO国际标准化组织制定为...
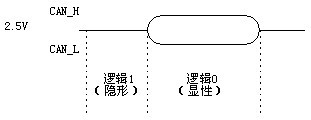
- 为了保证数据传输的正确性,CAN协议规定在连续的5个相同电平后插入一个相反电平的位。 #### 五、标准规格与兼容性 - **ISO标准化**: - CAN协议有两个主要的ISO标准:ISO11898和ISO11519-2。 - ISO11898主要...
【车载福克斯CAN协议及模拟器】涉及到的是汽车电子技术中的关键部分——控制器局域网络(Controller Area Network,简称CAN),这是一种多主通信协议,广泛应用于汽车内部各个电子控制单元(ECU)之间的数据交换。...
5. **位填充**:为防止连续相同位的出现导致误码率增加,CAN协议引入了位填充规则,每连续5个相同的位后自动插入一个相反的位,提高抗干扰能力。 6. **远程帧**:CAN协议支持远程帧,允许节点请求其他节点发送数据...
4. `can_acf.v` - ACF(Acceptance Code Filter)是CAN协议的一部分,用于过滤接收到的消息,只让符合条件的帧通过。 5. `can_btl.v` - BTL(Bit Timing Layer)处理CAN总线的位定时,这是CAN协议的关键部分,确保了...
7. **应用层**:应用层并非CAN协议标准的一部分,而是由用户或特定行业定义的,如汽车行业的J1939或工业自动化领域的CANopen。 提供的两个文件名——"can_bus_protocol_2.0b.pdf"和"BOSCH_CAN_V20_spec.pdf"可能...
现在,我们将聚焦于CAN协议本身,深入探讨这一协议的重要知识点。 首先,CAN(Controller Area Network)协议是一种被广泛应用于各种设备和机器内部通信的网络协议,最初由德国博世公司开发,旨在减少复杂的线束...
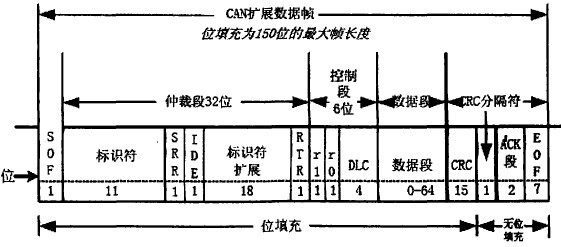
为了适应这样的需求,CAN协议定义了两种报文格式,即标准格式和扩展格式,以应对不同的应用需求。 标准格式使用11位的地址范围来定义报文的识别位,而扩展格式则将地址范围扩展到29位。这样的扩展使得更多的应用...
一、CAN协议概述 CAN总线协议最初由Bosch公司开发,主要设计目标是提高汽车电子系统的可靠性。CAN协议分为物理层、数据链路层和应用层。其中,物理层定义了信号传输介质和电气特性;数据链路层则包括帧结构、错误...
简易CAN协议尤其适合节点数量不多、对通信可靠性要求较高、控制结构相对简单的场合。 在协议的实现中,CAN协议栈的构建是基础。它通常由物理层、数据链路层以及应用层三个层次组成。物理层定义了CAN网络的电气特性...
CAN-FD(Controller Area Network Flexible Data Rate,灵活数据速率控制器局域网络)是一种基于 CAN 2.0 的改进型协议,旨在解决传统 CAN 总线的性能瓶颈问题。下面是 CAN-FD 相关协议的详细介绍: 一、为什么需要...
总的来说,这个压缩包为理解CAN诊断协议提供了一个全面的视角,不仅有技术细节,还有实用的应用指导。对于汽车行业内的工程师、技术人员和学生,这些都是不可或缺的学习资源。通过阅读和研究这些文档,可以深入了解...
CAN Bootloader协议是一种用于CAN (Controller Area Network) 总线上的引导程序协议,它允许通过CAN总线来刷写固件,实现设备程序的更新或恢复。Bootloader协议为嵌入式设备提供了初始的运行环境,以便在设备启动时...







相关推荐
CAN总线协议是一种车载总线标准,广泛应用于汽车电子、工业自动化、医疗设备等领域。 CAN总线协议的主要特点是: 1. serielle 式通信:CAN总线协议采用串行通信方式,通过一个总线连接多个设备,实现设备之间的...
提供的文档《CAN协议,系统结构和帧结构 - Pejoicen - 博客园.pdf》将详细阐述这些概念,是学习CAN协议的宝贵资料。 了解这些基本概念后,开发者能够更好地理解和实施基于CAN协议的通信系统,从而有效地集成和控制...
博世公司在 1986 年发布了 CAN 协议的第一个版本,标志着 CAN 协议的诞生。随着技术的发展和应用的广泛,CAN 协议不断地被改进和升级。1991 年,博世公司发布了 CAN 协议的第二个版本,即我们今天所看到的 CAN ...
这一过程不仅需要对MCGS有深入的理解,还需要掌握CAN协议的基本原理及其实现方法。在实际应用中,这些步骤可能会因为具体需求的不同而有所调整,但总体框架是一致的。对于想要将MCGS与CAN协议结合使用的工程师来说,...
“CAN入门教程.pdf”这份文档很可能是瑞萨电子提供的关于CAN协议的基础教程,涵盖了CAN协议的基本原理、配置、编程和实际应用案例,对于初学者来说是一份宝贵的参考资料。 总的来说,了解和掌握CAN协议,不仅可以...
在Verilog中实现CAN协议控制器是一个复杂的任务,因为这涉及到对CAN协议的深入理解和硬件描述语言的应用。以下是一些关键知识点: 1. **CAN协议结构**:CAN协议分为两种帧类型,数据帧和远程帧。数据帧用于传输实际...
CAN协议,即Controller Area Network(控制器局域网络),是一种国际标准化的串行通信协议,最初由德国博世公司于1986年开发,用于解决汽车中电子控制装置之间的通信问题。其后,CAN协议被ISO国际标准化组织制定为...
- 为了保证数据传输的正确性,CAN协议规定在连续的5个相同电平后插入一个相反电平的位。 #### 五、标准规格与兼容性 - **ISO标准化**: - CAN协议有两个主要的ISO标准:ISO11898和ISO11519-2。 - ISO11898主要...
【车载福克斯CAN协议及模拟器】涉及到的是汽车电子技术中的关键部分——控制器局域网络(Controller Area Network,简称CAN),这是一种多主通信协议,广泛应用于汽车内部各个电子控制单元(ECU)之间的数据交换。...
5. **位填充**:为防止连续相同位的出现导致误码率增加,CAN协议引入了位填充规则,每连续5个相同的位后自动插入一个相反的位,提高抗干扰能力。 6. **远程帧**:CAN协议支持远程帧,允许节点请求其他节点发送数据...
4. `can_acf.v` - ACF(Acceptance Code Filter)是CAN协议的一部分,用于过滤接收到的消息,只让符合条件的帧通过。 5. `can_btl.v` - BTL(Bit Timing Layer)处理CAN总线的位定时,这是CAN协议的关键部分,确保了...
7. **应用层**:应用层并非CAN协议标准的一部分,而是由用户或特定行业定义的,如汽车行业的J1939或工业自动化领域的CANopen。 提供的两个文件名——"can_bus_protocol_2.0b.pdf"和"BOSCH_CAN_V20_spec.pdf"可能...
现在,我们将聚焦于CAN协议本身,深入探讨这一协议的重要知识点。 首先,CAN(Controller Area Network)协议是一种被广泛应用于各种设备和机器内部通信的网络协议,最初由德国博世公司开发,旨在减少复杂的线束...
为了适应这样的需求,CAN协议定义了两种报文格式,即标准格式和扩展格式,以应对不同的应用需求。 标准格式使用11位的地址范围来定义报文的识别位,而扩展格式则将地址范围扩展到29位。这样的扩展使得更多的应用...
一、CAN协议概述 CAN总线协议最初由Bosch公司开发,主要设计目标是提高汽车电子系统的可靠性。CAN协议分为物理层、数据链路层和应用层。其中,物理层定义了信号传输介质和电气特性;数据链路层则包括帧结构、错误...
简易CAN协议尤其适合节点数量不多、对通信可靠性要求较高、控制结构相对简单的场合。 在协议的实现中,CAN协议栈的构建是基础。它通常由物理层、数据链路层以及应用层三个层次组成。物理层定义了CAN网络的电气特性...
CAN-FD(Controller Area Network Flexible Data Rate,灵活数据速率控制器局域网络)是一种基于 CAN 2.0 的改进型协议,旨在解决传统 CAN 总线的性能瓶颈问题。下面是 CAN-FD 相关协议的详细介绍: 一、为什么需要...
总的来说,这个压缩包为理解CAN诊断协议提供了一个全面的视角,不仅有技术细节,还有实用的应用指导。对于汽车行业内的工程师、技术人员和学生,这些都是不可或缺的学习资源。通过阅读和研究这些文档,可以深入了解...
CAN Bootloader协议是一种用于CAN (Controller Area Network) 总线上的引导程序协议,它允许通过CAN总线来刷写固件,实现设备程序的更新或恢复。Bootloader协议为嵌入式设备提供了初始的运行环境,以便在设备启动时...