еЬ®2010еєі4жЬИеПСеЄГзЪДRHEL 6.0 BetaзЙИдЄ≠ пЉМеОїжОЙдЇЖXenпЉМињЩдєЯиЃЄжШѓзђђдЄАдЄ™дЄНеМЕеРЂXen
HypervisorзЪДзЯ•еРНLinuxеПСи°МзЙИпЉМдєЛеЙНжЬЙжК•йБУињЗRed HatжЬЙеПѓиГљдЉЪеЬ®RHEL
6.0дЄ≠зФ®KVMеЃМеЕ®дї£жЫњXenпЉМзО∞еЬ®зЬЛжЭ•дї•еЙНзЪДжґИжБѓдЄАзВєдЄНеБЗгАВKVM жШѓжМЗеЯЇдЇО Linux еЖЕж†ЄзЪДиЩЪжЛЯжЬЇ(Kernel-based
Virtual Machine)гАВеҐЮеК† KVM еИ∞ Linux еЖЕж†ЄжШѓ Linux еПСе±ХзЪДдЄАдЄ™йЗНи¶БйЗМз®ЛзҐСпЉМињЩдєЯжШѓзђђдЄАдЄ™жХіеРИеИ∞ Linux
дЄїзЇњеЖЕж†ЄзЪДиЩЪжЛЯеМЦжКАжЬѓгАВеЬ® KVM ж®°еЮЛдЄ≠пЉМжѓПдЄАдЄ™иЩЪжЛЯжЬЇйГљжШѓдЄАдЄ™зФ± Linux
и∞ГеЇ¶з®ЛеЇПзЃ°зРЖзЪДж†ЗеЗЖињЫз®ЛпЉМдљ†еПѓдї•еЬ®зФ®жИЈз©ЇйЧіеРѓеК®еЃҐжИЈжЬЇжУНдљЬз≥їзїЯгАВдЄАдЄ™жЩЃйАЪзЪД Linux ињЫз®ЛжЬЙдЄ§зІНињРи°Мж®°еЉПпЉЪеЖЕж†ЄеТМзФ®жИЈгАВ KVM
еҐЮеК†дЇЖзђђдЄЙзІНж®°еЉПпЉЪеЃҐжИЈж®°еЉП(жЬЙиЗ™еЈ±зЪДеЖЕж†ЄеТМзФ®жИЈж®°еЉП)гАВ
гААгААKVM жЙАдљњзФ®зЪДжЦєж≥ХжШѓйАЪињЗзЃАеНХеЬ∞еК†иљљеЖЕж†Єж®°еЭЧиАМе∞Ж Linux еЖЕж†ЄиљђжНҐдЄЇдЄАдЄ™з≥їзїЯзЃ°зРЖз®ЛеЇПгАВињЩдЄ™еЖЕж†Єж®°еЭЧеѓЉеЗЇдЇЖдЄАдЄ™еРНдЄЇ
/dev/kvm зЪДиЃЊе§ЗпЉМеЃГеПѓдї•еРѓзФ®еЖЕж†ЄзЪДеЃҐжИЈж®°еЉП(йЩ§дЇЖдЉ†зїЯзЪДеЖЕж†Єж®°еЉПеТМзФ®жИЈж®°еЉП)гАВжЬЙдЇЖ /dev/kvm иЃЊе§ЗпЉМVM
дљњиЗ™еЈ±зЪДеЬ∞еЭАз©ЇйЧізЛђзЂЛдЇОеЖЕж†ЄжИЦињРи°МзЭАзЪДдїїдљХеЕґдїЦ VM зЪДеЬ∞еЭАз©ЇйЧігАВиЃЊе§Зж†С(/dev)дЄ≠зЪДиЃЊе§ЗеѓєдЇОжЙАжЬЙзФ®жИЈз©ЇйЧіињЫз®ЛжЭ•иѓійГљжШѓйАЪзФ®зЪДгАВдљЖжШѓжѓПдЄ™жЙУеЉА
/dev/kvm зЪДињЫз®ЛзЬЛеИ∞зЪДжШѓдЄНеРМзЪДжШ†е∞Д(дЄЇдЇЖжФѓжМБ VM йЧізЪДйЪФз¶ї)гАВKVMеЃЙи£Е KVM
дєЛеРОпЉМжВ®еПѓдї•еЬ®зФ®жИЈз©ЇйЧіеРѓеК®еЃҐжИЈжУНдљЬз≥їзїЯгАВжѓПдЄ™еЃҐжИЈжУНдљЬз≥їзїЯйГљжШѓдЄїжЬЇжУНдљЬз≥їзїЯ(жИЦз≥їзїЯзЃ°зРЖз®ЛеЇП)зЪДдЄАдЄ™еНХдЄ™ињЫз®ЛгАВ еЫЊ 1 жПРдЊЫдЇЖдЄАдЄ™дљњзФ® KVM
ињЫи°МиЩЪжЛЯеМЦзЪДиІЖеЫЊгАВ

еЫЊ 1 KVM еОЯзРЖеЫЊ
гААгААдЄАгАБKVM иЩЪжЛЯжЬЇзЪДзЃ°зРЖеЈ•еЕЈ
гААгААеЗЖз°ЃжЭ•иѓіпЉМKVM дїЕдїЕжШѓ Linux еЖЕж†ЄзЪДдЄАдЄ™ж®°еЭЧгАВзЃ°зРЖеТМеИЫеїЇеЃМжХізЪД KVM иЩЪжЛЯжЬЇпЉМйЬАи¶БжЫіе§ЪзЪДиЊЕеК©еЈ•еЕЈгАВQEMU-KVMпЉЪеЬ®
Linux з≥їзїЯдЄ≠пЉМй¶ЦеЕИжИСдїђеПѓдї•зФ® modprobe еСљдї§еК†иљљ KVM ж®°еЭЧпЉМе¶ВжЮЬзФ® RPM еЃЙи£Е KVM
иљѓдїґеМЕпЉМз≥їзїЯдЉЪеЬ®еРѓеК®жЧґиЗ™еК®еК†иљљж®°еЭЧгАВеК†иљљдЇЖж®°еЭЧеРОпЉМжЙНиГљињЫдЄАж≠•йАЪињЗеЕґдїЦеЈ•еЕЈеИЫеїЇиЩЪжЛЯжЬЇгАВдљЖдїЕжЬЙ KVM
ж®°еЭЧжШѓињЬињЬдЄНе§ЯзЪДпЉМеЫ†дЄЇзФ®жИЈжЧ†ж≥ХзЫіжО•жОІеИґеЖЕж†Єж®°еЭЧеОїеБЪдЇЛжГЕпЉМињШењЕй°їжЬЙдЄАдЄ™зФ®жИЈз©ЇйЧізЪДеЈ•еЕЈгАВеЕ≥дЇОзФ®жИЈз©ЇйЧізЪДеЈ•еЕЈпЉМKVM
зЪДеЉАеПСиАЕйАЙжЛ©дЇЖеЈ≤зїПжИРеЮЛзЪДеЉАжЇРиЩЪжЛЯеМЦиљѓдїґ QEMUгАВQEMU жШѓдЄАдЄ™еЉЇе§ІзЪДиЩЪжЛЯеМЦиљѓдїґпЉМеЃГеПѓдї•иЩЪжЛЯдЄНеРМзЪД CPU жЮДжЮґгАВжѓФе¶ВиѓіеЬ® x86 зЪД
CPU дЄКиЩЪжЛЯдЄАдЄ™ Power зЪД CPUпЉМеєґеИ©зФ®еЃГзЉЦиѓСеЗЇеПѓињРи°МеЬ® Power дЄКзЪДз®ЛеЇПгАВKVM дљњзФ®дЇЖ QEMU зЪДеЯЇдЇО x86
зЪДйГ®еИЖпЉМеєґз®НеК†жФєйА†пЉМ嚥жИРеПѓжОІеИґ KVM еЖЕж†Єж®°еЭЧзЪДзФ®жИЈз©ЇйЧіеЈ•еЕЈ QEMU-KVMгАВжЙАдї• Linux еПСи°МзЙИдЄ≠еИЖдЄЇ еЖЕж†ЄйГ®еИЖзЪД KVM
еЖЕж†Єж®°еЭЧеТМ QEMU-KVM еЈ•еЕЈгАВињЩе∞±жШѓ KVM еТМ QEMU зЪДеЕ≥з≥їгАВ LibvirtгАБvirshгАБvirt-managerпЉЪе∞љзЃ°
QEMU-KVM еЈ•еЕЈеПѓдї•еИЫеїЇеТМзЃ°зРЖ KVM иЩЪжЛЯжЬЇпЉМRedHat дЄЇ KVM еЉАеПСдЇЖжЫіе§ЪзЪДиЊЕеК©еЈ•еЕЈпЉМжѓФе¶В
libvirtгАБlibguestfs з≠ЙгАВеОЯеЫ†жШѓ QEMU еЈ•еЕЈжХИзОЗдЄНйЂШпЉМдЄНжШУдЇОдљњзФ®гАВLibvirt жШѓдЄАе•ЧжПРдЊЫдЇЖе§ЪзІНиѓ≠и®АжО•еП£зЪД
APIпЉМдЄЇеРДзІНиЩЪжЛЯеМЦеЈ•еЕЈжПРдЊЫдЄАе•ЧжЦєдЊњгАБеПѓйЭ†зЪДзЉЦз®ЛжО•еП£пЉМдЄНдїЕжФѓжМБ KVMпЉМиАМдЄФжФѓжМБ Xen з≠ЙеЕґдїЦиЩЪжЛЯжЬЇгАВдљњзФ® libvirtпЉМдљ†еП™йЬАи¶БйАЪињЗ
libvirt жПРдЊЫзЪДеЗљжХ∞ињЮжО•еИ∞ KVM жИЦ Xen еЃњдЄїжЬЇпЉМдЊњеПѓдї•зФ®еРМж†ЈзЪДеСљдї§жОІеИґдЄНеРМзЪДиЩЪжЛЯжЬЇдЇЖгАВLibvirt дЄНдїЕжПРдЊЫдЇЖ
APIпЉМињШиЗ™еЄ¶дЄАе•ЧеЯЇдЇОжЦЗжЬђзЪДзЃ°зРЖиЩЪжЛЯжЬЇзЪДеСљдї§-- virshпЉМдљ†еПѓдї•йАЪињЗдљњзФ® virsh еСљдї§жЭ•дљњзФ® libvirt
зЪДеЕ®йГ®еКЯиГљгАВдљЖжЬАзїИзФ®жИЈжЫіжЄіжЬЫзЪДжШѓеی嚥зФ®жИЈзХМйЭҐпЉМињЩе∞±жШѓ virt-managerгАВдїЦжШѓдЄАе•ЧзФ® python
зЉЦеЖЩзЪДиЩЪжЛЯжЬЇзЃ°зРЖеی嚥зХМйЭҐпЉМзФ®жИЈеПѓдї•йАЪињЗеЃГзЫіиІВеЬ∞жУНдљЬдЄНеРМзЪДиЩЪжЛЯжЬЇгАВVirt-manager е∞±жШѓеИ©зФ® libvirt зЪД API еЃЮзО∞зЪДгАВ
 
гААгААдЇМгАБ еЃЙи£ЕйЕНзљЃKVM зЫЄеЕ≥иљѓдїґ
гААгАА1 з≥їзїЯи¶Бж±ВпЉЪ
гААгААе§ДзРЖеЩ®
йЬАж±В:йЬАи¶БдЄАеП∞еПѓдї•ињРи°МжЬАжЦ∞linuxеЖЕж†ЄзЪДIntelе§ДзРЖеЩ®
(еРЂVTиЩЪжЛЯеМЦжКАжЬѓ)жИЦAMDе§ДзРЖеЩ®
(еРЂSVMеЃЙеЕ®иЩЪжЛЯжЬЇжКАжЬѓзЪДAMDе§ДзРЖеЩ®
, дєЯеПЂAMD-V)гАВеПѓдї•дљњзФ®е¶ВдЄЛеСљдї§ж£АжЯ•пЉЪ
гААгАА# egrep (vmx|svm) --color=always /proc/cpuinfo
гААгААflags : fpu vme de pse tsc msr pae mce cx8 apic sep mtrr pge mca
cmov pat pse36 clflush mmx fxsr sse sse2 ht syscall nx mmxext fxsr_opt
rdtscp lm 3dnowext 3dnow pni cx16 lahf_lm cmp_legacy svm extapic
cr8_legacy misalignsse
гААгААflags : fpu vme de pse tsc msr pae mce cx8 apic sep mtrr pge mca
cmov pat pse36 clflush mmx fxsr sse sse2 ht syscall nx mmxext fxsr_opt
rdtscp lm 3dnowext 3dnow pni cx16 lahf_lm cmp_legacy svm extapic
cr8_legacy misalignsse
гААгААе¶ВжЮЬиЊУеЗЇзЪДзїУжЮЬеМЕеРЂ vmxпЉМеЃГжШѓ Intelе§ДзРЖеЩ®
иЩЪжЛЯжЬЇжКАжЬѓж†ЗењЧ;е¶ВжЮЬеМЕеРЂ svmпЉМеЃГжШѓ AMDе§ДзРЖеЩ®
иЩЪжЛЯжЬЇжКАжЬѓж†ЗењЧ;гАВе¶ВжЮЬдљ†зФЪдєИйГљеЊЧдЄНеИ∞пЉМйВ£еЇФдљ†зЪДз≥їзїЯеєґж≤°жЬЙжФѓжМБиЩЪжЛЯеМЦзЪДе§ДзРЖ пЉМдЄНиГљдљњзФ®kvmгАВеП¶е§ЦLinux еПСи°МзЙИжЬђењЕй°їеЬ®64bitзОѓеҐГдЄ≠жЙНиГљдљњзФ®KVMгАВ
гААгАА2 еЃЙи£Еиљѓдїґ
гААгААеЃЙи£ЕKVMж®°еЭЧгАБзЃ°зРЖеЈ•еЕЈеТМlibvirt (дЄАдЄ™еИЫеїЇиЩЪжЛЯжЬЇзЪДеЈ• еЕЈ)пЉМжИСдїђдљњзФ®еСљдї§и°МеЃЙи£ЕпЉЪ
гААгАА#yum install kvm virt-manager libvirt
гААгАА#/sbin/service libvirtd start
гААгАА3 з°ЃеЃЪж≠£з°ЃеК†иљљkvmж®°еЭЧ
гААгААињРи°МеСљдї§ lsmod | grep kvm ж£АжЯ• KVM ж®°еЭЧжШѓеР¶жИРеКЯеЃЙи£ЕгАВе¶ВжЮЬзїУжЮЬз±їдЉЉдЇОдї•дЄЛиЊУеЗЇпЉМйВ£дєИ KVM ж®°еЭЧеЈ≤жИРеКЯеЃЙи£ЕпЉЪ
гААгАА# lsmod | grep kvm
гААгААkvm_amd 69416 1
гААгААkvm 226208 2 ksm,kvm_amd
гААгАА4 ж£АжЯ•KVMжШѓеР¶жИРеКЯеЃЙи£Е
гААгААvirsh -c qemu:///system list
гААгААе∞ЖдЉЪжШЊз§Їе¶ВдЄЛзїУжЮЬ:
гААгАА# virsh -c qemu:///system list
гААгААId Name State
гААгАА----------------------------------
гААгААе¶ВжЮЬеЬ®ињЩйЗМжШЊз§ЇзЪДжШѓдЄАдЄ™йФЩиѓѓзЪДдњ°жБѓпЉМиѓіжШОжЬЙдЇЫдЄЬи•њеЗЇзО∞дЇЖйЧЃйҐШгАВ
 
гААгААдЄЙгАБ дљњзФ®virt-managerеїЇзЂЛдЄАдЄ™KVMиЩЪжЛЯжЬЇ
гААгААvirt-manager жШѓеЯЇдЇО libvirt зЪДеЫЊеГПеМЦиЩЪжЛЯжЬЇзЃ°зРЖиљѓдїґпЉМиѓЈж≥®жДПдЄНеРМзЪДеПСи°МзЙИдЄК virt-manager
зЪДзЙИжЬђеПѓиГљдЄНеРМпЉМеی嚥зХМйЭҐеТМжУНдљЬжЦєж≥ХдєЯеПѓиГљдЄНеРМгАВжЬђжЦЗдљњзФ®дЇЖзЇҐеЄљ6дЉБдЄЪзЙИзЪД
virt-manager-0.8.4-8гАВеИЫеїЇKVMиЩЪжЛЯжЬЇжЬАзЃАеНХзЪДжЦєж≥ХжШѓйАЪињЗvirt-managerжО•еП£гАВдїОжОІеИґеП∞з™ЧеП£еРѓеК®ињЩдЄ™еЈ•еЕЈпЉМдїОrootиЇЂ
дїљиЊУеЕ•virt-managerеСљдї§пЉМзВєеЗїfileиПЬеНХзЪД"жЦ∞еїЇ"йАЙй°єvirt-managerжО•еП£зХМйЭҐе¶ВеЫЊ2гАВ
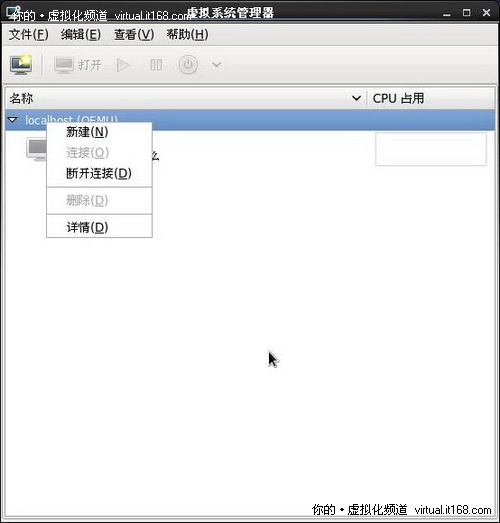
еЫЊ2 virt-managerжО•еП£зХМйЭҐ
гААгААvirt-managerжШЊз§ЇдЄ§зІНиЩЪжЛЯеМЦжЦєж≥ХпЉЪQemu/KVMжИЦиАЕXenпЉМињЩйЗМеєґйАЙжЛ©Qemu/KVMдљЬдЄЇhypervisorе¶ВеЫЊ3гАВ
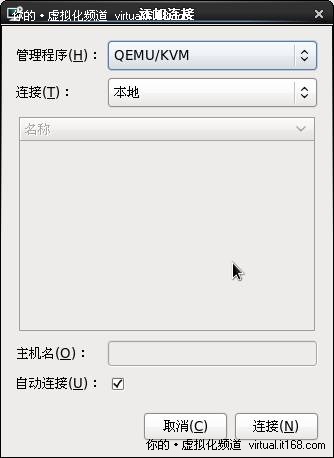
еЫЊ3 йАЙжЛ©Qemu/KVMдљЬдЄЇhypervisor
гААгААзЇҐеЄљдЉБдЄЪзЙИ 6.0зЫЄжѓФдЄКдЄ™зЙИжЬђзЃАеМЦдЇЖиЩЪжЛЯеМЦйЕНзљЃж≠•й™§еИЖжИРдЇФж≠•пЉЪ
гААгАА1 йАЙжЛ©иЩЪжЛЯжЬЇеРНзІ∞еТМжМЗеЃЪдЄАзІНеЃЙи£ЕжЦєж≥ХпЉЪйАЪињЗзљСзїЬеЃЙи£ЕжЬНеК°еЩ®
жИЦиАЕжЬђеЬ∞CD/DVDй©±еК®еМЕжЛђжЬђеЬ∞ISOжЦЗдїґ(ињЩзІНжЦєж≥ХжЫізЃАеНХ)гАВ
гААгААеП¶е§ЦжЦ∞зЙИжЬђињШжФѓжМБзљСзїЬеРѓеК®еТМеѓЉеЕ•дєЛеЙНеїЇзЂЛзЪДиЩЪжЛЯжЬЇз£БзЫШе¶ВеЫЊ4гАВ

еЫЊ4йАЙжЛ©иЩЪжЛЯжЬЇеРНзІ∞еТМжМЗеЃЪдЄАзІНеЃЙи£ЕжЦєж≥Х
гААгАА2 иЊУеЕ•жЬђеЬ∞ISOжЦЗдїґиЈѓеЊДеТМжЦЗдїґеРНе¶ВеЫЊ5

еЫЊ5 иЊУеЕ•жЬђеЬ∞ISOжЦЗдїґиЈѓеЊДеТМжЦЗдїґеРНйАЙжЛ©жЬђеЬ∞ISOжЦЗдїґ
гААгАА3иЃЊзљЃиЩЪжЛЯжЬЇдљњзФ®зЪДеЖЕе≠Ш
еЃєйЗПеТМе§ДзРЖеЩ®
жХ∞йЗПе¶ВеЫЊ6гАВ
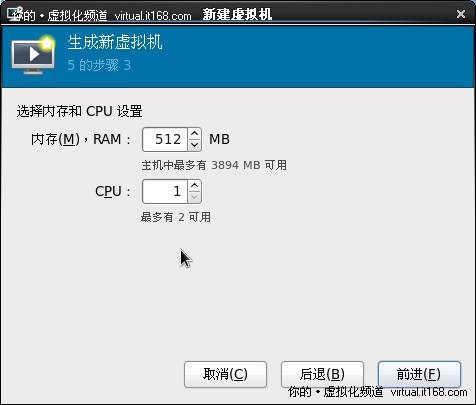
еЫЊ6 иЃЊзљЃиЩЪжЛЯжЬЇдљњзФ®зЪДеЖЕе≠Ш
еЃєйЗПеТМе§ДзРЖеЩ®
жХ∞йЗП
гААгАА4йЕНзљЃиЩЪжЛЯжЬЇзЪДе≠ШеВ®жЦєж≥ХгАВеѓєдЇОе≠ШеВ®еРОзЂѓжЬЙдЄ§зІНйАЙжЛ©пЉЪзЙ©зРЖе≠ШеВ®иЃЊе§ЗжИЦиАЕдљњзФ®дєЛеЙНеїЇзЂЛз£БзЫШжЦЗдїґгАВе¶ВжЮЬеЗЇдЇОзЃАеНХжµЛиѓХпЉМеИЫеїЇжЦЗдїґдљЬдЄЇе≠ШеВ®еРОзЂѓгАВељУеИЫеїЇиЩЪжЛЯз£БзЫШжЧґпЉМйїШиЃ§зЪД10GBе¶ВеЫЊ7гАВ
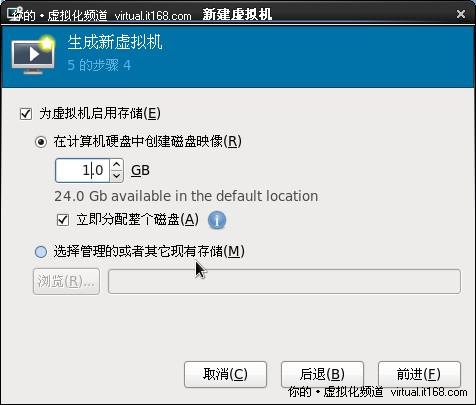
еЫЊ7 еѓєдЇОзЃАжШУеЃЙи£ЕпЉМйАЙжЛ©дЄАдЄ™жЦЗдїґдљЬдЄЇе≠ШеВ®е§ЗдїљеРОзЂѓ
гААгАА5 зљСзїЬйЕНзљЃпЉМеЬ®ињЩйЗМйАЙжЛ©NATжЦєеЉПгАВдЄЛйЭҐжЬАеРОеПѓзЬЛеИ∞иЩЪжЛЯжЬЇдњ°жБѓзЪДж¶ВеЖµе¶ВеЫЊ8гАВ
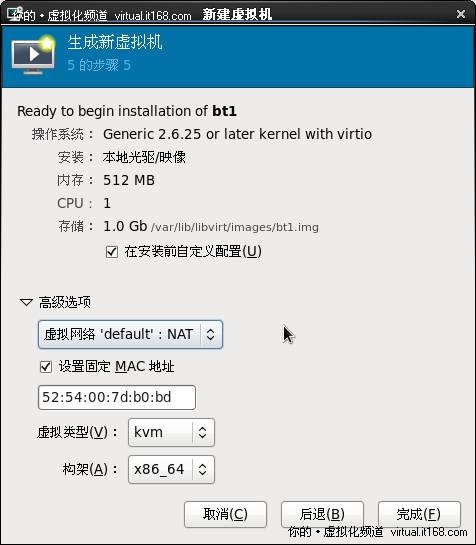
еЫЊ8 иЩЪжЛЯжЬЇдњ°жБѓ
гААгААиѓіжШОпЉЪ"еЬ®еЃЙи£ЕеЙНиЗ™еЃЪдєЙйЕНзљЃ"йАЙй°єжПРдЊЫдЄАдЇЫйЂШзЇІиЗ™еЃЪдєЙйЕНзљЃгАВеЬ®жЬАеРОз™ЧеП£зВєеЗїеЃМжИРжМЙйТЃеРОпЉМеЃЙи£Ее∞ЖиЗ™еК®еЉАеРѓгАВињЗз®ЛиЈЯеє≥жЧґеЃЙи£ЕжЩЃйАЪжУНдљЬз≥їзїЯдЄАж†ЈпЉМдЄНеЖН
иµШињ∞пЉМдЄНдєЕдєЛеРОпЉМдљ†зЪДзђђдЄАеП∞KVMиЩЪжЛЯжЬЇзЪДеЃҐжИЈжЬЇе∞±еРѓеК®еєґињРи°МдЇЖгАВиѓіжШОињЩйЗМзђФиАЕеЬ®KVM иЩЪжЛЯжЬЇдЄ≠ињРи°МзЪДжШѓдЄАдЄ™linux
еПСи°МзЙИжЬђBackTrackгАВBackTrackжШѓз≤ЊзЃАзЙИLinuxз≥їзїЯдї•еПКз†іиІ£иљѓдїґгАВеПѓдї•еИ©зФ®еЕґз†іиІ£иљѓдїґ
жЭ•жРЬеѓїеТМз†іиІ£жЧ†зЇњзљСзїЬзЪДеѓЖз†БгАВињРи°МзХМйЭҐе¶ВеЫЊ9гАВ
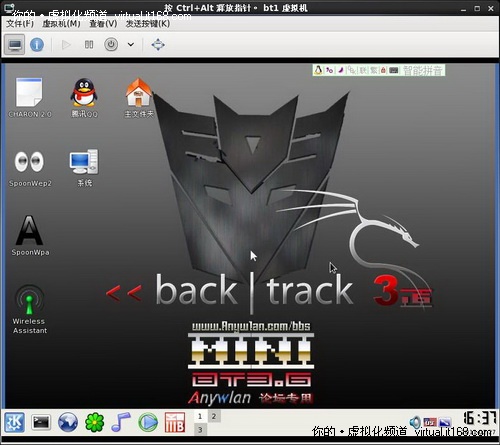
еЫЊ9 KVMиЩЪжЛЯжЬЇзЪДеЃҐжИЈжЬЇ
 
 
гААгААеЫЫгАБ дљњзФ®virshжЙІи°МйЂШзЇІзЃ°зРЖдїїеК°
гААгААvirshзЪДе≠¶дє†жЫ≤зЇњйЭЮеЄЄйЩ°е≥≠гАВдљЖжШѓеП¶дЄАзІНеПѓйАЙжЦєеЉПvirt-managerзЪДзЉЇйЩЈињШеЊИжШОжШЊпЉМvirt-managerйЬАи¶БеЬ®з≥їзїЯеЖЕињРи°МпЉМињЩдЉЪжµ™иієиµДжЇРеєґдЄЇеИЂжЬЙзЫЃзЪДзЪДдЇЇжПРдЊЫйҐЭе§ЦзЪДињЫжФїзВєгАВvirt-managerзЪДеП¶дЄАе§ІзЉЇзВєжШѓйЬАи¶БйАЪињЗеی嚥壕дљЬзЂЩ
ињРи°МињЬз®ЛжО•еЕ•зЪДжЦєеЉПпЉМжЙНиГљеѓєжЬНеК°еЩ®
дЄК
зЪДиЩЪжЛЯжЬЇињЫи°МзЃ°зРЖгАВиАМvirshеИЩеПѓдї•йАЪињЗеСљдї§и°МжЙІи°МеРДзІНеРДж†ЈзЪДзЃ°зРЖдїїеК°гАВе¶ВеЕИеЙНжЙАиѓіvirshйАЪињЗдЄїеСљдї§еТМе≠РеСљдї§зЃ°зРЖжѓПдЄ™иЩЪжЛЯжЬЇеКЯиГљгАВи¶Бе≠¶дє†virsh
еЊИеЫ∞йЪЊпЉМеЫ†дЄЇжЬЙиЃЄе§ЪеСљдї§гАВvirshйАЪињЗдЄїеСљдї§еТМе≠РеСљдї§зЃ°зРЖжѓПдЄ™иЩЪжЛЯжЬЇеКЯиГљгАВи¶БжЯ•зЬЛжЙАжЬЙеСљдї§пЉМиЊУеЕ•virsh
helpгАВдљ†еПѓиГљеПСзО∞е§ІйЗПеСљдї§пЉМдЄНињЗжѓПдЄ™еСљдї§йГљжЬЙеЄЃеК©жМЗеНЧпЉМеП™йЬАи¶БиЊУеЕ•virsh helpгАВдЊЛе¶ВдљњзФ®virsh help
uriпЉМе∞±еПѓдї•зЬЛеИ∞жЙАжЬЙеЕ≥дЇОvirsh uriеСљдї§зЪДеЄЃеК©гАВдЄНињЗдЄАжЧ¶дљ†иОЈеЊЧдЄАдЄ™еЊИеЉЇзЪДеСљдї§еКЯиГљпЉМе∞±иГљиОЈеЊЧжФґзЫКгАВдЄЛйЭҐжШѓvirshеСљдї§еЃЮдЊЛпЉЪ
гААгАА1еИЫеїЇдЄАдЄ™еРНзІ∞жШѓmyWin7зЪДwindows 7иЩЪжЛЯжЬЇ
гААгААдљњзФ®еСљдї§пЉЪ
гААгАА# yum install virt-viewer
гААгААvirt-install --name myWin7 --hvm --ram 1024 --disk
path=/tmp/win7.img,size=10 --network network:default --vnc --os-variant
vista --cdrom /dev/hda
гААгААStarting install...
гААгААCreating storage file... | 10.0 GB 00:00
гААгААCreating domain... | 0 B 00:00
гААгААDomain installation still in progress. Waiting for installation to complete.
гААгААдЄЛйЭҐеЃЙи£Ее∞ЖиЗ™еК®еЉАеРѓгАВињЗз®ЛиЈЯеє≥жЧґеЃЙи£ЕжЩЃйАЪжУНдљЬз≥їзїЯдЄАж†ЈпЉМдЄНеЖНиµШињ∞гАВињРи°МзХМйЭҐе¶ВеЫЊ10гАВ
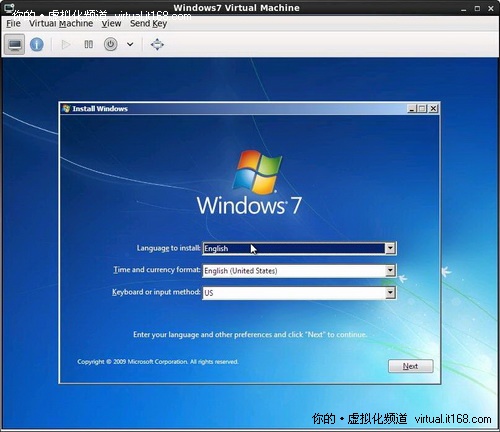
еЫЊ10 еЃЙи£Еwindows 7
гААгАА(2)жЯ•зЬЛиЩЪжЛЯжЬЇ
гААгАА# virsh -c qemu:///system list
гААгААId еРНзІ∞ зКґжАБ
гААгАА----------------------------------
гААгАА1 myWin7 running
гААгАА(3)еЕ≥йЧ≠иЩЪжЛЯжЬЇ
гААгАА#virsh shutdown myWin7
гААгАА(4)ељїеЇХжСІжѓБдЄАдЄ™иЩЪжЛЯжЬЇ
гААгАА#virsh destroy myWin7
 
 
http://www.turbolinux.com.cn/turbo/wiki/doku.php?id=start
еИЖдЇЂеИ∞пЉЪ





зЫЄеЕ≥жО®иНР
зЇҐеЄљдЉБдЄЪзЙИ6.0KVMиЩЪжЬЇеЃЮжИШжФїзХ•пЉИеЫЊжЦЗпЉЙ.doc
зЇҐеЄљдЉБдЄЪзЙИ_6.0_KVMиЩЪжЬЇеЃЮжИШжФїзХ•еЫЊжЦЗ
е∞СеДњзЉЦз®Лscratchй°єзЫЃжЇРдї£з†БжЦЗдїґж°ИдЊЛзі†жЭР-зїЭеЬ∞ж±ВзФЯ.zip
еµМеЕ•еЉПеЕЂиВ°жЦЗйЭҐиѓХйҐШеЇУиµДжЦЩзЯ•иѓЖеЃЭеЕЄ-жЦЗжАЭеИЫжЦ∞йЭҐиѓХйҐШ2010-04-08.zip
дЄАзІНеЯЇдЇОеЙ™еИЗж≥ҐеТМзЙєеЊБдњ°жБѓж£АжµЛзЪД姙йШ≥жЦСзВєеЫЊиЮНеРИзЃЧж≥Х.pdf
еЖЕеЃєж¶Ви¶БпЉЪжЬђжЦЗиѓ¶зїЖдїЛзїНдЇЖеєґиБФеЮЛжЬЙжЇРзФµеКЫжї§ж≥ҐеЩ®пЉИAPFпЉЙеЬ®Matlab/SimulinkзОѓеҐГдЄЛзЪДдїњзЬЯз†Фз©ґгАВдЄїи¶БеЖЕеЃєжґµзЫЦдЄЙдЄ™еЕ≥йФЃжКАжЬѓзВєпЉЪдЄАжШѓdqдЄОќ±ќ≤еЭРж†Зз≥їдЄЛзЪДи∞Рж≥ҐеТМжЧ†еКЯж£АжµЛпЉМеИ©зФ®dqеПШжНҐеТМFBDжКАжЬѓеЃЮзО∞еЃЮжЧґж£АжµЛпЉЫдЇМжШѓдЄ§зЫЄжЧЛиљђеЭРж†Зз≥їпЉИdqпЉЙдЄОдЄ§зЫЄйЭЩж≠ҐеЭРж†Зз≥їпЉИќ±ќ≤пЉЙдЄЛзЪДPIжОІеИґпЉМйАЪињЗи∞ГжХіжѓФдЊЛеТМзІѓеИЖзОѓиКВеЃЮзО∞з≤ЊеЗЖжОІеИґпЉЫдЄЙжШѓSVPWMи∞ГеИґжЦєеЉПзЪДеЇФзФ®пЉМйАЪињЗдЉШеМЦеЉАеЕ≥жЧґеЇПжПРеНЗз≥їзїЯжХИзОЗеТМжАІиГљгАВжЦЗдЄ≠ињШжПРдЊЫдЇЖиѓ¶зїЖзЪДдїњзЬЯдїЛзїНжЦЗж°£пЉМеМЕжЛђж®°еЮЛжР≠еїЇгАБеПВжХ∞иЃЊеЃЪдї•еПКзїУжЮЬеИЖжЮРгАВ йАВеРИдЇЇзЊ§пЉЪдїОдЇЛзФµеКЫзФµе≠РгАБиЗ™еК®еМЦжОІеИґйҐЖеЯЯзЪДз†Фз©ґдЇЇеСШеТМжКАжЬѓдЇЇеСШпЉМе∞§еЕґжШѓеѓєзФµеКЫжї§ж≥ҐеЩ®дїњзЬЯжДЯеЕіиґ£зЪДиѓїиАЕгАВ дљњзФ®еЬЇжЩѓеПКзЫЃж†ЗпЉЪйАВзФ®дЇОйЬАи¶БжЈ±еЕ•дЇЖиІ£еєґиБФеЮЛAPFеЈ•дљЬеОЯзРЖеТМеЃЮзО∞жЦєеЉПзЪДз†Фз©ґдЇЇеСШпЉМжЧ®еЬ®йАЪињЗдїњзЬЯеЈ•еЕЈжОМжП°и∞Рж≥ҐеТМжЧ†еКЯж£АжµЛгАБPIжОІеИґеПКSVPWMи∞ГеИґзЪДеЕЈдљУеЇФзФ®гАВ еЕґдїЦиѓіжШОпЉЪжЬђжЦЗдЄНдїЕжПРдЊЫдЇЖзРЖиЃЇзЯ•иѓЖпЉМињШзїУеРИдЇЖеЃЮйЩЕжУНдљЬж≠•й™§пЉМдљњиѓїиАЕиГље§ЯйАЪињЗдїњзЬЯж®°еЮЛеК†жЈ±еѓєAPFзЪДзРЖиІ£гАВ
Arduino KEYеЃЮй™МдЊЛз®ЛпЉМеЉАеПСжЭњпЉЪж≠£зВєеОЯе≠РEPS32S3пЉМжЬђдЇЇдЄїй°µжЬЙиѓ¶зїЖеЃЮй™МиѓіжШОеПѓдЊЫеПВиАГгАВ
еµМеЕ•еЉПеЕЂиВ°жЦЗйЭҐиѓХйҐШеЇУиµДжЦЩзЯ•иѓЖеЃЭеЕЄ-еµМеЕ•еЉПCиѓ≠и®АйЭҐиѓХйҐШж±ЗжАї(66й°µеЄ¶з≠Фж°И).zip
.archivetempdebug.zip
еµМеЕ•еЉПз≥їзїЯеЉАеПС_CH551еНХзЙЗжЬЇ_USB_HIDе§НеРИиЃЊе§Зж®°жЛЯ_еЯЇдЇОCH551еНХзЙЗжЬЇзЪДUSBйФЃзЫШйЉ†ж†Зе§НеРИиЃЊе§Зж®°жЛЯеЩ®й°єзЫЃ_зФ®дЇОйАЪињЗCH551еЊЃжОІеИґеЩ®ж®°жЛЯUSBйФЃзЫШеТМйЉ†ж†ЗиЊУеЕ•иЃЊе§З_еЃЮзО∞з°ђ
е∞СеДњзЉЦз®Лscratchй°єзЫЃжЇРдї£з†БжЦЗдїґж°ИдЊЛзі†жЭР-еЙСеЃҐеЖ≤еИЇ.zip
е∞СеДњзЉЦз®Лscratchй°єзЫЃжЇРдї£з†БжЦЗдїґж°ИдЊЛзі†жЭР-зБЂељ±.zip
еЖЕеЃєж¶Ви¶БпЉЪжЬђжЦЗиѓ¶зїЖдїЛзїНдЇЖдЄ§жЮБеЉПеНХзЫЄеЕЙдЉПеєґзљСз≥їзїЯзЪДзїДжИРеПКеЕґдїњзЬЯдЉШеМЦжЦєж≥ХгАВеЙНзЇІйЗЗзФ®BoostзФµиЈѓзїУеРИжЙ∞еК®иІВеѓЯж≥Х(P&O)ињЫи°МжЬАе§ІеКЯзОЗзВєиЈЯиЄ™(MPPT)пЉМе∞ЖеЕЙдЉПжЭњиЊУеЗЇзФµеОЛжПРеНЗиЗ≥еєґзљСжЙАйЬАж∞іеє≥пЉЫеРОзЇІеИ©зФ®еЕ®ж°•йАЖеПШеК†LеЮЛжї§ж≥Ґдї•еПКзФµеОЛе§ЦзОѓзФµжµБеЖЕзОѓжОІеИґпЉМз°ЃдњЭеєґзљСзФµжµБдЄОзФµзљСзФµеОЛеРМйҐСеРМзЫЄпЉМеЃЮзО∞йЂШжХИз®≥еЃЪзЪДеєґзљСдЉ†иЊУгАВжЦЗдЄ≠ињШжПРдЊЫдЇЖеЕЈдљУзЪДдїњзЬЯжКАеЈІпЉМе¶ВеЉАеЕ≥йҐСзОЗиЃЊзљЃгАБLжї§ж≥ҐеПВжХ∞иЃ°зЃЧеТМеєґзљСзЮђйЧіиљѓеРѓеК®з≠ЙпЉМжЬАзїИеЃЮзО∞дЇЖ98.2%зЪДз≥їзїЯжХИзОЗеТМдљОдЇО0.39%зЪДжАїи∞Рж≥Ґе§±зЬЯзОЗ(THD)гАВ йАВеРИдЇЇзЊ§пЉЪдїОдЇЛеЕЙдЉПеєґзљСз≥їзїЯз†Фз©ґгАБиЃЊиЃ°еТМеЉАеПСзЪДжКАжЬѓдЇЇеСШпЉМзЙєеИЂжШѓеѓєBoostзФµиЈѓгАБMPPTзЃЧж≥ХгАБйАЖеПШжКАжЬѓеТМеПМзОѓжОІеИґз≥їзїЯжДЯеЕіиґ£зЪДеЈ•з®ЛеЄИгАВ дљњзФ®еЬЇжЩѓеПКзЫЃж†ЗпЉЪйАВзФ®дЇОеЄМжЬЫжЈ±еЕ•дЇЖиІ£дЄ§жЮБеЉПеНХзЫЄеЕЙдЉПеєґзљСз≥їзїЯзЪДеЈ•дљЬеОЯзРЖеТМжКАжЬѓзїЖиКВзЪДз†Фз©ґдЇЇеСШеТМеЈ•з®ЛеЄИгАВзЫЃж†ЗжШѓеЬ®еЃЮйЩЕй°єзЫЃдЄ≠еЇФзФ®ињЩдЇЫзРЖиЃЇеТМжКАжЬѓпЉМжПРйЂШеЕЙдЉПеєґзљСз≥їзїЯзЪДжХИзОЗеТМз®≥еЃЪжАІгАВ еЕґдїЦиѓіжШОпЉЪжЦЗдЄ≠жПРдЊЫзЪДдїњзЬЯжКАеЈІеТМдЉ™дї£з†БжЬЙеК©дЇОиѓїиАЕжЫіе•љеЬ∞зРЖиІ£еТМеЃЮзО∞зЫЄеЕ≥зЃЧж≥ХпЉМеЬ®еЃЮиЈµдЄ≠дЄНжЦ≠дЉШеМЦз≥їзїЯжАІиГљгАВеРМжЧґпЉМж≥®жДПзФµзљСзФµеОЛиЈМиРљжЧґењЂйАЯеИЗжНҐеИ∞е≠§е≤Ыж®°еЉПзЪДйЬАж±ВпЉМз°ЃдњЭз≥їзїЯзЪДеЃЙеЕ®жАІеТМеПѓйЭ†жАІгАВ
зЯҐйЗПиЊєзХМпЉМи°МжФњеМЇеЯЯиЊєзХМпЉМз≤Њз°ЃеИ∞дє°йХЗи°ЧйБУпЉМеПѓзЫіжО•еѓЉеЕ•arcgisдљњзФ®
еµМеЕ•еЉПеЕЂиВ°жЦЗйЭҐиѓХйҐШеЇУиµДжЦЩзЯ•иѓЖеЃЭеЕЄ-еµМеЕ•еЉПcйЭҐиѓХ.zip
еµМеЕ•еЉПеЕЂиВ°жЦЗйЭҐиѓХйҐШеЇУиµДжЦЩзЯ•иѓЖеЃЭеЕЄ-I2CжАїзЇњ.zip
еЖЕеЃєж¶Ви¶БпЉЪжЬђжЦЗиѓ¶зїЖдїЛзїНдЇЖдЄЙзІНж≥®жµЖж®°еЮЛвАФвАФйЪПжЬЇи£ВйЪЩзљСзїЬж≥®жµЖж®°еЮЛгАБеЯЇдЇОдЄ§зЫЄиЊЊи•њеЃЪеЊЛзЪДж≥®жµЖж®°еЮЛгАБеЯЇдЇОе±ВжµБеТМж∞іеє≥йЫЖзЪДж≥®жµЖжЙ©жХ£ж®°еЮЛгАВй¶ЦеЕИпЉМйЪПжЬЇи£ВйЪЩзљСзїЬж≥®жµЖж®°еЮЛеЯЇдЇОеЬ∞иі®е≠¶еОЯзРЖпЉМж®°жЛЯи£ВйЪЩзљСзїЬеПСиВ≤зЪДеЃЮйЩЕеЬ∞иі®жГЕеЖµпЉМеЬ®дЄНеРМж≥®жµЖеОЛеКЫдЄЛињЫи°Мж≥®жµЖдљЬдЄЪпЉМдї•еҐЮеЉЇеЬ∞еЯЇз®≥еЃЪжАІеТМжПРйЂШжЙњиљљиГљеКЫгАВеЕґжђ°пЉМеЯЇдЇОдЄ§зЫЄиЊЊи•њеЃЪеЊЛзЪДж≥®жµЖж®°еЮЛеИ©зФ®жХ∞е≠¶еЕђеЉПж®°жЛЯи£ВйЪЩзљСзїЬдЄ≠зЪДжµБдљУиЊУйАБињЗз®ЛпЉМйАВзФ®дЇОи£ВйЪЩзљСзїЬеЬ∞иі®жЭ°дїґдЄЛзЪДж≥®жµЖжХИжЮЬеИЖжЮРгАВжЬАеРОпЉМеЯЇдЇОе±ВжµБеТМж∞іеє≥йЫЖзЪДж≥®жµЖжЙ©жХ£ж®°еЮЛйАЪињЗеЉХеЕ•е±ВжµБзЙєжАІеТМж∞іеє≥йЫЖжЦєж≥ХпЉМжЫіеЗЖз°ЃеЬ∞ж®°жЛЯж≥®жµЖињЗз®ЛдЄ≠зЪДжЙ©жХ£ињЗз®ЛгАВжЦЗдЄ≠ињШиЃ®иЃЇдЇЖдЄНеРМж≥®жµЖеОЛеКЫеѓєж≥®жµЖжХИжЮЬзЪДељ±еУНпЉМеєґжПРеЗЇдЇЖдЉШеМЦеїЇиЃЃгАВ йАВеРИдЇЇзЊ§пЉЪдїОдЇЛе≤©еЬЯеЈ•з®ЛгАБеЬ∞еЯЇеК†еЫЇз≠ЙзЫЄеЕ≥йҐЖеЯЯзЪДеЈ•з®ЛеЄИеТМжКАжЬѓдЇЇеСШгАВ дљњзФ®еЬЇжЩѓеПКзЫЃж†ЗпЉЪвС†еЄЃеК©еЈ•з®ЛеЄИйАЙжЛ©еРИйАВзЪДж≥®жµЖж®°еЮЛеТМж≥®жµЖеОЛеКЫпЉЫвС°дЄЇеЃЮйЩЕеЈ•з®Лй°єзЫЃжПРдЊЫзРЖиЃЇжФѓжМБеТМжКАжЬѓжМЗеѓЉпЉЫвСҐжПРеНЗеЬ∞еЯЇеК†еЫЇзЪДжХИжЮЬеТМжХИзОЗгАВ еЕґдїЦиѓіжШОпЉЪжЦЗзЂ†еЉЇи∞ГдЇЖеЬ®еЃЮйЩЕеЇФзФ®дЄ≠йЬАи¶БзїУеРИеЬ∞иі®жЭ°дїґгАБи£ВйЪЩзљСзїЬзЙєзВєз≠ЙеЫ†зі†ињЫи°МзїЉеРИеИЖжЮРпЉМдї•иЊЊеИ∞жЬАдљ≥ж≥®жµЖжХИжЮЬгАВеРМжЧґпЉМйЉУеК±дЄНжЦ≠еИЫжЦ∞ж≥®жµЖеЈ•иЙЇеТМжЦєж≥ХпЉМдї•жї°иґ≥жЧ•зЫКеҐЮйХњзЪДеЬ∞еЯЇеК†еЫЇйЬАж±ВгАВ
еЖЕеЃєж¶Ви¶БпЉЪжЬђжЦЗиѓ¶зїЖжѓФиЊГдЇЖCOMSOL Multiphysicsиљѓдїґ5.5еТМ6.0зЙИжЬђеЬ®ж®°жЛЯArж£ТжЭњз≤ЧйАЪйБУжµБж≥®жФЊзФµзО∞и±°жЦєйЭҐзЪДеЉВеРМгАВйЗНзВєжОҐиЃ®дЇЖдЄНеРМзЙИжЬђеЬ®е§ДзРЖзФµе≠РеѓЖеЇ¶гАБзФµе≠РжЄ©еЇ¶гАБзФµеЬЇеЉЇеЇ¶дї•еПКдЄЙзїіиІЖеЫЊз≠ЙжЦєйЭҐзЪДдЉШзЉЇзВєгАВжЦЗдЄ≠дЄНдїЕдїЛзїНдЇЖеРДзЙИжЬђзЙєжЬЙзЪДжУНдљЬжЦєеЉПеТМжКАжЬѓзЙєзВєпЉМињШжПРдЊЫдЇЖеЕЈдљУзЪДдї£з†БеЃЮдЊЛжЭ•е±Хз§Їе¶ВдљХињЫи°Мз≤Њз°ЃзЪДдїњзЬЯиЃЊзљЃгАВж≠§е§ЦпЉМжЦЗзЂ†ињШиЃ®иЃЇдЇЖзљСж†ЉеИТеИЖгАБдЄЙзїіжХ∞жНЃжПРеПЦеТМзФµеЬЇеЉЇеЇ¶еРОе§ДзРЖз≠ЙжЦєйЭҐзЪДжКАжЬѓйЪЊзВєеПКеЕґиІ£еЖ≥жЦєж°ИгАВ йАВеРИдЇЇзЊ§пЉЪдїОдЇЛз≠Йз¶їе≠РдљУзЙ©зРЖз†Фз©ґзЪДдЄУдЄЪдЇЇе£ЂпЉМе∞§еЕґжШѓзЖЯжВЙCOMSOL MultiphysicsиљѓдїґеєґеЄМжЬЫжЈ±еЕ•дЇЖиІ£еЕґжЬАжЦ∞зЙєжАІзЪДз†Фз©ґдЇЇеСШгАВ дљњзФ®еЬЇжЩѓеПКзЫЃж†ЗпЉЪеЄЃеК©зФ®жИЈйАЙжЛ©еРИйАВзЪДCOMSOLзЙИжЬђињЫи°МйЂШжХИгАБз≤Њз°ЃзЪДз≠Йз¶їе≠РдљУдїњзЬЯз†Фз©ґпЉМзЙєеИЂжШѓеЬ®е§ДзРЖе§НжЭВзЪДArж£ТжЭњз≤ЧйАЪйБУжµБж≥®жФЊзФµзО∞и±°жЧґжПРдЊЫжМЗеѓЉгАВ еЕґдїЦиѓіжШОпЉЪжЦЗзЂ†еЉЇи∞ГдЇЖеЬ®еЃЮйЩЕеЇФзФ®дЄ≠пЉМйАЙжЛ©COMSOLзЙИжЬђдЄНдїЕи¶БиАГиЩСдЊњжНЈжАІеТМиІЖиІЙжХИжЮЬпЉМињШйЬАеЕЉй°ЊдїњзЬЯз≤ЊеЇ¶еТМеПѓжОІжАІгАВ
еµМеЕ•еЉПеЕЂиВ°жЦЗйЭҐиѓХйҐШеЇУиµДжЦЩзЯ•иѓЖеЃЭеЕЄ-C and C++ normal interview_8.doc.zip