
原文链接:https://blog.csdn.net/x454045816/article/details/108744637
一、算法介绍
蚁群算法,最早是1992年由Marco Dorigo在他的博士论文中提出的,是一种通过模拟自然界蚂蚁寻径的行为,提出的一种全新的模拟进化算法。据昆虫学家的观察和研究发现,生物世界中的蚂蚁有能力在没有任何可见提示下找到从其巢穴到食物源的最短路径,并能随环境的变化而变化,适应性地搜索新的路径,产生新的选择。这是因为蚂蚁在寻找路径时会在路径上释放一种特殊的分泌物——信息素,使得一定范围内的其他蚂蚁能够觉察并影响它们以后的寻径行为。当一些路径上通过的蚂蚁越来越多时,该路径上的信息素浓度就越大,后来的蚂蚁选择该路径的可能性就越大,从而进一步增加了该路径上的信息素浓度,这种选择过程称为蚂蚁的自催化行为
二、基本思想
- 根据具体问题设置多只蚂蚁,分头并行搜索。
- 每只蚂蚁完成一次周游后,在行进的路上释放信息素,信息素量与解的质量成正比。
- 蚂蚁路径的选择根据信息素强度大小(初始信息素量设为相等),同时考虑两点之间的距离,采用随机的局部搜索策略。这使得距离较短的边,其上的信息素量较大,后来的蚂蚁选择该边的概率也较大。
- 每只蚂蚁只能走合法路线(经过每个城市1次且仅1次),为此设置禁忌表来控制。
- 所有蚂蚁都搜索完一次就是迭代一次,每迭代一次就对所有的边做一次信息素更新,原来的蚂蚁死掉,新的蚂蚁进行新一轮搜索。
- 更新信息素包括原有信息素的蒸发和经过的路径上信息素的增加。
- 达到预定的迭代步数,或出现停滞现象(所有蚂蚁都选择同样的路径,解不再变化),则算法结束,以当前最优解作为问题的最优解。
三、算法流程
1. 初始化参数:开始时,每条边的信息素量都相等</p>
2. 将各只蚂蚁放置各顶点,禁忌表为对应的顶点。</p>
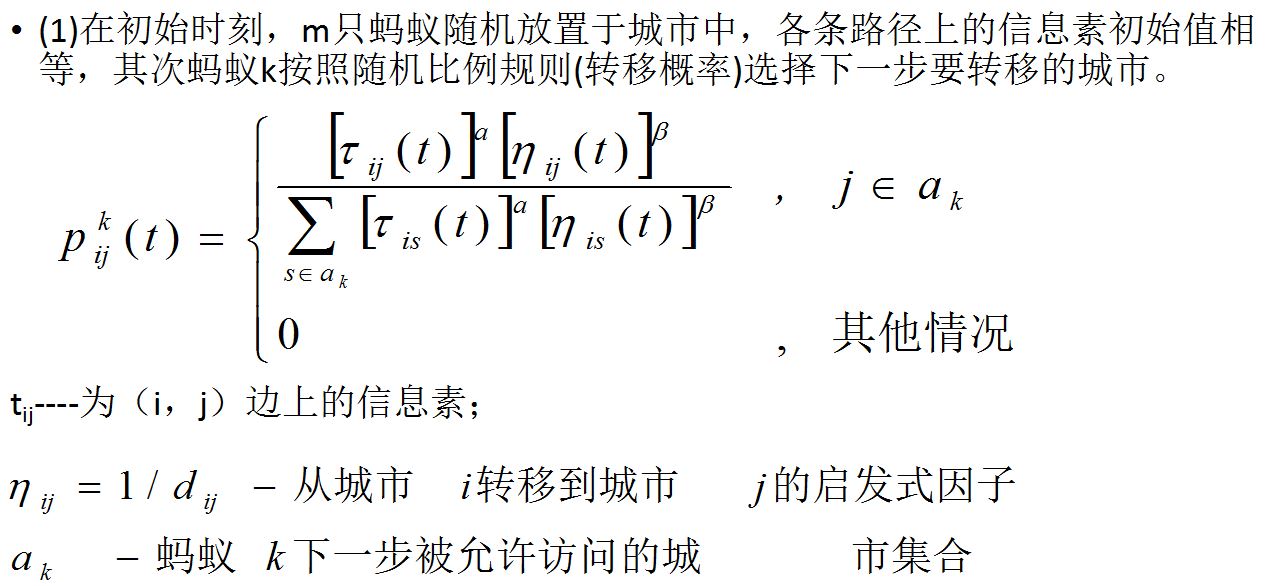
3. 取1只蚂蚁,计算转移概率 ,按照轮 盘赌的方式选择下一个顶点,更新禁忌表,再计算概率,再选择顶点,再更新禁忌表,直至遍历所有顶点一次。</p>
4.计算该只蚂蚁留在各边的信息素量 ,该蚂蚁死去。</p>
5. 重复3-4步,直至m只蚂蚁都周游完毕。</p>
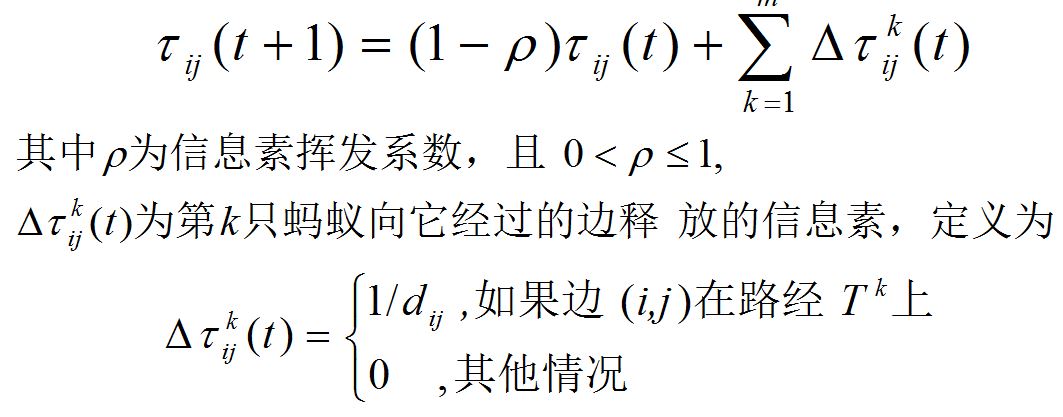
6. 计算各边的信息素增量 和信息素量 。</p>
7. 计算本次迭代的路径,更新当前的最优路径,清空禁忌表。</p>
8. 判断是否达到预定的迭代步数,或者是否出现停滞现象,若是则算法结束,输出当前最优路径,否则转到步骤2,进行下一次迭代。
第一个是转移城市概率公式:
第二个公式是:信息素更新公式
aco
# -*- coding: utf-8 -*-
"""
Created on Wed Jun 16 15:21:03 2018
@author: SYSTEM
"""
import os
os.getcwd()
#返回当前工作目录
import numpy as np
import matplotlib.pyplot as plt
import math
# % pylab
#初始化城市坐标,总共52个城市
coordinates = np.array([[565.0, 575.0], [25.0, 185.0], [345.0, 750.0], [945.0, 685.0], [845.0, 655.0],
[880.0, 660.0], [25.0, 230.0], [525.0, 1000.0], [580.0, 1175.0], [650.0, 1130.0],
[1605.0, 620.0], [1220.0, 580.0], [1465.0, 200.0], [1530.0, 5.0], [845.0, 680.0],
[725.0, 370.0], [145.0, 665.0], [415.0, 635.0], [510.0, 875.0], [560.0, 365.0],
[300.0, 465.0], [520.0, 585.0], [480.0, 415.0], [835.0, 625.0], [975.0, 580.0],
[1215.0, 245.0], [1320.0, 315.0], [1250.0, 400.0], [660.0, 180.0], [410.0, 250.0],
[420.0, 555.0], [575.0, 665.0], [1150.0, 1160.0], [700.0, 580.0], [685.0, 595.0],
[685.0, 610.0], [770.0, 610.0], [795.0, 645.0], [720.0, 635.0], [760.0, 650.0],
[475.0, 960.0], [95.0, 260.0], [875.0, 920.0], [700.0, 500.0], [555.0, 815.0],
[830.0, 485.0], [1170.0, 65.0], [830.0, 610.0], [605.0, 625.0], [595.0, 360.0],
[1340.0, 725.0], [1740.0, 245.0]])
#计算52个城市间的欧式距离
def getdistmat(coordinates):
num = coordinates.shape[0]
distmat = np.zeros((52, 52))
# 初始化生成52*52的矩阵
for i in range(len(coordinates)):
xi,yi = coordinates[i][0],coordinates[i][1]
for j in range(len(coordinates)):
xj,yj = coordinates[j][0],coordinates[j][1]
if (xi==xj) & (yi==yj):
distmat[i,j] = round(0)
else:
#distmat[i,j] = round(math.sqrt((xi-xj)**2+(yi-yj)**2),2)
distmat[i,j] = round(math.sqrt((xi-xj)**2+(yi-yj)**2))
return distmat
#返回城市距离矩阵
distmat = getdistmat(coordinates)
print distmat
numant = 60 # 蚂蚁个数
numcity = coordinates.shape[0]
# shape[0]=52 城市个数,也就是任务个数
alpha = 1 # 信息素重要程度因子
beta = 3 # 启发函数重要程度因子
rho = 0.1 # 信息素的挥发速度
Q = 1 # 完成率
iter = 0 #迭代初始
itermax = 500 #迭代总数
#print np.diag([1e10] * numcity)
etatable = 1.0 / (distmat + np.diag([1e10] * numcity))
#print etatable
#diag(),将一维数组转化为方阵 启发函数矩阵,表示蚂蚁从城市i转移到城市j的期望程度
pheromonetable = np.ones((numcity, numcity))
# 信息素矩阵 52*52
pathtable = np.zeros((numant, numcity)).astype(int)
# 路径记录表,转化成整型 40*52
distmat = getdistmat(coordinates)
# 城市的距离矩阵 52*52
lengthaver = np.zeros(itermax) # 迭代50次,存放每次迭代后,路径的平均长度 50*1
lengthbest = np.zeros(itermax) # 迭代50次,存放每次迭代后,最佳路径长度 50*1
pathbest = np.zeros((itermax, numcity)) # 迭代50次,存放每次迭代后,最佳路径城市的坐标 50*52
while iter < itermax:
#迭代总数
#40个蚂蚁随机放置于52个城市中
if numant <= numcity: # 城市数比蚂蚁数多,不用管
pathtable[:, 0] = np.random.permutation(range(1,numcity))[:numant-1]
#返回一个打乱的40*52矩阵,但是并不改变原来的数组,把这个数组的第一列(40个元素)放到路径表的第一列中
#矩阵的意思是哪个蚂蚁在哪个城市,矩阵元素不大于52
else: # 蚂蚁数比城市数多,需要有城市放多个蚂蚁
pathtable[:numcity, 0] = np.random.permutation(range(numcity))[:]
# 先放52个
pathtable[numcity:, 0] = np.random.permutation(range(numcity))[:numant - numcity]
# 再把剩下的放完
# print(pathtable[:,0])
#print pathtable
length = np.zeros(numant) # 1*40的数组
#本段程序算出每只/第i只蚂蚁转移到下一个城市的概率
for i in range(numant):
# i=0
visiting = pathtable[i, 0] # 当前所在的城市
# set()创建一个无序不重复元素集合
# visited = set() #已访问过的城市,防止重复
# visited.add(visiting) #增加元素
unvisited = set(range(numcity))
#未访问的城市集合
#剔除重复的元素
unvisited.remove(visiting) # 删除已经访问过的城市元素
for j in range(1, numcity): # 循环numcity-1次,访问剩余的所有numcity-1个城市
# j=1
# 每次用轮*盘法选择下一个要访问的城市
listunvisited = list(unvisited)
#未访问城市数,list
probtrans = np.zeros(len(listunvisited))
#每次循环都初始化转移概率矩阵1*52,1*51,1*50,1*49....
#以下是计算转移概率
for k in range(len(listunvisited)):
probtrans[k] = np.power(pheromonetable[visiting][listunvisited[k]], alpha) \
* np.power(etatable[visiting][listunvisited[k]], beta)
#eta-从城市i到城市j的启发因子 这是概率公式的分母 其中[visiting][listunvis[k]]是从本城市到k城市的信息素
cumsumprobtrans = (probtrans / sum(probtrans)).cumsum()
#求出本只蚂蚁的转移到各个城市的概率斐波衲挈数列
cumsumprobtrans -= np.random.rand()
# 随机生成下个城市的转移概率,再用区间比较
# k = listunvisited[find(cumsumprobtrans > 0)[0]]
k = listunvisited[list(cumsumprobtrans > 0).index(True)]
# k = listunvisited[np.where(cumsumprobtrans > 0)[0]]
# where 函数选出符合cumsumprobtans>0的数
# 下一个要访问的城市
pathtable[i, j] = k
#采用禁忌表来记录蚂蚁i当前走过的第j城市的坐标,这里走了第j个城市.k是中间值
unvisited.remove(k)
# visited.add(k)
#将未访问城市列表中的K城市删去,增加到已访问城市列表中
length[i] += distmat[visiting][k]
#计算本城市到K城市的距离
visiting = k
length[i] += distmat[visiting][pathtable[i, 0]]
# 计算本只蚂蚁的总的路径距离,包括最后一个城市和第一个城市的距离
# print("ants all length:",length)
# 包含所有蚂蚁的一个迭代结束后,统计本次迭代的若干统计参数
lengthaver[iter] = length.mean()
#本轮的平均路径
#本部分是为了求出最佳路径
if iter == 0:
lengthbest[iter] = length.min()
pathbest[iter] = pathtable[length.argmin()].copy()
#如果是第一轮路径,则选择本轮最短的路径,并返回索引值下标,并将其记录
else:
#后面几轮的情况,更新最佳路径
if length.min() > lengthbest[iter - 1]:
lengthbest[iter] = lengthbest[iter - 1]
pathbest[iter] = pathbest[iter - 1].copy()
# 如果是第一轮路径,则选择本轮最短的路径,并返回索引值下标,并将其记录
else:
lengthbest[iter] = length.min()
pathbest[iter] = pathtable[length.argmin()].copy()
#此部分是为了更新信息素
changepheromonetable = np.zeros((numcity, numcity))
for i in range(numant):#更新所有的蚂蚁
for j in range(numcity - 1):
changepheromonetable[pathtable[i, j]][pathtable[i, j + 1]] += Q / distmat[pathtable[i, j]][pathtable[i, j + 1]]
#根据公式更新本只蚂蚁改变的城市间的信息素 Q/d 其中d是从第j个城市到第j+1个城市的距离
changepheromonetable[pathtable[i, j + 1]][pathtable[i, 0]] += Q / distmat[pathtable[i, j + 1]][pathtable[i, 0]]
#首城市到最后一个城市 所有蚂蚁改变的信息素总和
#信息素更新公式p=(1-挥发速率)*现有信息素+改变的信息素
pheromonetable = (1 - rho) * pheromonetable + changepheromonetable
iter += 1 # 迭代次数指示器+1
print("this iteration end:",iter)
# 观察程序执行进度,该功能是非必须的
if (iter - 1) % 20 == 0:
print("schedule:",iter - 1)
#迭代完成
#以下是做图部分
#做出平均路径长度和最优路径长度
fig, axes = plt.subplots(nrows=2, ncols=1, figsize=(12, 10))
axes[0].plot(lengthaver, 'k', marker='*')
axes[0].set_title('Average Length')
axes[0].set_xlabel(u'iteration')
#线条颜色black https://blog.csdn.net/ywjun0919/article/details/8692018
#axes[1].plot(lengthbest, 'k', marker='<')
axes[1].set_title('Best Length')
axes[1].set_xlabel(u'iteration')
#fig.savefig('Average_Best.png', dpi=500, bbox_inches='tight')
#plt.close()
#fig.show()
# 作出找到的最优路径图
bestpath = pathbest[-1]
plt.plot(coordinates[:, 0], coordinates[:, 1], 'r.', marker='>')
plt.xlim([-100, 2000])
#x范围
plt.ylim([-100, 1500])
#y范围
for i in range(numcity - 1):
#按坐标绘出最佳两两城市间路径
m, n = int(bestpath[i]), int(bestpath[i + 1])
print("best_path:",m, n)
plt.plot([coordinates[m][0],coordinates[n][0]], [coordinates[m][1], coordinates[n][1]], 'k')
plt.plot([coordinates[int(bestpath[0])][0],coordinates[int(bestpath[51])][0]], [coordinates[int(bestpath[0])][1],coordinates[int(bestpath[51])][1]] ,'b')
print lengthbest.min()
#ax = plt.gca()
#ax.set_title("Best Path")
#ax.set_xlabel('X_axis')
#ax.set_ylabel('Y_axis')
#plt.savefig('Best Path.png', dpi=500, bbox_inches='tight')
#plt.close()
pso
import math
import random
import pandas as pd
import matplotlib.pyplot as plt
from matplotlib.pylab import mpl
import numpy as np
#计算52个城市间的欧式距离
def getdistmat(coordinates):
num = coordinates.shape[0]
distmat = np.zeros((num, num))
# 初始化生成52*52的矩阵
for i in range(len(coordinates)):
xi,yi = coordinates[i][0],coordinates[i][1]
for j in range(len(coordinates)):
xj,yj = coordinates[j][0],coordinates[j][1]
if (xi==xj) & (yi==yj):
distmat[i,j] = round(0)
else:
distmat[i,j] = int(math.sqrt((xi-xj)**2+(yi-yj)**2))
return distmat
#返回城市距离矩阵
def calFitness(line,dis_matrix):
'''
计算路径距离,即评价函数
输入:line-路径,dis_matrix-城市间距离矩阵;
输出:路径距离-dis_sum
'''
dis_sum = 0
dis = 0
for i in range(len(line)-1):
dis = dis_matrix[line[i],line[i+1]]#计算距离
dis_sum = dis_sum+dis
dis = dis_matrix[line[-1],line[0]]
dis_sum = dis_sum+dis
return round(dis_sum,1)
def draw_path(line,CityCoordinates):
'''
#画路径图
输入:line-路径,CityCoordinates-城市坐标;
输出:路径图
'''
x,y= [],[]
for i in line:
Coordinate = CityCoordinates[i]
x.append(Coordinate[0])
y.append(Coordinate[1])
x.append(x[0])
y.append(y[0])
plt.plot(x, y,'r-', color='#4169E1', alpha=0.8, linewidth=0.8)
plt.xlabel('x')
plt.ylabel('y')
plt.show()
def crossover(bird,pLine,gLine,w,c1,c2):
croBird = [None]*len(bird)#初始化
parent1 = bird#选择parent1
#选择parent2(轮*盘赌操作)
randNum = random.uniform(0, sum([w,c1,c2]))
if randNum <= w:
parent2 = [bird[i] for i in range(len(bird)-1,-1,-1)]#bird的逆序
elif randNum <= w+c1:
parent2 = pLine
else:
parent2 = gLine
#parent1-> croBird
start_pos = random.randint(0,len(parent1)-1)
end_pos = random.randint(0,len(parent1)-1)
if start_pos>end_pos:start_pos,end_pos = end_pos,start_pos
croBird[start_pos:end_pos+1] = np.copy(parent1[start_pos:end_pos+1])
# parent2 -> croBird
list1 = list(range(0,start_pos))
list2 = list(range(end_pos+1,len(parent2)))
list_index = list1+list2#croBird从后往前填充
j = -1
for i in list_index:
for j in range(j+1,len(parent2)+1):
if parent2[j] not in croBird:
croBird[i] = parent2[j]
break
return croBird
#参数
CityNum = 52#城市数量
MinCoordinate = 0#二维坐标最小值
MaxCoordinate = 101#二维坐标最大值
iterMax = 1000#迭代次数
iterI = 1#当前迭代次数
#PSO参数
birdNum = 100#粒子数量
w = 0.3#惯性因子
c1 = 0.3#自我认知因子
c2 = 0.4#社会认知因子
pBest,pLine =0,[]#当前最优值、当前最优解,(自我认知部分)
gBest,gLine = 0,[]#全局最优值、全局最优解,(社会认知部分)
#初始化城市坐标,总共52个城市
coordinates = np.array([[565.0, 575.0], [25.0, 185.0], [345.0, 750.0], [945.0, 685.0], [845.0, 655.0],
[880.0, 660.0], [25.0, 230.0], [525.0, 1000.0], [580.0, 1175.0], [650.0, 1130.0],
[1605.0, 620.0], [1220.0, 580.0], [1465.0, 200.0], [1530.0, 5.0], [845.0, 680.0],
[725.0, 370.0], [145.0, 665.0], [415.0, 635.0], [510.0, 875.0], [560.0, 365.0],
[300.0, 465.0], [520.0, 585.0], [480.0, 415.0], [835.0, 625.0], [975.0, 580.0],
[1215.0, 245.0], [1320.0, 315.0], [1250.0, 400.0], [660.0, 180.0], [410.0, 250.0],
[420.0, 555.0], [575.0, 665.0], [1150.0, 1160.0], [700.0, 580.0], [685.0, 595.0],
[685.0, 610.0], [770.0, 610.0], [795.0, 645.0], [720.0, 635.0], [760.0, 650.0],
[475.0, 960.0], [95.0, 260.0], [875.0, 920.0], [700.0, 500.0], [555.0, 815.0],
[830.0, 485.0], [1170.0, 65.0], [830.0, 610.0], [605.0, 625.0], [595.0, 360.0],
[1340.0, 725.0], [1740.0, 245.0]])
dis_matrix = getdistmat(coordinates)#计算城市间距离,生成矩阵
birdPop = [random.sample(range(len(coordinates)),len(coordinates)) for i in range(birdNum)]#初始化种群,随机生成
fits = [calFitness(birdPop[i],dis_matrix) for i in range(birdNum)]#计算种群适应度
gBest = pBest = min(fits)#全局最优值、当前最优值
gLine = pLine = birdPop[fits.index(min(fits))]#全局最优解、当前最优解
while iterI <= iterMax:#迭代开始
for i in range(len(birdPop)):
birdPop[i] = crossover(birdPop[i],pLine,gLine,w,c1,c2)
fits[i] = calFitness(birdPop[i],dis_matrix)
pBest,pLine = min(fits),birdPop[fits.index(min(fits))]
if min(fits) <= gBest:
gBest,gLine = min(fits),birdPop[fits.index(min(fits))]
if (iterI % 20 == 0):
print(iterI,gBest)#打印当前代数和最佳适应度值
iterI += 1#迭代计数加一
print(gLine)#路径顺序
print(gBest)
draw_path(gLine,coordinates)#画路径图
alns
# Adaptive Large Neighborhood Search
import numpy as np
import random as rd
import copy
import matplotlib.pyplot as plt
import math
destory_num = 7
#初始化城市坐标,总共52个城市
coordinates = np.array([[565.0, 575.0], [25.0, 185.0], [345.0, 750.0], [945.0, 685.0], [845.0, 655.0],
[880.0, 660.0], [25.0, 230.0], [525.0, 1000.0], [580.0, 1175.0], [650.0, 1130.0],
[1605.0, 620.0], [1220.0, 580.0], [1465.0, 200.0], [1530.0, 5.0], [845.0, 680.0],
[725.0, 370.0], [145.0, 665.0], [415.0, 635.0], [510.0, 875.0], [560.0, 365.0],
[300.0, 465.0], [520.0, 585.0], [480.0, 415.0], [835.0, 625.0], [975.0, 580.0],
[1215.0, 245.0], [1320.0, 315.0], [1250.0, 400.0], [660.0, 180.0], [410.0, 250.0],
[420.0, 555.0], [575.0, 665.0], [1150.0, 1160.0], [700.0, 580.0], [685.0, 595.0],
[685.0, 610.0], [770.0, 610.0], [795.0, 645.0], [720.0, 635.0], [760.0, 650.0],
[475.0, 960.0], [95.0, 260.0], [875.0, 920.0], [700.0, 500.0], [555.0, 815.0],
[830.0, 485.0], [1170.0, 65.0], [830.0, 610.0], [605.0, 625.0], [595.0, 360.0],
[1340.0, 725.0], [1740.0, 245.0]])
#计算52个城市间的欧式距离
def getdistmat(coordinates):
num = coordinates.shape[0]
distmat = np.zeros((num, num))
# 初始化生成52*52的矩阵
for i in range(len(coordinates)):
xi,yi = coordinates[i][0],coordinates[i][1]
for j in range(len(coordinates)):
xj,yj = coordinates[j][0],coordinates[j][1]
if (xi==xj) & (yi==yj):
distmat[i,j] = round(0)
else:
distmat[i,j] = int(math.sqrt((xi-xj)**2+(yi-yj)**2))
return distmat
#返回城市距离矩阵
distmat = getdistmat(coordinates)
print distmat
numcity = coordinates.shape[0]
'''
distmat = np.array([[0,350,290,670,600,500,660,440,720,410,480,970],
[350,0,340,360,280,375,555,490,785,760,700,1100],
[290,340,0,580,410,630,795,680,1030,695,780,1300],
[670,360,580,0,260,380,610,805,870,1100,1000,1100],
[600,280,410,260,0,610,780,735,1030,1000,960,1300],
[500,375,630,380,610,0,160,645,500,950,815,950],
[660,555,795,610,780,160,0,495,345,820,680,830],
[440,490,680,805,735,645,495,0,350,435,300,625],
[720,785,1030,870,1030,500,345,350,0,475,320,485],
[410,760,695,1100,1000,950,820,435,475,0,265,745],
[480,700,780,1000,960,815,680,300,320,265,0,585],
[970,1100,1300,1100,1300,950,830,625,485,745,585,0]])
'''
def disCal(path): # calculate distance
distance = 0
for i in range(0, len(path) - 1):
distance += distmat[path[i]][path[i + 1]]
distance += distmat[path[-1]][path[0]]
return distance
def selectAndUseDestroyOperator(destroyWeight,currentSolution): # select and use destroy operators
destroyOperator = -1
sol = copy.deepcopy(currentSolution)
destroyRoulette = np.array(destroyWeight).cumsum()
r = rd.uniform(0, max(destroyRoulette))
for i in range(len(destroyRoulette)):
if destroyRoulette[i] >= r:
if i == 0:
destroyOperator = i
removedCities = randomDestroy(sol)
destroyUseTimes[i] += 1
break
elif i == 1:
destroyOperator = i
removedCities = max3Destroy(sol)
destroyUseTimes[i] += 1
break
return sol,removedCities,destroyOperator
def selectAndUseRepairOperator(repairWeight,destroyedSolution,removeList): # select and use repair operators
repairOperator = -1
repairRoulette = np.array(repairWeight).cumsum()
r = rd.uniform(0, max(repairRoulette))
i=1
#for i in range(len(repairRoulette)):
# if repairRoulette[i] >= r:
if i == 0:
repairOperator = i
randomInsert(destroyedSolution,removeList)
repairUseTimes[i] += 1
# break
elif i == 1:
repairOperator = i
greedyInsert(destroyedSolution,removeList)
repairUseTimes[i] += 1
# break
return destroyedSolution,repairOperator
def randomDestroy(sol): # randomly remove 3 cities
solNew = copy.deepcopy(sol)
removed = []
removeIndex = rd.sample(range(0, distmat.shape[0]), destory_num)
for i in removeIndex:
removed.append(solNew[i])
sol.remove(solNew[i])
return removed
def max3Destroy(sol): # remove city with 3 longest segments
solNew = copy.deepcopy(sol)
removed = []
dis = []
for i in range(len(sol) - 1):
dis.append(distmat[sol[i]][sol[i + 1]])
dis.append(distmat[sol[-1]][sol[0]])
disSort = copy.deepcopy(dis)
disSort.sort()
for i in range(destory_num):
if dis.index(disSort[len(disSort) - i - 1]) == len(dis) - 1:
removed.append(solNew[0])
sol.remove(solNew[0])
else:
removed.append(solNew[dis.index(disSort[len(disSort) - i - 1]) + 1])
sol.remove(solNew[dis.index(disSort[len(disSort) - i - 1]) + 1])
return removed
def randomInsert(sol,removeList): # randomly insert 3 cities
insertIndex = rd.sample(range(0, distmat.shape[0]), destory_num)
for i in range(len(insertIndex)):
sol.insert(insertIndex[i],removeList[i])
def greedyInsert(sol,removeList): # greedy insertion
dis = float("inf")
insertIndex = -1
for i in range(len(removeList)):
for j in range(len(sol) + 1):
solNew = copy.deepcopy(sol)
solNew.insert(j,removeList[i])
if disCal(solNew) < dis:
dis = disCal(solNew)
insertIndex = j
sol.insert(insertIndex,removeList[i])
dis = float("inf")
T = 200
a = 0.9
b = 0.5
wDestroy = [1 for i in range(2)] # weights of the destroy operators
wRepair = [1 for i in range(2)] # weights of the repair operators
destroyUseTimes = [0 for i in range(2)] #The number of times the destroy operator has been used
repairUseTimes = [0 for i in range(2)] #The number of times the repair operator has been used
destroyScore = [1 for i in range(2)] # the score of destroy operators
repairScore = [1 for i in range(2)] # the score of repair operators
solution = [i for i in range(distmat.shape[0])] # initial solution
bestSolution = copy.deepcopy(solution) # best solution
iterx, iterxMax = 0, 20
if __name__ == '__main__':
lengthaver = []
lengthbest = []
while iterx < iterxMax: # while stop criteria not met
while T > 10:
destroyedSolution,remove,destroyOperatorIndex = selectAndUseDestroyOperator(wDestroy,solution)
newSolution,repairOperatorIndex = selectAndUseRepairOperator(wRepair,destroyedSolution,remove)
if disCal(newSolution) <= disCal(solution):
solution = newSolution
if disCal(newSolution) <= disCal(bestSolution):
bestSolution = newSolution
destroyScore[destroyOperatorIndex] += 1.4 # update the score of the operators
repairScore[repairOperatorIndex] += 1.4
else:
destroyScore[destroyOperatorIndex] += 1.1
repairScore[repairOperatorIndex] += 1.1
else:
if rd.random() < np.exp(- disCal(newSolution)/ T): # the simulated annealing acceptance criteria
solution = newSolution
destroyScore[destroyOperatorIndex] += 0.9
repairScore[repairOperatorIndex] += 0.9
else:
destroyScore[destroyOperatorIndex] += 0.6
repairScore[repairOperatorIndex] += 0.6
wDestroy[destroyOperatorIndex] = wDestroy[destroyOperatorIndex] * b + (1 - b) * \
(destroyScore[destroyOperatorIndex] / destroyUseTimes[destroyOperatorIndex])
wRepair[repairOperatorIndex] = wRepair[repairOperatorIndex] * b + (1 - b) * \
(repairScore[repairOperatorIndex] / repairUseTimes[repairOperatorIndex])
# update the weight of the operators
T = a * T
lengthaver.append(disCal(solution))
iterx += 1
T = 100
lengthbest = lengthaver
#以下是做图部分
#做出平均路径长度和最优路径长度
fig, axes = plt.subplots(nrows=2, ncols=1, figsize=(12, 10))
axes[0].plot(lengthaver, 'k', marker='*')
axes[0].set_title('Average Length')
axes[0].set_xlabel(u'iteration')
#线条颜色black https://blog.csdn.net/ywjun0919/article/details/8692018
axes[1].plot(lengthaver, 'k', marker='<')
axes[1].set_title('Best Length')
axes[1].set_xlabel(u'iteration')
# 作出找到的最优路径图
bestpath = bestSolution
plt.plot(coordinates[:, 0], coordinates[:, 1], 'r.', marker='>')
plt.xlim([-100, 2000])
#x范围
plt.ylim([-100, 1500])
#y范围
for i in range(numcity - 1):
#按坐标绘出最佳两两城市间路径
m, n = int(bestpath[i]), int(bestpath[i + 1])
print("best_path:",m, n)
plt.plot([coordinates[m][0],coordinates[n][0]], [coordinates[m][1], coordinates[n][1]], 'k')
plt.plot([coordinates[int(bestpath[0])][0],coordinates[int(bestpath[51])][0]], [coordinates[int(bestpath[0])][1],coordinates[int(bestpath[51])][1]] ,'b')
print(bestSolution)
print(disCal(bestSolution))
ga
# -*- encoding: utf-8 -*-
import numpy as np
import pandas as pd
import math
import matplotlib.pyplot as plt
#初始化城市坐标,总共52个城市
coordinates = np.array([[565.0, 575.0], [25.0, 185.0], [345.0, 750.0], [945.0, 685.0], [845.0, 655.0],
[880.0, 660.0], [25.0, 230.0], [525.0, 1000.0], [580.0, 1175.0], [650.0, 1130.0],
[1605.0, 620.0], [1220.0, 580.0], [1465.0, 200.0], [1530.0, 5.0], [845.0, 680.0],
[725.0, 370.0], [145.0, 665.0], [415.0, 635.0], [510.0, 875.0], [560.0, 365.0],
[300.0, 465.0], [520.0, 585.0], [480.0, 415.0], [835.0, 625.0], [975.0, 580.0],
[1215.0, 245.0], [1320.0, 315.0], [1250.0, 400.0], [660.0, 180.0], [410.0, 250.0],
[420.0, 555.0], [575.0, 665.0], [1150.0, 1160.0], [700.0, 580.0], [685.0, 595.0],
[685.0, 610.0], [770.0, 610.0], [795.0, 645.0], [720.0, 635.0], [760.0, 650.0],
[475.0, 960.0], [95.0, 260.0], [875.0, 920.0], [700.0, 500.0], [555.0, 815.0],
[830.0, 485.0], [1170.0, 65.0], [830.0, 610.0], [605.0, 625.0], [595.0, 360.0],
[1340.0, 725.0], [1740.0, 245.0]])
#计算52个城市间的欧式距离
def getdistmat(coordinates):
num = coordinates.shape[0]
distmat = np.zeros((52, 52))
# 初始化生成52*52的矩阵
for i in range(len(coordinates)):
xi,yi = coordinates[i][0],coordinates[i][1]
for j in range(len(coordinates)):
xj,yj = coordinates[j][0],coordinates[j][1]
if (xi==xj) & (yi==yj):
distmat[i,j] = round(0)
else:
distmat[i,j] = round(math.sqrt((xi-xj)**2+(yi-yj)**2),2)
return distmat
#返回城市距离矩阵
distmat = getdistmat(coordinates)
print distmat
numcity = coordinates.shape[0]
class TSP(object):
citys = np.array([]) #城市数组
pop_size = 100 #种群大小
c_rate = 0.7 #交叉率
m_rate = 0.05 #突变率
pop = np.array([]) #种群数组
fitness = np.array([]) #适应度数组
city_size = -1 #标记城市数目
ga_num = 200 #最大迭代次数
best_dist = -1 #记录目前最优距离
best_gen = [] #记录目前最优旅行方案
best_length = []
def __init__(self, c_rate, m_rate, pop_size, ga_num):
self.fitness = np.zeros(self.pop_size)
self.c_rate = c_rate
self.m_rate = m_rate
self.pop_size = pop_size
self.ga_num = ga_num
def init(self):
tsp = self
tsp.load_Citys() #加载城市数据
tsp.pop = tsp.creat_pop(tsp.pop_size) #创建种群
tsp.fitness = tsp.get_fitness(tsp.pop) #计算初始种群适应度
def creat_pop(self, size):
pop = []
for i in range(size):
gene = np.arange(self.citys.shape[0]) #问题的解,基因,种群中的个体:[0,...,city_size]
np.random.shuffle(gene) #打乱数组[0,...,city_size]
pop.append(gene) #加入种群
return np.array(pop)
def get_fitness(self, pop):
d = np.array([]) #适应度记录数组
for i in range(pop.shape[0]):
gen = pop[i] # 取其中一条基因(编码解,个体)
dis = self.gen_distance(gen) #计算此基因优劣(距离长短)
dis = self.best_dist / dis #当前最优距离除以当前pop[i](个体)距离;越近适应度越高,最优适应度为1
d = np.append(d, dis) # 保存适应度pop[i]
return d
def get_local_fitness(self, gen, i):
'''
计算地i个城市的邻域
交换基因数组中任意两个值组成的解集:称为邻域。计算领域内所有可能的适应度
:param gen:城市路径
:param i:第i城市
:return:第i城市的局部适应度
'''
di = 0
fi = 0
if i == 0:
di = distmat[gen[0], gen[-1]]
else:
di = distmat[gen[i], gen[i - 1]]
od = []
for j in range(self.city_size):
if i != j:
od.append(distmat[gen[i], gen[i - 1]])
mind = np.min(od)
fi = di - mind
return fi
def EO(self, gen):
#极值优化,传统遗传算法性能不好,这里混合EO
#其会在整个基因的领域内,寻找一个最佳变换以更新基因
local_fitness = []
for g in range(self.city_size):
f = self.get_local_fitness(gen, g)
local_fitness.append(f)
max_city_i = np.argmax(local_fitness)
maxgen = np.copy(gen)
if 1 < max_city_i < self.city_size - 1:
for j in range(max_city_i):
maxgen = np.copy(gen)
jj = max_city_i
while jj < self.city_size:
gen1 = self.exechange_gen(maxgen, j, jj)
d = self.gen_distance(maxgen)
d1 = self.gen_distance(gen1)
if d > d1:
maxgen = gen1[:]
jj += 1
gen = maxgen
return gen
def select_pop(self, pop):
#选择种群,优胜劣汰,策略1:低于平均的要替换改变
best_f_index = np.argmax(self.fitness)
av = np.median(self.fitness, axis=0)
for i in range(self.pop_size):
if i != best_f_index and self.fitness[i] < av:
pi = self.cross(pop[best_f_index], pop[i])
pi = self.mutate(pi)
# d1 = self.distance(pi)
# d2 = self.distance(pop[i])
# if d1 < d2:
pop[i, :] = pi[:]
return pop
def select_pop2(self, pop):
#选择种群,优胜劣汰,策略2:轮*盘赌,适应度低的替换的概率大
probility = self.fitness / self.fitness.sum()
idx = np.random.choice(np.arange(self.pop_size), size=self.pop_size, replace=True, p=probility)
n_pop = pop[idx, :]
return n_pop
def cross(self, parent1, parent2):
"""交叉p1,p2的部分基因片段"""
if np.random.rand() > self.c_rate:
return parent1
index1 = np.random.randint(0, self.city_size - 1)
index2 = np.random.randint(index1, self.city_size - 1)
tempGene = parent2[index1:index2] # 交叉的基因片段
newGene = []
p1len = 0
for g in parent1:
if p1len == index1:
newGene.extend(tempGene) # 插入基因片段
if g not in tempGene:
newGene.append(g)
p1len += 1
newGene = np.array(newGene)
if newGene.shape[0] != self.city_size:
print('c error')
return self.creat_pop(1)
# return parent1
return newGene
def mutate(self, gene):
"""突变"""
if np.random.rand() > self.m_rate:
return gene
index1 = np.random.randint(0, self.city_size - 1)
index2 = np.random.randint(index1, self.city_size - 1)
newGene = self.reverse_gen(gene, index1, index2)
if newGene.shape[0] != self.city_size:
print('m error')
return self.creat_pop(1)
return newGene
def reverse_gen(self, gen, i, j):
#函数:翻转基因中i到j之间的基因片段
if i >= j:
return gen
if j > self.city_size - 1:
return gen
parent1 = np.copy(gen)
tempGene = parent1[i:j]
newGene = []
p1len = 0
for g in parent1:
if p1len == i:
newGene.extend(tempGene[::-1]) # 插入基因片段
if g not in tempGene:
newGene.append(g)
p1len += 1
return np.array(newGene)
def exechange_gen(self, gen, i, j):
#函数:交换基因中i,j值
c = gen[j]
gen[j] = gen[i]
gen[i] = c
return gen
def evolution(self):
#主程序:迭代进化种群
tsp = self
for i in range(self.ga_num):
best_f_index = np.argmax(tsp.fitness)
worst_f_index = np.argmin(tsp.fitness)
local_best_gen = tsp.pop[best_f_index]
local_best_dist = tsp.gen_distance(local_best_gen)
if i == 0:
tsp.best_gen = local_best_gen
tsp.best_dist = tsp.gen_distance(local_best_gen)
if local_best_dist < tsp.best_dist:
tsp.best_dist = local_best_dist #记录最优值
tsp.best_gen = local_best_gen #记录最个体基因
else:
tsp.pop[worst_f_index] = self.best_gen
print('gen:%d evo,best dist :%s' % (i, self.best_dist))
tsp.pop = tsp.select_pop(tsp.pop) #选择淘汰种群
tsp.fitness = tsp.get_fitness(tsp.pop) #计算种群适应度
for j in range(self.pop_size):
r = np.random.randint(0, self.pop_size - 1)
if j != r:
tsp.pop[j] = tsp.cross(tsp.pop[j], tsp.pop[r]) #交叉种群中第j,r个体的基因
tsp.pop[j] = tsp.mutate(tsp.pop[j]) #突变种群中第j个体的基因
self.best_gen = self.EO(self.best_gen) #极值优化,防止收敛局部最优
tsp.best_dist = tsp.gen_distance(self.best_gen) #记录最优值
tsp.best_length.append(tsp.best_dist)
def load_Citys(self):
# 中国34城市经纬度
self.citys = coordinates
self.city_size = self.citys.shape[0]
def gen_distance(self, gen):
#计算基因所代表的总旅行距离
distance = 0.0
for i in range(-1, len(self.citys) - 1):
index1, index2 = gen[i], gen[i + 1]
distance += distmat[index1][index2]
return distance
def ct_distance(self, city1, city2):
#计算2城市之间的欧氏距离
d = np.sqrt((city1[0] - city2[0]) ** 2 + (city1[1] - city2[1]) ** 2)
return d
def draw(self):
#重绘图;每次迭代后绘制一次,动态展示。
bestpath = self.best_gen
#以下是做图部分
#做出平均路径长度和最优路径长度
fig, axes = plt.subplots(nrows=2, ncols=1, figsize=(12, 10))
axes[0].plot(self.best_length, 'k', marker='*')
axes[0].set_title('Average Length')
axes[0].set_xlabel(u'iteration')
#线条颜色black https://blog.csdn.net/ywjun0919/article/details/8692018
#axes[1].plot(lengthaver, 'k', marker='<')
axes[1].set_title('Best Length')
axes[1].set_xlabel(u'iteration')
plt.plot(coordinates[:, 0], coordinates[:, 1], 'r.', marker='>')
plt.xlim([-100, 2000])
#x范围
plt.ylim([-100, 1500])
#y范围
for i in range(numcity - 1):
#按坐标绘出最佳两两城市间路径
m, n = int(bestpath[i]), int(bestpath[i + 1])
print("best_path:",m, n)
plt.plot([coordinates[m][0],coordinates[n][0]], [coordinates[m][1], coordinates[n][1]], 'k')
plt.plot([coordinates[int(bestpath[0])][0],coordinates[int(bestpath[51])][0]], [coordinates[int(bestpath[0])][1],coordinates[int(bestpath[51])][1]] ,'b')
print self.gen_distance(self.best_gen)
tsp = TSP(0.6, 0.1, 300, 1000)
tsp.init()
tsp.evolution()
tsp.draw()



相关推荐
代码 改进蚁群算法求解连续空间优化问题代码代码 改进蚁群算法求解连续空间优化问题代码代码 改进蚁群算法求解连续空间优化问题代码代码 改进蚁群算法求解连续空间优化问题代码代码 改进蚁群算法求解连续空间优化...
蚁群算法工具箱蚁群算法资料:蚁群算法工具箱蚁群算法资料:蚁群算法工具箱蚁群算法资料:蚁群算法工具箱蚁群算法资料:蚁群算法工具蚁群算法工具箱蚁群算法资料:箱蚁群算法资料:蚁群算法工具蚁群算法工具箱蚁群...
【蚁群算法】是模拟自然界中蚂蚁寻找食物过程的一种优化算法,属于群体智能算法的一种,广泛应用于路径规划、网络路由、组合优化问题等。在人工智能领域,蚁群算法因其并行性和分布式特性,能有效解决复杂问题。 在...
蚁群算法源程序(matlab版本) 蚁群算法是一种基于 Swarm Intelligence 的智能优化算法,通过模拟蚂蚁觅食行为来寻找最短路径。该算法的核心思想是将蚂蚁的觅食行为抽象化,从而找到问题的最优解。在这个 Matlab ...
标题中的"matlab蚁群算法工具箱matlab蚁群算法工具箱源代码"指的是一个专门用于MATLAB环境的开源工具箱,它包含了实现蚁群算法的各种函数和脚本,便于研究人员和工程师进行优化问题的求解。这个工具箱通常会包含以下...
蚁群算法(Ant Colony Optimization, ACO)是一种模拟自然界中蚂蚁寻找食物路径行为的优化算法,由Marco Dorigo在1992年提出。它主要用于解决组合优化问题,如旅行商问题、网络路由问题等。MATLAB作为一款强大的数学...
蚁群算法(Ant Colony Optimization, ACO)是一种模拟生物界蚂蚁寻找食物路径行为的优化算法,广泛应用于路径规划、网络路由、旅行商问题等复杂优化问题。在MATLAB环境中实现蚁群算法,可以借助其强大的矩阵运算能力...
蚁群算法(Ant Colony Optimization, ACO)是一种模拟生物进化机制的优化算法,源自自然界中蚂蚁寻找食物的行为。蚂蚁在寻找食物过程中会释放信息素,其他蚂蚁会根据这些信息素的浓度选择路径,最终形成一个高效的...
蚁群算法求解VRPTW问题matlab代码
蚁群算法(Ant Colony Optimization,简称ACO)是一种启发式搜索算法,受蚁群在寻找食物过程中的行为启发而提出。蚁群算法通常用于解决组合优化问题,例如旅行商问题(TSP)、车辆路径问题、作业调度等。 蚁群算法...
蚁群算法(Ant Colony Optimization, ACO)是一种借鉴自然界中蚂蚁寻找食物路径行为的优化算法,它在解决组合优化问题,如旅行商问题、车辆路径问题以及本例中的车间调度问题中表现出强大的潜力。 在“基于蚁群算法...
蚁群算法是一种优化技术,源于生物学中的蚂蚁寻路行为,被广泛应用于解决组合优化问题,如旅行商问题、网络路由等。本资料包含蚁群算法的两种实现:MATLAB和C++,对于学习和理解这一算法有着极大的帮助。 在MATLAB...
标题中的“ACOsecond.rar_ACOsecond_bandrb9_固定起点固定终点ACO代码_蚁群算法_蚁群算法终点”表明这是一个关于蚁群算法(Ant Colony Optimization, ACO)的程序代码,其中包含了特定的优化问题解决方案,即固定...
本文档集中讨论了一种创新方法——基于蚁群算法的图像边缘检测技术,这种技术通过模拟自然界的蚂蚁行为来优化图像的边缘识别过程。 首先,蚁群算法(Ant Colony Optimization, ACO)源于生物学家对蚂蚁寻找食物路径...
蚁群算法(Ant Colony Optimization, ACO)是一种模拟生物界中蚂蚁寻找食物行为的优化算法,主要用于解决组合优化问题,如图的最短路径搜索。在这个场景中,它被应用于栅格地图上的路径规划,旨在找到从起点到终点的...
蚁群算法是一种模拟生物群体行为的优化算法,源自对蚂蚁寻找食物过程中发现路径的行为的研究。在蚁群系统中,每只蚂蚁在环境中留下一种称为信息素的化学物质,这种信息素随着时间逐渐挥发,同时又被其他蚂蚁在经过时...
《蚁群算法在栅格地图上实现最短距离的MATLAB应用详解》 蚁群算法,作为一种模拟自然界的群体智能优化方法,近年来在路径规划问题中得到了广泛应用。它源自于蚂蚁寻找食物过程中发现路径的行为,通过模拟蚂蚁在路径...
蚁群算法是一种模拟自然界蚂蚁寻找食物行为的优化算法,由Marco Dorigo于1992年提出。这种算法基于蚂蚁在寻找食物过程中通过释放信息素来通信和合作的生物现象,将其应用于解决复杂的数学问题,如最优化、路径规划等...
蚁群算法是一种模拟蚂蚁觅食行为的启发式算法,它主要通过群体协作来寻找问题的最优解。该算法由Marco Dorigo在1992年提出,最初应用于解决旅行商问题(TSP),后来逐渐发展和应用到各种优化问题中。蚁群算法属于蚁...