
еҠЁз”»зҺ°еңЁеҹәжң¬жҳҜwebз«ҷзӮ№еҝ…еӨҮйЎ№пјҢеҗ„еӨ§JSжЎҶжһ¶йғҪе°ҒиЈ…дәҶзӣёеә”зҡ„д»Јз ҒгҖӮQWrapд№ҹеҶ…зҪ®дәҶдёҖдёӘе®һзҺ°пјҢж”ҜжҢҒеёёи§Ғзҡ„еҠЁз”»ж•Ҳжһңе’Ңз®—еӯҗеҸҠйҳҹеҲ—ж’ӯж”ҫпјҢиҝҷйҮҢжңүзӨәдҫӢгҖӮJSеҠЁз”»зҡ„е®һзҺ°жңүеӨҡз§Қж–№ејҸпјҢеҗ„иҮӘжңүе“ӘдәӣеҢәеҲ«пјҢQWrapдҪҝз”Ёзҡ„е“ӘдёҖз§Қпјҹжң¬ж–Үй—ІиҒҠиҝҷдёӘиҜқйўҳгҖӮ
дёҖгҖҒдҪҝз”ЁжөҸи§ҲеҷЁзҡ„е®ҡж—¶еҷЁпјҲsetInterval/setTimeoutпјүгҖӮиҝҷз§ҚеҠЁз”»е®һзҺ°ж–№ејҸеҫҲж—©е°ұиў«еӨ§е®¶е№ҝжіӣдҪҝз”ЁпјҢеҺҹзҗҶз®ҖеҚ•пјҢе…је®№жҖ§еҘҪгҖӮжңҖж ёеҝғзҡ„еҺҹзҗҶе°ұжҳҜеҲ©з”Ёе®ҡж—¶еҷЁпјҢеңЁдёҖе®ҡж—¶й—ҙеҶ…пјҲdurationпјүпјҢд»ҘдёҖе®ҡзҡ„й—ҙйҡ”пјҲframeTimeпјүжү§иЎҢеҠЁз”»еҮҪж•°пјҲcallbackпјүгҖӮеңЁеҠЁз”»еҮҪж•°йҮҢеҸҜд»Ҙж”№еҸҳе…ғзҙ еӨ§е°ҸгҖҒдҪҚзҪ®пјҲcssеұһжҖ§еҖјпјүпјӣеҸҜд»Ҙж”№еҸҳе…ғзҙ ж»ҡеҠЁжқЎдҪҚзҪ®пјҲscrollTop/scrollLeftпјүпјӣз”ҡиҮіз”ЁжқҘж”№еҸҳж–Үжң¬еҶ…е®№пјҲеҖ’и®Ўж—¶пјүгҖӮ
еҠЁз”»й—ҙйҡ”еҶіе®ҡдәҶеҠЁз”»зҡ„жҜҸз§’её§ж•°пјҲFPSпјүпјҢдёҖиҲ¬зҡ„пјҢFPSи¶Ҡй«ҳпјҢеҠЁз”»е°ұиЎЁзҺ°еҫ—и¶ҠжөҒз•…пјҢFPSеҒҸдҪҺпјҢеҠЁз”»е°ұдјҡдёҚжөҒз•…гҖҒеҚЎйЎҝгҖӮJQueryдёӯпјҢеҠЁз”»й—ҙйҡ”й»ҳи®Өдёә13msпјҢд№ҹе°ұжҳҜиҜҙзҗҶжғізҠ¶жҖҒдёӢпјҢеҠЁз”»зҡ„жҜҸз§’её§ж•°жҳҜ70еӨҡгҖӮе®һйҷ…дёҠпјҢз”ұдәҺJSе®ҡж—¶еҷЁзІҫеәҰй—®йўҳпјҢй—ҙйҡ”дёҚеҸҜиғҪеӨӘе°ҸпјӣеңЁи®Ўз®—жңәиө„жәҗеҚ з”ЁжҜ”иҫғеӨ§ж—¶пјҢиҝҷдёӘй—ҙйҡ”д№ҹжІЎеҠһжі•еҫ—еҲ°дҝқиҜҒпјӣжӣҙдёәдёҘйҮҚзҡ„жҳҜпјҢж–°дёҖзӮ№зҡ„жөҸи§ҲеҷЁеңЁйЎөйқўдёҚеҸҜи§Ғж—¶пјҲдҫӢеҰӮеҲҮжҚўеҲ°е…¶д»–tabпјҢжөҸи§ҲеҷЁиў«жңҖе°ҸеҢ–пјүпјҢдјҡиҮӘеҠЁжҸҗй«ҳе®ҡж—¶еҷЁжү§иЎҢй—ҙйҡ”пјҢfirefox5ејҖе§ӢпјҢsetIntervalзҡ„й—ҙйҡ”еңЁжөҸи§ҲеҷЁжңҖе°ҸеҢ–д№ӢеҗҺиҮіе°‘иў«жҸҗй«ҳеҲ°1000msгҖӮ
еҠЁз”»ж—¶й•ҝ = ж’ӯж”ҫжҖ»её§ж•° * её§й—ҙйҡ”е№іеқҮеҖјгҖӮз”ұдәҺеё§й—ҙйҡ”дёҚеҸҜжҺ§пјҢеҸҜиғҪиў«жҸҗй«ҳеҲ°1000msз”ҡиҮіжӣҙй«ҳпјҢйӮЈд№Ҳе®һзҺ°еҠЁз”»ж—¶йқўдёҙдёӨдёӘйҖүжӢ©пјҡиҰҒдҝқиҜҒж’ӯж”ҫжҖ»её§ж•°пјҢеҠЁз”»ж—¶й•ҝе°ұдјҡеўһеҠ пјӣиҰҒдҝқиҜҒеҠЁз”»ж—¶й•ҝпјҢе°ұеҝ…йЎ»зүәзүІжҺүжҖ»её§ж•°гҖӮе®һйҷ…дёҠжҲ‘们дёҖиҲ¬йҮҮ用第дәҢз§Қж–№ејҸпјҢд№ҹе°ұжҳҜдёўеё§дҝқж—¶зҡ„зӯ–з•ҘжқҘе®һзҺ°еҠЁз”»пјҢжқҘзңӢдёҖдёӘз®ҖеҚ•зҡ„дҫӢеӯҗпјҡ
HTML<script>
var timerId, startTime, frameTime = 13, dur = 3 * 1000;
function animFun(time) {
var per = Math.min(1.0, (new Date - startTime) / dur);
if(per >= 1) {
clearTimeout(timerId);
} else {
document.getElementById("animated").style.left = Math.round(500 * per) + "px";
}
}
function start() {
startTime = new Date;
timerId = setInterval(animFun, frameTime);
}
</script>
<div id="animated" onclick="start()" style="position: absolute; left: 0px; padding: 50px;background: crimson; color: white">Click Me</div>
еңЁеҠЁз”»ејҖе§Ӣж—¶и®°еҪ•дёҖдёӘеҲқе§Ӣж—¶й—ҙпјҢеҠЁз”»еҮҪж•°йҮҢз”ЁеҪ“еүҚж—¶й—ҙеҮҸеҺ»еҲқе§Ӣж—¶й—ҙпјҢеҫ—еҲ°зҡ„ж—¶й—ҙе·®йҷӨд»ҘжҖ»ж—¶й•ҝпјҢеҸҜд»Ҙеҫ—еҲ°еҠЁз”»жү§иЎҢиҝӣеәҰпјҲperпјүгҖӮеҶҚж №жҚ®perеҺ»ж”№еҸҳе…ғзҙ зҡ„cssеұһжҖ§еҖјпјҢе°ұе®һзҺ°дәҶдёҖдёӘжңҖз®ҖеҚ•зҡ„еҠЁз”»гҖӮ
дёҠйқўдҫӢеӯҗдёӯпјҢж–№еқ—иҝҗеҠЁжҳҜеҢҖйҖҹзҡ„пјҢе№іж·Ўж— еҘҮгҖӮжғіиҰҒиҝҗеҠЁиҪЁиҝ№жӣҙжңүи¶ЈпјҢе°ұйңҖиҰҒеј•е…ҘеҠЁз”»з®—еӯҗгҖӮеҠЁз”»з®—еӯҗжҳҜдёҖдёӘеҮҪж•°пјҢжҠҠеҠЁз”»иҝӣеәҰperиҪ¬жҚўдёәеҸҰеӨ–дёҖдёӘеҖјпјҢеңЁдёҠйқўдҫӢеӯҗеҹәзЎҖдёҠж”№иҝӣдёӢпјҡ
HTML<script>
var timerId, startTime, frameTime = 13, dur = 3 * 1000;
function bounceOut(p) {
if (p < (1 / 2.75)) {
return (7.5625 * p * p);
} else if (p < (2 / 2.75)) {
return (7.5625 * (p -= (1.5 / 2.75)) * p + 0.75);
} else if (p < (2.5 / 2.75)) {
return (7.5625 * (p -= (2.25 / 2.75)) * p + 0.9375);
}
return (7.5625 * (p -= (2.625 / 2.75)) * p + 0.984375);
}
function animFun(time) {
var per = Math.min(1.0, (new Date - startTime) / dur);
if(per >= 1) {
clearTimeout(timerId);
} else {
document.getElementById("animated").style.left = Math.round(500 * bounceOut(per)) + "px";
}
}
function start() {
startTime = new Date;
timerId = setInterval(animFun, frameTime);
}
</script>
<div id="animated" onclick="start()" style="position: absolute; left: 0px; padding: 50px;background: crimson; color: white">Click Me</div>
иҝҷдёӢж–№еқ—иҝҗеҠЁе°ұжңүи¶ЈеӨҡдәҶпјҢдёҠйқўдҫӢеӯҗдёӯзҡ„bounceOutе°ұжҳҜдёҖдёӘз®—еӯҗгҖӮжңүдәӣеҠЁз”»з»„件算еӯҗеҸҜиғҪдјҡжҺҘеҸ—жӣҙеӨҡеҸӮж•°пјҲиҝҗеҠЁи·қзҰ»гҖҒж—¶й—ҙзӯүпјүпјҢдҪҶжҳҜQWrapдёӯпјҢз®—еӯҗйғҪеҸӘйңҖиҰҒдј perгҖӮиҝҷйҮҢжңүQWrapеҶ…зҪ®з®—еӯҗзҡ„жј”зӨәгҖӮ
дәҢгҖҒW3CжңүдёҖд»ҪWindowAnimationTiming interface规иҢғпјҢд№ҹеҸҜд»Ҙз”ЁжқҘе®һзҺ°еҠЁз”»гҖӮе®ғзҡ„ж ёеҝғж–№жі•жҳҜrequestAnimactionFrameе’ҢcancelRequestAnimationFrameгҖӮеҗ„еӨ§жөҸи§ҲеҷЁж–°зүҲйғҪжңүе®һзҺ°пјҢиҝҷйғЁеҲҶеҶ…е®№жҲ‘д№ӢеүҚд»Ӣз»ҚиҝҮпјҢдёҚдәҶи§Јзҡ„еҗҢеӯҰеҸҜд»ҘзӮ№иҝҮеҺ»зңӢпјҢзңӢе®Ңи®°еҫ—еҶҚеӣһжқҘгҖӮ
еҸҜд»ҘзңӢеҲ°пјҢW3Cиҝҷд»Ҫ规иҢғжҸҗдҫӣзҡ„еҠЁз”»жІЎжңүеё§й—ҙйҡ”ж—¶й—ҙиҝҷдёӘжҰӮеҝөпјҢд№ҹе°ұжҳҜдҪ•ж—¶и§ҰеҸ‘дёӢдёҖеё§е®Ңе…Ёз”ұжөҸи§ҲеҷЁжҺ§еҲ¶гҖӮе…¶е®ғж–№йқўи·ҹsetIntervalеҠЁз”»еҮ д№ҺдёҖж ·пјҢдёҠйқўзҡ„з®—еӯҗд№ҹеҸҜд»ҘзӣҙжҺҘжӢҝжқҘз”ЁгҖӮдёӢйқўиҜҙдёӢжҲ‘йҒҮеҲ°зҡ„еҮ дёӘеқ‘пјҡ
йҰ–е…ҲжҳҜfirefoxпјҡеңЁ11д№ӢеүҚзҡ„жҹҗдёӘзүҲжң¬ејҖе§ӢпјҢfirefoxе®һзҺ°дәҶmozRequestAnimationFrameпјҢеҚҙжІЎжңүжҸҗдҫӣеҜ№еә”зҡ„mozCancelRequestAnimationFrameпјҢйӮЈж—¶зҪ‘дёҠжңүж–Үз« дјҡжҸҗеҲ°йҖҡиҝҮвҖңжіЁеҶҢгҖҒ移йҷӨmozз§Ғжңүзҡ„beforepaintдәӢ件вҖқжқҘжЁЎжӢҹиҝҷдёӘдәӢ件гҖӮеқ‘зҲ№зҡ„жҳҜпјҢfirefox11ејҖе§ӢжңүдәҶmozCancelRequestAnimationFrameпјҢдҪҶиҖҒж–№жЎҲзӣҙжҺҘжҠӣејӮеёёгҖӮ
webkitдёӢд№ҹжңүеқ‘пјҡжҹҗдёӘиҜЎејӮзҡ„webKitзүҲжң¬дёӢпјҢwebkitRequestAnimationFrameжІЎжңүз»ҷеӣһи°ғеҮҪж•°дј timeеҸӮж•°пјҢжӣҙзҘһеҘҮзҡ„жҳҜдёҖдәӣwebkitеұ…з„¶дј йҖ’й”ҷиҜҜж јејҸзҡ„timeгҖӮдёәжӯӨпјҢеңЁwebkitдёӢжҲ‘们йҖҡеёёдёҚз”ЁеҸӮж•°йҮҢзҡ„timeпјҢж”№дёәиҮӘе·ұnew DateгҖӮ
з»јдёҠпјҢз”ұдәҺеҗ„жөҸи§ҲеҷЁеҜ№ж ҮеҮҶе®һзҺ°зҡ„дёҚдёҖиҮҙе’ҢbugпјҢжңҖз»ҲжҲ‘们еңЁQWrapдёӯ并没жңүдҪҝз”ЁеҹәдәҺеҺҹз”ҹеҠЁз”»еҮҪж•°зҡ„зүҲжң¬гҖӮдёҚиҝҮд№ҹеҸҜд»ҘеғҸдёӢйқўиҝҷж ·еҸҳйҖҡдҪҝз”ЁпјҢжқҘз»•иҝҮйӮЈдәӣеқ‘пјҡ
HTML<script>
var timerId, startTime, dur = 3 * 1000,
requestAnimationFrame = window.webkitRequestAnimationFrame ||
window.mozRequestAnimationFrame ||
window.msRequestAnimationFrame ||
window.oRequestAnimationFrame;
if(!requestAnimationFrame) { alert('дҪ зҡ„жөҸи§ҲеҷЁдёҚж”ҜжҢҒrequestAnimationFrameпјҒ'); }
function animFun(time) {
if(!timerId) return false;
var per = Math.min(1.0, (new Date - startTime) / dur);
if(per >= 1) {
timerId = null;
} else {
document.getElementById("animated").style.left = Math.round(500 * per) + "px";
requestAnimationFrame(animFun);
}
}
function start() {
startTime = new Date;
timerId = 1;
requestAnimationFrame(animFun);
}
</script>
<div id="animated" onclick="start()" style="position: absolute; left: 0px; padding: 50px;background: crimson; color: white">Click Me</div>
дёүгҖҒCSS3еҠЁз”»гҖӮcss3дёӯзҡ„TransitionеҸҜд»Ҙз”ЁжқҘе№іж»‘ж”№еҸҳcssеұһжҖ§еҖјгҖӮз®ҖиҖҢиЁҖд№ӢпјҢз»ҷе…ғзҙ и®ҫзҪ®дёӢйқўиҝҷж ·зҡ„cssж ·ејҸеҗҺпјҢеҶҚж”№еҸҳtransition-propertyжҢҮе®ҡеұһжҖ§зҡ„еҖјпјҢжөҸи§ҲеҷЁдјҡиҮӘеҠЁеӨ„зҗҶеү©дёӢзҡ„дәӢжғ…пјҡ
йҖҡеёёпјҢжҲ‘们еңЁcssйҮҢеҶҷеҘҪtransition规еҲҷпјҢеҶҚж”№еҸҳе…ғзҙ classе°ұеҸҜд»ҘжӢҘжңүcss3еҠЁз”»дәҶгҖӮдҪҶжҳҜдёәдәҶдҪҝз”Ёжӣҙж–№дҫҝпјҢжҲ‘们д№ҹеҸҜд»ҘжҠҠиҝҷдёӘиҝҮзЁӢе°ҒиЈ…жҲҗдёәjs组件гҖӮзӣ‘еҗ¬еҠЁз”»жү§иЎҢз»“жқҹпјҢд№ҹйңҖиҰҒдҫқиө–jsгҖӮ
е…·дҪ“зҡ„д»Јз Ғе°ұдёҚиҙҙдәҶпјҢеҗҺйқўдҫӢеӯҗйҮҢйғҪжңүпјҢиҝҷйҮҢиҜҙдёҖдәӣйңҖиҰҒе…іжіЁзҡ„ең°ж–№гҖӮжң¬жқҘпјҢжЈҖжөӢжөҸи§ҲеҷЁжҳҜеҗҰж”ҜжҢҒcss3еҠЁз”»еҸҜд»ҘйҖҡиҝҮеҲӣе»әдёҙж—¶е…ғзҙ пјҢеҲӨж–ӯ'transitionProperty' in el.styleжҳҜеҗҰдёәtrueе°ұеҸҜд»ҘдәҶпјӣдҪҶжҳҜпјҢдёҮжҒ¶зҡ„жөҸи§ҲеҷЁеҺӮе•ҶеүҚзјҖпјҲе°ұжҳҜйӮЈдәӣ-webkit-гҖҒ -moz-гҖҒ-o-гҖҒ-ms-пјүпјҢдҪҝиҝҷдёӘиҝҮзЁӢеҸҳеҫ—еӨҚжқӮеӨҡдәҶгҖӮжңҖеқ‘зҲ№зҡ„жҳҜIEпјҢcssйҮҢеҸҜд»Ҙз”ЁвҖң-ms-transition-propertyвҖқпјҢjsдёӯеҜ№еә”зҡ„styleпјҢеҚҙжҳҜвҖңel.style.msTransitionPropertyвҖқгҖӮQWrapеңЁи®ҫзҪ®cssзҡ„еҮҪж•°дёӯпјҢдјҡе…Ҳи°ғз”ЁStringH.camelizeеҮҪж•°еӨ„зҗҶеұһжҖ§еҗҚпјҢдјҡжҠҠвҖң-ms-xxx-oooвҖқеҸҳжҲҗвҖңMsXxxOooвҖқпјҢIEдёҚи®ӨпјҒе…¶д»–жөҸи§ҲеҷЁеҲҷж— и®әйҰ–еӯ—жҜҚжҳҜеҗҰеӨ§е°ҸйғҪж”ҜжҢҒгҖӮ
иҰҒзӣ‘еҗ¬еҠЁз”»з»“жқҹпјҢwebkitйңҖиҰҒз»ҷеҠЁз”»е…ғзҙ з»‘е®ҡwebkitTransitionEndдәӢ件пјҢfirefoxжҳҜtransitionendпјҢoperaжҳҜoTransitionEndпјҢIEжҳҜMSTransitionEndгҖӮfirefoxж”ҜжҢҒж ҮеҮҶдәӢ件еҗҚпјҢе…¶д»–жөҸи§ҲеҷЁйғҪжҳҜвҖңе°ҸеҶҷеүҚзјҖ+TransitionEndвҖқпјҢе”ҜзӢ¬IEзҡ„msе…ЁйғҪиҰҒеӨ§еҶҷпјҒ
еҘҪеңЁпјҢйҡҸзқҖжөҸи§ҲеҷЁзҡ„еҸ‘еұ•пјҢеӨ§е®¶йҖҗжёҗејҖе§Ӣж”ҜжҢҒж ҮеҮҶеҶҷжі•пјҢж…ўж…ўдёҚеҶҚйңҖиҰҒеҶҷеүҚзјҖдәҶгҖӮжҲ‘иҝҷиҫ№жөӢиҜ•пјҢжңҖж–°зҡ„IE10 for Win7 Pre ReleaseзүҲд№ҹж”ҜжҢҒдәҶж ҮеҮҶеҶҷжі•пјҢжүҖд»ҘjsйңҖиҰҒдјҳе…Ҳе°қиҜ•ж— еүҚзјҖзҡ„з”Ёжі•гҖӮиҜҰз»Ҷзҡ„жғ…еҶөеҸҜд»ҘеҺ»CanIUseзңӢгҖӮ
--- еҲҶеүІзәҝ ---
еҮ з§ҚеҠЁз”»е®һзҺ°йғҪеӨ§жҰӮд»Ӣз»ҚдәҶдёӢпјҢйғҪеҸҜд»Ҙе°ҒиЈ…жҲҗJS组件пјҢжңүдёҖиҮҙзҡ„жҺҘеҸЈж–№дҫҝи°ғз”ЁгҖӮйӮЈд№Ҳе®һйҷ…йЎ№зӣ®дёӯиҜҘеҰӮдҪ•йҖүжӢ©е‘ўпјҹ
д»ҺжөҸи§ҲеҷЁж”ҜжҢҒеәҰжқҘзңӢпјҢйҷӨдәҶ第дёҖз§Қж–№жЎҲпјҢе…¶дҪҷж–№жЎҲйғҪжҳҜжІЎеҠһжі•еңЁдҪҺзүҲжң¬IEдҪҝз”Ёзҡ„гҖӮеҰӮжһңйңҖиҰҒж”ҜжҢҒжӣҙеӨҡжөҸи§ҲеҷЁпјҢеҸҜд»ҘйҮҮз”Ёж–№жЎҲдёҖпјҲQWrapпјүпјӣжҲ–иҖ…дјҳе…ҲдҪҝз”Ёж–№жЎҲдәҢпјҢж–№жЎҲдёҖдҪңдёәйҷҚзә§пјҲJQueryпјүгҖӮеҰӮжһңжҳҜйқўеҗ‘移еҠЁе№іеҸ°пјҢеҸҜд»ҘдҪҝз”Ёж–№жЎҲдёүпјҲZeptoпјүгҖӮ
移еҠЁе№іеҸ°дёҠиғҪз”Ёcss3еҠЁз”»е°ұдёҚиҰҒз”ЁrequestAnimationFrameпјҢеӣ дёәiOS6жүҚејҖе§Ӣж”ҜжҢҒе®ғгҖӮдҪҝз”Ёcss3зҡ„transition+transformпјҢжёІжҹ“ж•ҲзҺҮжҜ”еҠЁз”»callbackйҮҢж”№еҸҳcssеұһжҖ§еҖјй«ҳеҫҲеӨҡгҖӮеҸҰеӨ–пјҢiOSдёҠ移еҠЁжҲ–зј©ж”ҫйЎөйқўж—¶пјҢж“ҚдҪңзҡ„жҳҜtouchејҖе§Ӣж—¶зҡ„жҲӘеұҸпјҢйЎөйқўжҳҜйқҷжӯўдёҚеҠЁзҡ„гҖӮйӮЈд№ҲжқҫејҖжүӢжҢҮпјҢеҸӘжңүcss3еҠЁз”»иғҪиҝһз»ӯж’ӯж”ҫпјҢе…¶д»–дёӨз§Қж–№жЎҲеӣ дёәйғҪжҳҜж №жҚ®ж—¶й—ҙе·®и®Ўз®—иҝӣеәҰпјҢдјҡжҳҺжҳҫзҡ„и·іи·ғеҲ°жҹҗеё§гҖӮ
css3еҠЁз”»жңүдёҖдәӣеҠҹиғҪдёҠзҡ„зјәеӨұпјҢе®ғдёҚж”ҜжҢҒеңЁж’ӯж”ҫжҜҸдёҖеё§ж—¶и§ҰеҸ‘callbackпјҢд№ҹе°ұжҳҜжІЎеҠһжі•зӣ‘жҺ§ж’ӯж”ҫиҝӣеәҰпјҢд№ҹжІЎеҠһжі•жҡӮеҒңе’ҢжҒўеӨҚеҠЁз”»гҖӮдҪҶжҳҜcss3еҠЁз”»з»„件еҸҜд»ҘжҠҠTransformе°ҒиЈ…иҝӣеҺ»пјҢжҸҗдҫӣдёҖдәӣеҫҲиөһзҡ„ж–°еҠҹиғҪпјҡDEMOгҖӮжӣҙеӨҚжқӮзҡ„еҠЁз”»пјҢжҲ–иҖ…жңүжҡӮеҒңж’ӯж”ҫзҡ„йңҖжұӮпјҢйҖҡиҝҮCSS3 AnimationеҸҜд»Ҙе®һзҺ°пјҢдёҚиҝҮжҲ‘们жҡӮж—¶еҫҲе°‘з”ЁеҲ°пјҢжүҖд»ҘжІЎеҒҡе°ҒиЈ…гҖӮ
иҖҢsetIntervalе’ҢrequestAnimationFrameе®һзҺ°зҡ„еҠЁз”»пјҢеңЁж”№еҸҳcssеұһжҖ§ж—¶йңҖиҰҒйўқеӨ–еҒҡжӣҙеӨҡдәӢжғ…пјҢдҫӢеҰӮbackgroundColorйңҖиҰҒиҪ¬еҢ–дёәRгҖҒGгҖҒBдёүдёӘж•°еҖјжқҘеҲҶеҲ«еҸҳжҚўпјӣе…¶е®ғжңүеҚ•дҪҚзҡ„еұһжҖ§еҖјпјҢеҰӮheight:100pxпјҢд№ҹйңҖиҰҒиҪ¬еҢ–дёә{value:100, unit:'px'}иҝҷж ·зҡ„еҪўејҸпјҢеҶҚеҜ№valueиҝӣиЎҢеҸҳжҚўгҖӮдҪҶжҳҜпјҢз”ұдәҺжҜҸдёӘеұһжҖ§йғҪеҸҜд»Ҙеә”з”ЁдёҚеҗҢзҡ„з®—еӯҗпјҢеҸҜд»Ҙз»„еҗҲеҮәзӢ¬зү№зҡ„иҝҗеҠЁиҪЁиҝ№пјҢDEMOгҖӮ
еүҚйқўиҜҙеҲ°еңЁйЎөйқўдёҚеҸҜи§Ғж—¶пјҢжөҸи§ҲеҷЁдјҡиҮӘеҠЁжҸҗй«ҳsetIntervalзҡ„й—ҙйҡ”гҖӮйӮЈеҜ№дәҺrequestAnimationFrameе’Ңcss3еҠЁз”»пјҢжөҸи§ҲеҷЁдјҡжҖҺд№ҲеӨ„зҗҶе‘ўпјҹ
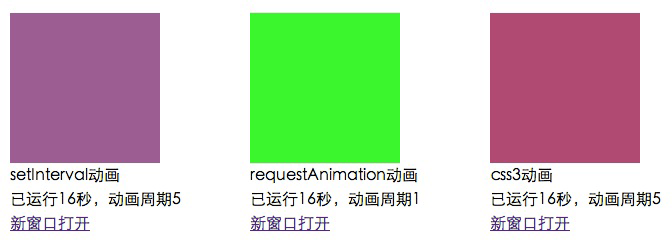 пјҲchrome23пјү
пјҲchrome23пјү
 пјҲfirefox16пјү
пјҲfirefox16пјү
иҝҷдёӘжөӢиҜ•йЎөйқўеј•е…ҘдәҶдёүдёӘiframeпјҢеҜ№еә”жң¬ж–Үдёүз§ҚеҠЁз”»е®һзҺ°пјҢdurationйғҪжҳҜ2sгҖӮ16sзҡ„ж—¶й—ҙеҶ…пјҢеҠЁз”»еә”иҜҘжү§иЎҢ8дёӘе‘ЁжңҹгҖӮйЎөйқўеӨ„дәҺдёҚеҸҜи§Ғж—¶пјҡchromeдёӢпјҢз”ЁrequestAnimationFrameе®һзҺ°зҡ„еҠЁз”»е®Ңе…Ёиў«еҒңжӯўж’ӯж”ҫпјӣе…¶д»–еҠЁз”»жү§иЎҢе‘ЁжңҹйғҪжңүдёҖе®ҡзЁӢеәҰдёӢйҷҚгҖӮжөӢиҜ•ең°еқҖеңЁиҝҷйҮҢпјҢеӨ§е®¶еҸҜд»ҘиҮӘе·ұиҜ•иҜ•~
жң¬ж–Үй“ҫжҺҘпјҡhttps://imququ.com/post/js-animation.htmlпјҢеҸӮдёҺиҜ„и®әгҖӮ



зӣёе…іжҺЁиҚҗ
### е®ўжҲ·з«ҜиҪҜ件GUIејҖеҸ‘жҠҖжңҜжј«и°ҲпјҡеҺҹз”ҹдёҺи·Ёе№іеҸ°и§ЈеҶіж–№жЎҲеҲҶжһҗ #### еҺҹз”ҹејҖеҸ‘жҠҖжңҜ ##### MicrosoftйҳөиҗҘ **WinForm** - **з®Җд»Ӣ**пјҡWinFormжҳҜ.NETжЎҶжһ¶зҡ„дёҖйғЁеҲҶпјҢз”ЁдәҺеҲӣе»әWindowsеӣҫеҪўз”ЁжҲ·з•Ңйқўзҡ„еә”з”ЁзЁӢеәҸгҖӮе®ғжҳҜ.NET ...
еңЁз”ЁжҲ·дҪ“йӘҢж–№йқўпјҢJava FXдёҚд»…ж”ҜжҢҒдј з»ҹGUI组件пјҢиҝҳжҸҗдҫӣдәҶдё°еҜҢзҡ„еӣҫеҪўгҖҒеҠЁз”»е’ҢеӨҡеӘ’дҪ“еӨ„зҗҶиғҪеҠӣпјҢдҪҝеҫ—ејҖеҸ‘иҖ…еҸҜд»ҘеҲӣе»әи§Ҷи§үдёҠеј•дәәе…Ҙиғңзҡ„еә”з”ЁпјҢеҗҢж—¶дҝқжҢҒдәҶжөҒз•…зҡ„з”ЁжҲ·дәӨдә’дҪ“йӘҢгҖӮ Java FXзҡ„жҠҖжңҜжһ¶жһ„з”ұдёүдёӘдё»иҰҒйғЁеҲҶз»„жҲҗпјҡJava ...
Flash зҪ‘йЎөи®ҫи®ЎжҠҖжңҜжј«и°Ҳ жң¬ж–Үе°Ҷеӣҙз»• Flash зҪ‘йЎөи®ҫи®ЎжҜ•дёҡи®әж–Үи®ҫи®Ўзҡ„жҠҖжңҜиғҢжҷҜгҖҒи®ҫи®ЎзҗҶеҝөгҖҒжҰӮиҰҒи®ҫи®ЎгҖҒиҜҰз»Ҷи®ҫи®ЎгҖҒжңҖеҗҺж•Ҳжһңеұ•зӨәзӯүж–№йқўеҶ…е®№иҝӣиЎҢиҜҰз»Ҷзҡ„д»Ӣз»ҚпјҢж—ЁеңЁдёәиҜ»иҖ…жҸҗдҫӣ Flash зҪ‘йЎөи®ҫи®Ўзҡ„жҠҖжңҜиғҢжҷҜгҖҒи®ҫи®ЎзҗҶеҝөгҖҒи®ҫи®ЎжҖқи·Ҝ...
jQueryеә“дёәWebејҖеҸ‘иҖ…жҸҗдҫӣдәҶдёҖз§Қз®ҖеҚ•гҖҒй«ҳж•Ҳзҡ„ж–№ејҸжқҘеӨ„зҗҶJavaScriptдәӢ件гҖҒеҠЁз”»е’ҢAjaxдәӨдә’гҖӮеңЁз”өе•ҶзҪ‘з«ҷжҲ–дә§е“Ғеұ•зӨәйЎөйқўдёӯпјҢдёәдәҶеўһејәз”ЁжҲ·дҪ“йӘҢпјҢеёёеёёдјҡдҪҝз”ЁеҲ°ж”ҫеӨ§й•ңж•ҲжһңгҖӮиҝҷз§Қж•Ҳжһңе…Ғи®ёз”ЁжҲ·еңЁдёҚзҰ»ејҖдё»йЎөйқўзҡ„жғ…еҶөдёӢпјҢйҖҡиҝҮ...
еҶ…е®№жҰӮиҰҒпјҡжң¬ж–ҮиҜҰз»Ҷд»Ӣз»ҚдәҶеҹәдәҺиҘҝй—ЁеӯҗS7-200 PLCе’Ңз»„жҖҒзҺӢиҪҜ件жһ„е»әзҡ„е…«еұӮз”өжўҜжҺ§еҲ¶зі»з»ҹгҖӮйҰ–е…Ҳйҳҗиҝ°дәҶзі»з»ҹзҡ„硬件й…ҚзҪ®пјҢеҢ…жӢ¬PLCзҡ„IOеҲҶй…Қзӯ–з•ҘпјҢеҰӮиҫ“е…Ҙиҫ“еҮәдҝЎеҸ·зҡ„е…·дҪ“еҲҶй…ҚеҸҠе…¶йҮҚиҰҒжҖ§гҖӮжҺҘзқҖж·ұе…ҘжҺўи®ЁдәҶжўҜеҪўеӣҫзј–зЁӢйҖ»иҫ‘пјҢж¶өзӣ–еӨ–е‘јдҝЎеҸ·еӨ„зҗҶгҖҒиҪҝеҺўиҝҗеҠЁжҺ§еҲ¶д»ҘеҸҠжҘјеұӮеҲӨж–ӯзӯүе…ій”®зҺҜиҠӮгҖӮйҡҸеҗҺи®Іи§ЈдәҶз»„жҖҒзҺӢзҡ„з”»йқўи®ҫи®ЎпјҢеҢ…жӢ¬еҠЁз”»ж•Ҳжһңзҡ„е®һзҺ°ж–№жі•пјҢеҰӮжҘјеұӮжҢүй’®з»‘е®ҡгҖҒиҪҝеҺўз§»еҠЁеҠЁз”»е’Ңй—ЁејҖеҗҲж•ҲжһңзӯүгҖӮжңҖеҗҺеҲҶдә«дәҶдёҖдәӣи°ғиҜ•з»ҸйӘҢе’ҢжіЁж„ҸдәӢйЎ№пјҢеҰӮжЁЎжӢҹеӣ°дәәеңәжҷҜгҖҒйҳІжҠ–йҖ»иҫ‘гҖҒжҺҘзәҝиүәжңҜзӯүгҖӮ йҖӮеҗҲдәәзҫӨпјҡд»ҺдәӢиҮӘеҠЁеҢ–жҺ§еҲ¶йўҶеҹҹзҡ„е·ҘзЁӢеёҲе’ҢжҠҖжңҜдәәе‘ҳпјҢе°Өе…¶жҳҜеҜ№PLCзј–зЁӢе’Ңз»„жҖҒиҪҜ件жңүдёҖе®ҡеҹәзЎҖзҡ„дәәзҫӨгҖӮ дҪҝз”ЁеңәжҷҜеҸҠзӣ®ж ҮпјҡйҖӮз”ЁдәҺйңҖиҰҒи®ҫи®Ўе’Ңе®һж–Ҫе°ҸеһӢз”өжўҜжҺ§еҲ¶зі»з»ҹзҡ„е·ҘзЁӢйЎ№зӣ®гҖӮдё»иҰҒзӣ®ж ҮжҳҜеё®еҠ©иҜ»иҖ…жҺҢжҸЎPLCзј–зЁӢжҠҖе·§гҖҒз»„жҖҒз”»йқўи®ҫи®Ўж–№жі•д»ҘеҸҠзі»з»ҹиҒ”и°ғз»ҸйӘҢпјҢд»ҺиҖҢжҸҗй«ҳйЎ№зӣ®зҡ„жҲҗеҠҹзҺҮгҖӮ е…¶д»–иҜҙжҳҺпјҡж–ҮдёӯжҸҗдҫӣдәҶиҜҰз»Ҷзҡ„д»Јз ҒзүҮж®өе’Ңи°ғиҜ•жҠҖе·§пјҢжңүеҠ©дәҺиҜ»иҖ…жӣҙеҘҪең°зҗҶи§Је’Ңеә”з”Ёзӣёе…ізҹҘиҜҶзӮ№гҖӮжӯӨеӨ–пјҢиҝҳејәи°ғдәҶе®үе…ЁжҖ§е’ҢеҸҜйқ жҖ§ж–№йқўзҡ„иҖғйҮҸпјҢеҰӮжҖҘеҒңжҢүй’®зҡ„жӯЈзЎ®жҺҘе…Ҙе’Ң硬件дә’й”Ғи®ҫи®ЎзӯүгҖӮ
еҶ…е®№жҰӮиҰҒпјҡжң¬ж–Үж·ұе…ҘжҺўи®ЁдәҶж— дәәй©ҫ驶иҪҰиҫҶдҪҝз”ЁеҠЁеҠӣеӯҰMPCпјҲжЁЎеһӢйў„жөӢжҺ§еҲ¶пјүз®—жі•иҝӣиЎҢиӣҮеҪўзәҝи·Ҝеҫ„и·ҹиёӘзҡ„жҠҖжңҜз»ҶиҠӮгҖӮйҰ–е…Ҳд»Ӣз»ҚдәҶиӣҮеҪўзәҝзҡ„зү№зӮ№еҸҠе…¶еҜ№ж— дәәй©ҫ驶иҪҰиҫҶеёҰжқҘзҡ„жҢ‘жҲҳпјҢйҡҸеҗҺиҜҰз»Ҷи®Іи§ЈдәҶеҠЁеҠӣеӯҰMPCз®—жі•зҡ„еҹәзЎҖзҗҶи®әпјҢеҢ…жӢ¬иҪҰиҫҶзҠ¶жҖҒиЎЁзӨәгҖҒиҝҗеҠЁж–№зЁӢе»әжЁЎд»ҘеҸҠжҺ§еҲ¶иҫ“е…Ҙзҡ„йҖүжӢ©гҖӮжҺҘзқҖйҮҚзӮ№йҳҗиҝ°дәҶеҰӮдҪ•йҖҡиҝҮе®ҡд№үеҗҲйҖӮзҡ„зӣ®ж ҮеҮҪ数并еҠ е…ҘйҖӮеҪ“зҡ„зәҰжқҹжқЎд»¶жқҘдјҳеҢ–MPCз®—жі•пјҢдҪҝе…¶иғҪеӨҹй«ҳж•Ҳең°е®ҢжҲҗиӣҮеҪўзәҝи·Ҝеҫ„и·ҹиёӘд»»еҠЎгҖӮжӯӨеӨ–пјҢж–Үдёӯиҝҳи®Ёи®әдәҶдёҖдәӣеёёи§Ғзҡ„й”ҷиҜҜеҒҡжі•е’ҢжҠҖжңҜж”№иҝӣжҺӘж–ҪпјҢеҰӮеј•е…ҘиҲӘеҗ‘и§’иҜҜе·®иЎҘеҒҝйЎ№гҖҒйҮҮз”ЁжқҫејӣеҸҳйҮҸеӨ„зҗҶзәҰжқҹжқЎд»¶зӯүгҖӮжңҖеҗҺпјҢдҪңиҖ…еҲҶдә«дәҶеӨҡдёӘе®һз”Ёзҡ„е°ҸжҠҖе·§пјҢдҫӢеҰӮйў„жөӢж—¶еҹҹеҶ…зҡ„йҖҹеәҰйҖӮй…Қе’Ңе№іж»‘еӨ„зҗҶгҖҒйҖӮеҪ“йҷҚдҪҺжҺ§еҲ¶йў‘зҺҮд»ҘжҸҗй«ҳи·ҹиёӘзІҫеәҰзӯүгҖӮ йҖӮеҗҲдәәзҫӨпјҡеҜ№ж— дәәй©ҫ驶жҠҖжңҜе’ҢжҺ§еҲ¶з®—жі•ж„ҹе…ҙи¶Јзҡ„з§‘з ”дәәе‘ҳгҖҒе·ҘзЁӢеёҲеҸҠй«ҳж ЎеӯҰз”ҹгҖӮ дҪҝз”ЁеңәжҷҜеҸҠзӣ®ж ҮпјҡйҖӮз”ЁдәҺз ”з©¶ж— дәәй©ҫ驶иҪҰиҫҶи·Ҝеҫ„规еҲ’дёҺжҺ§еҲ¶йўҶеҹҹзҡ„йЎ№зӣ®ејҖеҸ‘пјҢж—ЁеңЁеё®еҠ©иҜ»иҖ…жҺҢжҸЎеҠЁеҠӣеӯҰMPCз®—жі•зҡ„е…·дҪ“еә”з”Ёж–№жі•пјҢд»ҺиҖҢжӣҙеҘҪең°и§ЈеҶіе®һйҷ…е·ҘзЁӢй—®йўҳгҖӮ е…¶д»–иҜҙжҳҺпјҡж–Үз« дёҚд»…жҸҗдҫӣдәҶиҜҰз»Ҷзҡ„зҗҶи®әжҺЁеҜје’Ңд»Јз Ғе®һзҺ°пјҢиҝҳз»“еҗҲе…·дҪ“жЎҲдҫӢиҝӣиЎҢдәҶе……еҲҶзҡ„е®һйӘҢйӘҢиҜҒпјҢзЎ®дҝқжүҖжҸҗеҮәзҡ„и§ЈеҶіж–№жЎҲе…·жңүиҫғй«ҳзҡ„еҸҜиЎҢжҖ§е’ҢеҸҜйқ жҖ§гҖӮ
еҶ…е®№жҰӮиҰҒпјҡжң¬ж–ҮиҜҰз»Ҷд»Ӣз»ҚдәҶBYVINпјҲжҜ”еҫ·ж–Үпјүз”өеҠЁеӣӣиҪ®иҪҰжҺ§еҲ¶еҷЁзҡ„жҠҖжңҜз»ҶиҠӮпјҢж¶өзӣ–дәҶ硬件и®ҫи®Ўе’ҢиҪҜ件е®һзҺ°дёӨеӨ§йғЁеҲҶгҖӮ硬件方йқўпјҢжҸҗдҫӣдәҶPCBж–Ү件е’ҢPDFеҺҹзҗҶеӣҫпјҢеұ•зӨәдәҶз”өи·ҜжқҝеёғеұҖгҖҒе…ғ件дҪҚзҪ®еҸҠз”өи·ҜиҝһжҺҘе…ізі»гҖӮиҪҜ件方йқўпјҢд»Јз Ғз»“жһ„жё…жҷ°пјҢжЁЎеқ—еҢ–и®ҫи®ЎиүҜеҘҪпјҢеҢ…жӢ¬еҲқе§ӢеҢ–гҖҒйҖҹеәҰж•°жҚ®еӨ„зҗҶгҖҒPWMй…ҚзҪ®гҖҒж•…йҡңдҝқжҠӨжңәеҲ¶зӯүеҠҹиғҪжЁЎеқ—гҖӮж–ҮдёӯиҝҳжҸҗеҲ°дәҶдёҖдәӣзӢ¬зү№зҡ„и®ҫи®Ўз»ҶиҠӮпјҢеҰӮPWMжӯ»еҢәиЎҘеҒҝгҖҒж•…йҡңеҲҶзә§еӨ„зҗҶгҖҒеҚЎе°”жӣјж»Өжіўдј°з®—з”өжұ з”өйҮҸзӯүгҖӮжӯӨеӨ–пјҢд»Јз Ғд»“еә“дёӯиҝҳеҢ…жӢ¬дәҶиҜҰз»Ҷзҡ„жіЁйҮҠе’Ңи°ғиҜ•жҠҖе·§пјҢеҰӮCANжҖ»зәҝе®һж—¶ж•°жҚ®дј иҫ“гҖҒ硬件зә§е…іж–ӯ+иҪҜ件зҠ¶жҖҒжңәиҒ”еҠЁзӯүгҖӮ йҖӮеҗҲдәәзҫӨпјҡе…·еӨҮдёҖе®ҡеөҢе…ҘејҸејҖеҸ‘еҹәзЎҖзҡ„з ”еҸ‘дәәе‘ҳпјҢе°Өе…¶жҳҜеҜ№STM32F4зі»еҲ—еҚ•зүҮжңәе’Ңз”өеҠЁиҪҰиҫҶжҺ§еҲ¶зі»з»ҹж„ҹе…ҙи¶Јзҡ„е·ҘзЁӢеёҲгҖӮ дҪҝз”ЁеңәжҷҜеҸҠзӣ®ж ҮпјҡйҖӮз”ЁдәҺеёҢжңӣж·ұе…ҘдәҶи§Јз”өеҠЁеӣӣиҪ®иҪҰжҺ§еҲ¶еҷЁи®ҫи®ЎеҺҹзҗҶе’ҢжҠҖжңҜе®һзҺ°зҡ„з ”з©¶дәәе‘ҳе’ҢејҖеҸ‘иҖ…гҖӮзӣ®ж ҮжҳҜжҺҢжҸЎз”өеҠЁеӣӣиҪ®иҪҰжҺ§еҲ¶еҷЁзҡ„硬件и®ҫи®Ўж–№жі•е’ҢиҪҜ件编зЁӢжҠҖе·§пјҢжҸҗеҚҮе®һйҷ…йЎ№зӣ®ејҖеҸ‘иғҪеҠӣгҖӮ е…¶д»–иҜҙжҳҺпјҡжң¬ж–ҮдёҚд»…жҸҗдҫӣдәҶд»Јз Ғе’ҢжҠҖжңҜз»ҶиҠӮпјҢиҝҳеҲҶдә«дәҶи®ёеӨҡе®һжҲҳз»ҸйӘҢе’Ңи®ҫи®ЎжҖқи·ҜпјҢжңүеҠ©дәҺиҜ»иҖ…жӣҙеҘҪең°зҗҶи§Је’Ңеә”з”ЁиҝҷдәӣжҠҖжңҜгҖӮ
еҶ…е®№жҰӮиҰҒпјҡжң¬ж–ҮиҜҰз»Ҷд»Ӣз»ҚдәҶеҹәдәҺS7 300 PLCе’Ңз»„жҖҒзҺӢзҡ„иҪҰй—ЁеҢ…иҫ№жңәжҺ§еҲ¶зі»з»ҹзҡ„и®ҫи®ЎдёҺе®һзҺ°гҖӮдё»иҰҒеҶ…е®№ж¶өзӣ–I/OеҲҶй…ҚгҖҒжўҜеҪўеӣҫзј–зЁӢгҖҒжҺҘзәҝеӣҫи®ҫи®Ўд»ҘеҸҠз»„жҖҒзҺӢзҡ„з”»йқўжһ„е»әгҖӮж–ҮдёӯйҖҡиҝҮе…·дҪ“зҡ„е®һдҫӢеұ•зӨәдәҶеҰӮдҪ•еҲ©з”ЁPLCе®һзҺ°иҪҰй—ЁеҢ…иҫ№жңәзҡ„зІҫзЎ®жҺ§еҲ¶пјҢеҢ…жӢ¬еҗҜеҠЁйҖ»иҫ‘гҖҒз”өжңәдёҺж°”зјёжҺ§еҲ¶йҖ»иҫ‘зӯүгҖӮжӯӨеӨ–пјҢиҝҳи®Ёи®әдәҶжҺҘзәҝеӣҫдёӯзҡ„йҳІе№Іжү°жҺӘж–ҪгҖҒжўҜеҪўеӣҫдёӯзҡ„зү№ж®ҠйҖ»иҫ‘и®ҫи®Ўд»ҘеҸҠз»„жҖҒзҺӢдёӯзҡ„еҠЁжҖҒж•Ҳжһңе®һзҺ°ж–№жі•гҖӮжңҖз»ҲпјҢйҖҡиҝҮеҗҲзҗҶзҡ„硬件й…ҚзҪ®е’ҢиҪҜ件编зЁӢпјҢе®һзҺ°дәҶй«ҳж•ҲгҖҒзЁіе®ҡдё”зӣҙи§Ӯзҡ„иҪҰй—ЁеҢ…иҫ№жңәжҺ§еҲ¶зі»з»ҹгҖӮ йҖӮеҗҲдәәзҫӨпјҡд»ҺдәӢе·ҘдёҡиҮӘеҠЁеҢ–йўҶеҹҹзҡ„е·ҘзЁӢеёҲе’ҢжҠҖжңҜдәәе‘ҳпјҢе°Өе…¶жҳҜзҶҹжӮүPLCзј–зЁӢе’Ңз»„жҖҒиҪҜ件дҪҝз”Ёзҡ„дё“дёҡдәәеЈ«гҖӮ дҪҝз”ЁеңәжҷҜеҸҠзӣ®ж ҮпјҡйҖӮз”ЁдәҺжұҪиҪҰеҲ¶йҖ з”ҹдә§зәҝдёӯзҡ„иҪҰй—ЁеҢ…иҫ№жңәжҺ§еҲ¶зі»з»ҹзҡ„ејҖеҸ‘дёҺз»ҙжҠӨгҖӮзӣ®ж ҮжҳҜжҸҗй«ҳз”ҹдә§и®ҫеӨҮзҡ„иҮӘеҠЁеҢ–ж°ҙе№іпјҢеўһејәзі»з»ҹзҡ„зЁіе®ҡжҖ§е’ҢеҸҜйқ жҖ§пјҢеҮҸе°‘дәәе·Ҙе№Ійў„пјҢжҸҗеҚҮз”ҹдә§ж•ҲзҺҮгҖӮ е…¶д»–иҜҙжҳҺпјҡжң¬ж–ҮдёҚд»…жҸҗдҫӣдәҶиҜҰз»Ҷзҡ„зҗҶи®әи®Іи§ЈпјҢиҝҳеҢ…жӢ¬дәҶи®ёеӨҡе®һйҷ…ж“ҚдҪңдёӯзҡ„з»ҸйӘҢе’ҢжҠҖе·§пјҢжңүеҠ©дәҺиҜ»иҖ…жӣҙеҘҪең°зҗҶи§Је’Ңеә”з”Ёзӣёе…іжҠҖжңҜгҖӮ
еҹәдәҺC#е®һзҺ°зҡ„з…§зүҮиҮӘеҠЁеҲҶжӢЈзЁӢеәҸ+жәҗз Ғ+йЎ№зӣ®ж–ҮжЎЈпјҢйҖӮеҗҲжҜ•дёҡи®ҫи®ЎгҖҒиҜҫзЁӢи®ҫи®ЎгҖҒйЎ№зӣ®ејҖеҸ‘гҖӮйЎ№зӣ®жәҗз Ғе·Із»ҸиҝҮдёҘж јжөӢиҜ•пјҢеҸҜд»Ҙж”ҫеҝғеҸӮиҖғ并еңЁжӯӨеҹәзЎҖдёҠ延申дҪҝз”ЁпјҢиҜҰжғ…и§Ғmdж–ҮжЎЈ з®ҖеҚ•жҳ“з”Ёзҡ„з…§зүҮиҮӘеҠЁеҲҶзұ»е·Ҙе…·пјҢе®ғиғҪеӨҹиҮӘеҠЁиҜ»еҸ–з…§зүҮзҡ„жӢҚж‘„ж—ҘжңҹдҝЎжҒҜпјҢ并жҢүз…§е№ҙжңҲз»“жһ„е°Ҷз…§зүҮж•ҙзҗҶеҲ°еҜ№еә”зҡ„ж–Ү件еӨ№дёӯпјҢеё®еҠ©з”ЁжҲ·иҪ»жқҫз®ЎзҗҶеӨ§йҮҸз…§зүҮж–Ү件гҖӮ дё»иҰҒеҠҹиғҪ иҮӘеҠЁеҲҶзұ»пјҡж №жҚ®з…§зүҮзҡ„жӢҚж‘„ж—¶й—ҙпјҢиҮӘеҠЁе°Ҷз…§зүҮеҲҶзұ»еҲ°еҜ№еә”зҡ„е№ҙжңҲж–Ү件еӨ№дёӯ еӨҡж јејҸж”ҜжҢҒпјҡж”ҜжҢҒ JPGгҖҒJPEGгҖҒPNGгҖҒGIF зӯүеёёи§ҒеӣҫзүҮж јејҸ жҷәиғҪеӨ„зҗҶпјҡ иҮӘеҠЁиҜ»еҸ–з…§зүҮ EXIF дҝЎжҒҜиҺ·еҸ–жӢҚж‘„ж—Ҙжңҹ еҪ“ж— жі•иҜ»еҸ– EXIF дҝЎжҒҜж—¶пјҢиҮӘеҠЁдҪҝз”Ёж–Ү件еҲӣе»әж—¶й—ҙ жҷәиғҪеӨ„зҗҶж–Ү件йҮҚеҗҚеҶІзӘҒ й«ҳж•ҲеӨ„зҗҶпјҡ йҮҮ用并иЎҢеӨ„зҗҶжҠҖжңҜпјҢжҸҗй«ҳеӨ§йҮҸз…§зүҮзҡ„еӨ„зҗҶйҖҹеәҰ дјҳеҢ–ж–Ү件иҜ»еҸ–е’Ң移еҠЁж“ҚдҪңпјҢеҮҸе°‘зі»з»ҹиө„жәҗеҚ з”Ё иҮӘеҠЁи°ғж•ҙ并иЎҢд»»еҠЎж•°йҮҸпјҢе№іиЎЎзі»з»ҹиҙҹиҪҪ
KUKAжңәеҷЁдәәзӣёе…іж–ҮжЎЈ
Tripple Farm:Match 3 Combination Game Complete Project еҗҲжҲҗе°Ҹй•Үдёүж¶ҲUnityеҗҲжҲҗж¶ҲйҷӨжёёжҲҸйЎ№зӣ®жёёжҲҸжҸ’件模зүҲC# ж”ҜжҢҒUnity2020.3.4жҲ–жӣҙй«ҳ жӮЁзҹҘйҒ“еғҸдёүеҗҲй•Үиҝҷж ·зҡ„и‘—еҗҚзӣҠжҷәжёёжҲҸпјҢ并且жӮЁжғіеҲ¶дҪңдёҖдёӘиҮӘе·ұзҡ„жёёжҲҸгҖӮе°ұжҳҜиҝҷж ·гҖӮиҝҷдёӘеҢ…жӯЈеҘҪйҖӮеҗҲжӮЁгҖӮ иҝҷжҳҜдёҖдёӘе®Ңж•ҙзҡ„йЎ№зӣ®пјҢжӮЁеҸҜд»ҘеңЁйӣ¶еҲҶй’ҹеҶ…е°Ҷе…¶дёҠдј еҲ° appstore жҲ– googleplay е•Ҷеә—гҖӮ еҹәжң¬и§„еҲҷпјҡ 3дёӘжҲ–д»ҘдёҠзӣёеҗҢзҡ„йҒ“е…·еҸҜд»ҘеҢ№й…ҚеҚҮзә§дёәж–°зҡ„йҒ“е…·гҖӮеҠЁзү©еҰӮжһңиў«еӣ°дҪҸпјҢд№ҹеҸҜд»ҘеҗҲ并гҖӮ зҫҪжҜӣпјҡ -移еҠЁпјҲandroid/iosпјүе°ұз»ӘгҖӮ - еҢ…еҗ«жүҖжңүжәҗд»Јз ҒгҖӮ -и¶…иҝҮ 12 еә§е»әзӯ‘/еҶӣеӣўйңҖиҰҒеҚҮзә§гҖӮ -дёүз§Қзү№ж®Ҡзү©е“ҒеҸҜд»ҘжҸҗдҫӣеё®еҠ©гҖӮ - дёүдёӘдёҚеҗҢзҡ„дё»йўҳпјҲеңәжҷҜе’ҢеҠЁзү©пјү -unity iap ж”ҜжҢҒ -Unity UI -е№ҝе‘ҠдҪҚе·ІеҮҶеӨҮеҘҪ -еҢ…еҗ«иҜҰз»Ҷж–ҮжЎЈ
еҶ…е®№жҰӮиҰҒпјҡжң¬ж–ҮиҜҰз»Ҷд»Ӣз»ҚдәҶеҹәдәҺдёӢеһӮжҺ§еҲ¶зҡ„дёүзӣёйҖҶеҸҳеҷЁз”өеҺӢз”өжөҒеҸҢй—ӯзҺҜжҺ§еҲ¶зҡ„д»ҝзңҹж–№жі•еҸҠе…¶еңЁMATLAB/Simulinkе’ҢPLECSдёӯзҡ„е…·дҪ“е®һзҺ°гҖӮйҰ–е…Ҳи§ЈйҮҠдәҶдёӢеһӮжҺ§еҲ¶зҡ„еҹәжң¬еҺҹзҗҶпјҢеҚіжңүеҠҹи°ғйў‘е’Ңж— еҠҹи°ғеҺӢпјҢ并з»ҷеҮәдәҶзӣёеә”зҡ„ж•°еӯҰиЎЁиҫҫејҸгҖӮйҡҸеҗҺи®Ёи®әдәҶз”өеҺӢзҺҜе’Ңз”өжөҒзҺҜзҡ„и®ҫи®ЎдёҺеҸӮж•°ж•ҙе®ҡпјҢејәи°ғдәҶдёӨиҖ…еёҰе®Ҫзҡ„е·®ејӮд»ҘеҸҠPIжҺ§еҲ¶еҷЁзҡ„еҸӮж•°йҖүжӢ©гҖӮж–ҮдёӯиҝҳжҸҗеҲ°дәҶдёҖдәӣеёёи§Ғзҡ„и°ғиҜ•жҠҖе·§пјҢеҰӮй”ҒзӣёзҺҜзҡ„е“Қеә”йҖҹеәҰгҖҒLCж»ӨжіўеҷЁзҡ„и°җжҢҜзӮ№еӨ„зҗҶгҖҒжӯ»еҢәж—¶й—ҙи®ҫзҪ®зӯүгҖӮжӯӨеӨ–пјҢдҪңиҖ…еҲҶдә«дәҶдёҖдәӣе®һз”Ёзҡ„з»ҸйӘҢпјҢеҰӮйҒҝе…ҚиҝҮеәҰж»ӨжіўгҖҒеҗҲзҗҶи®ҫзҪ®йҮҮж ·е‘Ёжңҹе’ҢдёӢеһӮзі»ж•°зӯүгҖӮжңҖеҗҺпјҢйҖҡиҝҮзӘҒеҠ иҙҹиҪҪжөӢиҜ•еұ•зӨәдәҶзі»з»ҹзҡ„еҠЁжҖҒе“Қеә”жҖ§иғҪгҖӮ йҖӮеҗҲдәәзҫӨпјҡд»ҺдәӢз”өеҠӣз”өеӯҗгҖҒеҫ®з”өзҪ‘з ”з©¶зҡ„жҠҖжңҜдәәе‘ҳпјҢе°Өе…¶жҳҜжңүдёҖе®ҡMATLAB/Simulinkе’ҢPLECSдҪҝз”Ёз»ҸйӘҢзҡ„з ”еҸ‘дәәе‘ҳгҖӮ дҪҝз”ЁеңәжҷҜеҸҠзӣ®ж ҮпјҡйҖӮз”ЁдәҺеёҢжңӣж·ұе…ҘдәҶи§ЈдёүзӣёйҖҶеҸҳеҷЁдёӢеһӮжҺ§еҲ¶жңәеҲ¶зҡ„з ”з©¶дәәе‘ҳе’ҢжҠҖжңҜдәәе‘ҳпјҢж—ЁеңЁеё®еҠ©д»–们жҺҢжҸЎз”өеҺӢз”өжөҒеҸҢй—ӯзҺҜжҺ§еҲ¶зҡ„е…·дҪ“е®һзҺ°ж–№жі•пјҢжҸҗй«ҳд»ҝзңҹзҡ„еҮҶзЎ®жҖ§е’Ңж•ҲзҺҮгҖӮ е…¶д»–иҜҙжҳҺпјҡжң¬ж–ҮдёҚд»…жҸҗдҫӣдәҶиҜҰз»Ҷзҡ„зҗҶи®әи®Іи§ЈпјҢиҝҳз»“еҗҲдәҶеӨ§йҮҸзҡ„е®һжҲҳз»ҸйӘҢе’Ңи°ғиҜ•жҠҖе·§пјҢжңүеҠ©дәҺиҜ»иҖ…жӣҙеҘҪең°зҗҶи§Је’Ңеә”з”Ёзӣёе…іжҠҖжңҜгҖӮ
еҶ…е®№жҰӮиҰҒпјҡжң¬ж–ҮиҜҰз»Ҷи®°еҪ•дәҶдҪңиҖ…еҜ№EP100дјәжңҚй©ұеҠЁеҷЁиҝӣиЎҢзҡ„дёҖзі»еҲ—дјҳеҢ–е’Ңж”№иҝӣгҖӮдё»иҰҒеҶ…е®№еҢ…жӢ¬пјҡдҝ®еӨҚеҺҹеҺӮд»Јз Ғдёӯзҡ„еӨҡдёӘиҮҙе‘ҪBugпјҢеҰӮе®ҡж—¶еҷЁй…ҚзҪ®еҶІзӘҒгҖҒPWMдҝЎеҸ·дёҚи§ҰеҸ‘гҖҒз”өжөҒйҮҮж ·иҜҜе·®зӯүй—®йўҳпјӣдјҳеҢ–з”өжңәеҗҜеҠЁгҖҒеўһйҮҸзј–з ҒеҷЁжүҫйӣ¶гҖҒдёІеҸЈйҖҡдҝЎгҖҒзӣёеәҸеҸҚиҪ¬зӯүеҠҹиғҪпјӣ并еҜ№зЎ¬д»¶иҝӣиЎҢдәҶж”№иҝӣпјҢеҰӮи°ғж•ҙMOSз®ЎеёғеұҖгҖҒдјҳеҢ–ж»Өжіўз”өе®№дҪҚзҪ®зӯүгҖӮйҖҡиҝҮиҝҷдәӣж”№еҠЁпјҢжҳҫи‘—жҸҗй«ҳдәҶзі»з»ҹзҡ„зЁіе®ҡжҖ§гҖҒзІҫеәҰе’ҢеҸҜйқ жҖ§гҖӮ йҖӮеҗҲдәәзҫӨпјҡе…·жңүдёҖе®ҡеөҢе…ҘејҸзі»з»ҹејҖеҸ‘з»ҸйӘҢзҡ„е·ҘзЁӢеёҲпјҢе°Өе…¶жҳҜзҶҹжӮүSTM32еҚ•зүҮжңәе’ҢдјәжңҚжҺ§еҲ¶зі»з»ҹзҡ„жҠҖжңҜдәәе‘ҳгҖӮ дҪҝз”ЁеңәжҷҜеҸҠзӣ®ж ҮпјҡйҖӮз”ЁдәҺйңҖиҰҒеҜ№зҺ°жңүдјәжңҚй©ұеҠЁеҷЁиҝӣиЎҢжҖ§иғҪдјҳеҢ–е’ҢжҠҖжңҜж”№йҖ зҡ„йЎ№зӣ®гҖӮдё»иҰҒзӣ®ж ҮжҳҜжҸҗй«ҳзі»з»ҹзҡ„зЁіе®ҡжҖ§е’ҢзІҫеәҰпјҢи§ЈеҶіеҺҹеҺӮд»Јз ҒдёӯеӯҳеңЁзҡ„еҗ„з§Қй—®йўҳпјҢзЎ®дҝқдјәжңҚй©ұеҠЁеҷЁиғҪеӨҹеңЁй«ҳиҙҹиҪҪжқЎд»¶дёӢжӯЈеёёе·ҘдҪңгҖӮ е…¶д»–иҜҙжҳҺпјҡж–ҮдёӯжҸҗдҫӣдәҶиҜҰз»Ҷзҡ„д»Јз ҒзүҮж®өе’Ң硬件改иҝӣжҺӘж–ҪпјҢеё®еҠ©иҜ»иҖ…жӣҙеҘҪең°зҗҶи§Је’Ңеә”з”Ёзӣёе…іжҠҖжңҜгҖӮеҗҢж—¶пјҢдҪңиҖ…еҲҶдә«дәҶи®ёеӨҡе®һйҷ…ж“ҚдҪңдёӯзҡ„з»ҸйӘҢе’ҢжҠҖе·§пјҢеҜ№дәҺд»ҺдәӢзұ»дјјйЎ№зӣ®зҡ„е·ҘзЁӢеёҲе…·жңүеҫҲй«ҳзҡ„еҸӮиҖғд»·еҖјгҖӮ
еҶ…е®№жҰӮиҰҒпјҡжң¬ж–ҮиҜҰз»Ҷд»Ӣз»ҚдәҶе…үеӮЁзӣҙжөҒеҫ®з”өзҪ‘дёӯеҲ©з”ЁSimulinkиҝӣиЎҢд»ҝзңҹе»әжЁЎзҡ„ж–№жі•пјҢйҮҚзӮ№жҺўи®ЁдәҶе…үдјҸзі»з»ҹзҡ„жңҖеӨ§еҠҹзҺҮзӮ№и·ҹиёӘ(MPPT)жҺ§еҲ¶д»ҘеҸҠи“„з”өжұ е’Ңи¶…зә§з”өе®№зҡ„еҠҹзҺҮеҲҶй…Қзӯ–з•ҘгҖӮж–ҮдёӯжҸҗдҫӣдәҶе…·дҪ“зҡ„MATLABд»Јз Ғе®һзҺ°пјҢеҢ…жӢ¬MPPTжҺ§еҲ¶з®—жі•е’ҢдҪҺйҖҡж»ӨжіўеҷЁ(LPF)з”ЁдәҺеҠҹзҺҮеҲҶй…Қзҡ„е…·дҪ“еҸӮж•°и®ҫзҪ®гҖӮжӯӨеӨ–пјҢиҝҳи®Ёи®әдәҶд»ҝзңҹиҝҮзЁӢдёӯйҒҮеҲ°зҡ„й—®йўҳеҸҠи§ЈеҶіж–№жЎҲпјҢеҰӮйҒҝе…Қзі»з»ҹйңҮиҚЎгҖҒдјҳеҢ–зӣҙжөҒжҜҚзәҝз”өеҺӢжҺ§еҲ¶зӯүгҖӮ йҖӮеҗҲдәәзҫӨпјҡд»ҺдәӢз”өеҠӣз”өеӯҗгҖҒж–°иғҪжәҗеҸ‘з”өгҖҒеҫ®з”өзҪ‘з ”з©¶зҡ„жҠҖжңҜдәәе‘ҳе’Ңз ”з©¶дәәе‘ҳпјҢе°Өе…¶йҖӮз”ЁдәҺжңүдёҖе®ҡSimulinkдҪҝз”Ёз»ҸйӘҢе’ҢMATLABзј–зЁӢеҹәзЎҖзҡ„дәәзҫӨгҖӮ дҪҝз”ЁеңәжҷҜеҸҠзӣ®ж Үпјҡв‘ зҗҶи§Је’ҢжҺҢжҸЎе…үеӮЁзӣҙжөҒеҫ®з”өзҪ‘зҡ„е·ҘдҪңеҺҹзҗҶпјӣв‘ЎеӯҰд№ еҰӮдҪ•дҪҝз”ЁSimulinkжҗӯе»әе®Ңж•ҙзҡ„е…үеӮЁе№¶зҪ‘зі»з»ҹд»ҝзңҹжЁЎеһӢпјӣв‘ўдјҳеҢ–MPPTжҺ§еҲ¶з®—жі•е’ҢеҠҹзҺҮеҲҶй…Қзӯ–з•ҘпјҢжҸҗй«ҳзі»з»ҹзҡ„зЁіе®ҡжҖ§е’Ңж•ҲзҺҮгҖӮ е…¶д»–иҜҙжҳҺпјҡж–Үз« ејәи°ғдәҶеҸӮж•°ж•ҙе®ҡзҡ„йҮҚиҰҒжҖ§пјҢ并еҲҶдә«дәҶи®ёеӨҡе®һз”Ёзҡ„з»ҸйӘҢе’ҢжҠҖжңҜз»ҶиҠӮпјҢеҜ№дәҺеёҢжңӣж·ұе…Ҙз ”з©¶е…үеӮЁзӣҙжөҒеҫ®з”өзҪ‘д»ҝзңҹзҡ„иҜ»иҖ…йқһеёёжңүд»·еҖјгҖӮ
stm32 PWMеӯҰд№ дё“йўҳйҷ„д»Јз Ғ
2898702486frft2d.m
еҢ…жӢ¬пјҡжәҗзЁӢеәҸе·ҘзЁӢж–Ү件гҖҒProteusд»ҝзңҹе·ҘзЁӢж–Ү件гҖҒй…ҚеҘ—жҠҖжңҜжүӢеҶҢзӯү 1гҖҒйҮҮз”Ё51/52еҚ•зүҮжңәдҪңдёәдё»жҺ§иҠҜзүҮпјӣ 2гҖҒйҮҮз”ЁжұҮзј–иҜӯиЁҖзј–зЁӢпјӣ 3гҖҒйҮҮз”Ё8дёӘDS18B20дј ж„ҹеҷЁжЈҖжөӢ8и·Ҝжё©еәҰпјӣ 4гҖҒйҮҮз”Ёж•°з Ғз®ЎеҫӘзҺҜжҳҫзӨәйҖҡйҒ“еҸ·еҸҠжё©еәҰеҖјпјӣ 5гҖҒйҮҮз”Ё74HC595й©ұеҠЁжҳҫзӨәпјӣ
еҶ…е®№жҰӮиҰҒпјҡжң¬ж–ҮиҜҰз»Ҷд»Ӣз»ҚдәҶеҰӮдҪ•дҪҝз”ЁMATLAB GUIжһ„е»әдёҖдёӘеҠҹиғҪдё°еҜҢзҡ„еӣҫеғҸеӨ„зҗҶе·Ҙе…·з®ұгҖӮиҜҘе·Ҙе…·з®ұж¶өзӣ–дәҶеӣҫеғҸзҡ„еҹәжң¬ж“ҚдҪңеҰӮзҒ°еәҰеҢ–гҖҒиҫ№зјҳжЈҖжөӢгҖҒзӣҙж–№еӣҫеқҮиЎЎеҢ–зӯүеҠҹиғҪпјҢ并жҸҗдҫӣдәҶе®һж—¶еҜ№жҜ”е’ҢеӨҡз§Қз®—жі•йҖүжӢ©гҖӮж–ҮдёӯдёҚд»…еұ•зӨәдәҶе…·дҪ“зҡ„д»Јз Ғе®һзҺ°пјҢиҝҳж·ұе…ҘжҺўи®ЁдәҶжҜҸз§Қз®—жі•иғҢеҗҺзҡ„еҺҹзҗҶе’ҢжҠҖжңҜз»ҶиҠӮгҖӮдҫӢеҰӮпјҢзҒ°еәҰеҢ–йҮҮз”ЁNTSCж ҮеҮҶжқғйҮҚиҝӣиЎҢRGBеҲ°зҒ°еәҰзҡ„иҪ¬жҚўпјҢиҫ№зјҳжЈҖжөӢдҪҝз”ЁSobelе’ҢCannyз®—еӯҗпјҢзӣҙж–№еӣҫеқҮиЎЎеҢ–еҲҷејәи°ғдәҶеңЁHSVз©әй—ҙеӨ„зҗҶVйҖҡйҒ“зҡ„йҮҚиҰҒжҖ§гҖӮжӯӨеӨ–пјҢдҪңиҖ…еҲҶдә«дәҶи®ёеӨҡе®һи·өз»ҸйӘҢпјҢеҢ…жӢ¬жҖ§иғҪдјҳеҢ–жҠҖе·§гҖҒејӮеёёеӨ„зҗҶд»ҘеҸҠдёҚеҗҢз®—жі•еңЁзү№е®ҡеңәжҷҜдёӢзҡ„иЎЁзҺ°гҖӮ йҖӮеҗҲдәәзҫӨпјҡе…·жңүдёҖе®ҡMATLABеҹәзЎҖзҡ„ејҖеҸ‘иҖ…гҖҒеӣҫеғҸеӨ„зҗҶйўҶеҹҹзҡ„з ”з©¶дәәе‘ҳеҸҠзҲұеҘҪиҖ…гҖӮ дҪҝз”ЁеңәжҷҜеҸҠзӣ®ж Үпјҡв‘ еӯҰд№ MATLAB GUIзј–зЁӢеҸҠе…¶еңЁеӣҫеғҸеӨ„зҗҶдёӯзҡ„еә”з”Ёпјӣв‘Ў жҺҢжҸЎеёёи§Ғзҡ„еӣҫеғҸеӨ„зҗҶз®—жі•еҸҠе…¶дјҳеҢ–ж–№жі•пјӣв‘ў жһ„е»әиҮӘе·ұзҡ„еӣҫеғҸеӨ„зҗҶе·Ҙе…·з®ұпјҢз”ЁдәҺз§‘з ”жҲ–е·ҘзЁӢйЎ№зӣ®гҖӮ е…¶д»–иҜҙжҳҺпјҡж–Үз« й…ҚжңүиҜҰз»Ҷзҡ„д»Јз ҒзӨәдҫӢе’ҢзҗҶи®әи§ЈйҮҠпјҢжңүеҠ©дәҺиҜ»иҖ…жӣҙеҘҪең°зҗҶи§Је’ҢжҺҢжҸЎзӣёе…ізҹҘиҜҶзӮ№гҖӮеҗҢж—¶пјҢж–ҮдёӯжҸҗеҲ°зҡ„дёҖдәӣдјҳеҢ–жҠҖе·§е’ҢжіЁж„ҸдәӢйЎ№еҜ№дәҺжҸҗй«ҳзЁӢеәҸжҖ§иғҪе’ҢзЁіе®ҡжҖ§йқһеёёжңүз”ЁгҖӮ
еҶ…е®№жҰӮиҰҒпјҡжң¬ж–ҮиҜҰз»Ҷд»Ӣз»ҚдәҶеҰӮдҪ•дҪҝз”ЁSimulinkжҗӯе»әBLDCж— еҲ·зӣҙжөҒз”өжңәзҡ„иҪ¬йҖҹз”өжөҒеҸҢй—ӯзҺҜжҺ§еҲ¶зі»з»ҹгҖӮйҰ–е…ҲпјҢж–Үз« и§ЈйҮҠдәҶз”өжөҒзҺҜе’ҢиҪ¬йҖҹзҺҜзҡ„и®ҫи®ЎиҰҒзӮ№пјҢеҢ…жӢ¬PIжҺ§еҲ¶еҷЁеҸӮж•°зҡ„йҖүжӢ©гҖҒз”өжөҒйҮҮж ·зҡ„йў‘зҺҮи®ҫзҪ®д»ҘеҸҠPWMз”ҹжҲҗжЁЎеқ—зҡ„й…ҚзҪ®гҖӮжҺҘзқҖпјҢдҪңиҖ…еҲҶдә«дәҶдёҖдәӣе®һз”Ёзҡ„д»ҝзңҹжҠҖе·§пјҢеҰӮдҪҝз”Ёз®ҖеҢ–зүҲеҚЎе°”жӣјж»Өжіўд»Јжӣҝдј з»ҹжөӢйҖҹеҸ‘з”өжңәгҖҒеҠ е…ҘPWMиҪҪжіўйў‘зҺҮзҡ„йҡҸжңәжҠ–еҠЁд»ҘеҮҸе°‘и°җжҢҜеҷӘеЈ°гҖҒд»ҘеҸҠй’ҲеҜ№еёёи§Ғй”ҷиҜҜзҡ„и§ЈеҶіж–№жЎҲгҖӮжӯӨеӨ–пјҢж–ҮдёӯиҝҳжҸҗдҫӣдәҶе…·дҪ“зҡ„MATLABд»Јз ҒзүҮж®өпјҢеё®еҠ©иҜ»иҖ…жӣҙеҘҪең°зҗҶи§Је’Ңе®һзҺ°еҗ„дёӘжЁЎеқ—зҡ„еҠҹиғҪгҖӮжңҖеҗҺпјҢж–Үз« ејәи°ғдәҶд»ҝзңҹиҝҮзЁӢдёӯйңҖиҰҒжіЁж„Ҹзҡ„е…ій”®зӮ№пјҢеҰӮеҸӮж•°ж•ҙе®ҡгҖҒж•…йҡңжіЁе…ҘжЁЎеқ—зҡ„еә”з”Ёе’Ңд»ҝзңҹеҠ йҖҹж–№жі•гҖӮ йҖӮеҗҲдәәзҫӨпјҡд»ҺдәӢз”өжңәжҺ§еҲ¶з ”究зҡ„жҠҖжңҜдәәе‘ҳгҖҒз”өж°”е·ҘзЁӢдё“дёҡзҡ„еӯҰз”ҹд»ҘеҸҠеҜ№BLDCз”өжңәд»ҝзңҹж„ҹе…ҙи¶Јзҡ„е·ҘзЁӢеёҲгҖӮ дҪҝз”ЁеңәжҷҜеҸҠзӣ®ж ҮпјҡйҖӮз”ЁдәҺйңҖиҰҒиҝӣиЎҢBLDCз”өжңәжҺ§еҲ¶з®—жі•ејҖеҸ‘е’ҢжөӢиҜ•зҡ„з ”з©¶йЎ№зӣ®пјҢж—ЁеңЁжҸҗй«ҳд»ҝзңҹж•ҲзҺҮ并确дҝқжңҖз»ҲжҺ§еҲ¶ж•Ҳжһңзҡ„зЁіе®ҡжҖ§гҖӮйҖҡиҝҮеӯҰд№ жң¬ж–ҮпјҢиҜ»иҖ…иғҪеӨҹжҺҢжҸЎеҸҢй—ӯзҺҜжҺ§еҲ¶зі»з»ҹзҡ„жҗӯе»әж–№жі•еҸҠе…¶дјҳеҢ–жҠҖе·§гҖӮ е…¶д»–иҜҙжҳҺпјҡж–ҮдёӯжҸҗдҫӣзҡ„д»Јз Ғе’ҢжҠҖе·§еқҮз»ҸиҝҮе®һйҷ…йӘҢиҜҒпјҢе…·жңүиҫғй«ҳзҡ„е®һз”ЁжҖ§гҖӮе»әи®®иҜ»иҖ…еңЁе®һи·өдёӯз»“еҗҲиҮӘиә«йңҖжұӮиҝӣиЎҢйҖӮеҪ“и°ғж•ҙгҖӮ
еҶ…е®№жҰӮиҰҒпјҡжң¬ж–ҮиҜҰз»Ҷд»Ӣз»ҚдәҶеҫ®з”өзҪ‘并зҰ»зҪ‘дёӢеһӮжҺ§еҲ¶SimulinkжЁЎеһӢзҡ„и®ҫи®ЎдёҺе®һзҺ°пјҢзү№еҲ«й’ҲеҜ№MATLAB 2018зүҲжң¬гҖӮжЁЎеһӢж¶өзӣ–еҲҶеёғејҸз”өжәҗгҖҒиҙҹиҚ·гҖҒеӮЁиғҪиЈ…зҪ®еҸҠжҺ§еҲ¶жЁЎеқ—пјҢйҖҡиҝҮдёӢеһӮжҺ§еҲ¶е®һзҺ°еҫ®з”өзҪ‘еңЁе№¶зҪ‘е’ҢзҰ»зҪ‘жЁЎејҸй—ҙзҡ„е№ізЁіеҲҮжҚўдёҺзЁіе®ҡиҝҗиЎҢгҖӮж–ҮдёӯжҸҗдҫӣдәҶиҜҰз»Ҷзҡ„д»Јз ҒзӨәдҫӢпјҢи§ЈйҮҠдәҶдёӢеһӮжҺ§еҲ¶зҡ„е…ій”®еҸӮж•°и®ҫе®ҡеҸҠе…¶еҜ№зі»з»ҹзЁіе®ҡжҖ§зҡ„еҪұе“ҚгҖӮжӯӨеӨ–пјҢиҝҳи®Ёи®әдәҶ并зҰ»зҪ‘еҲҮжҚўйҖ»иҫ‘гҖҒй”ҒзӣёзҺҜи®ҫи®ЎгҖҒж»ӨжіўеҷЁеҸӮж•°йҖүжӢ©зӯүй—®йўҳпјҢ并з»ҷеҮәдәҶд»ҝзңҹжҠҖе·§е’ҢжҖ§иғҪиҜ„дј°ж–№жі•гҖӮ йҖӮеҗҲдәәзҫӨпјҡд»ҺдәӢз”өеҠӣзі»з»ҹз ”з©¶гҖҒеҫ®з”өзҪ‘жҺ§еҲ¶жҠҖжңҜз ”еҸ‘зҡ„дё“дёҡдәәеЈ«е’ҢжҠҖжңҜзҲұеҘҪиҖ…гҖӮ дҪҝз”ЁеңәжҷҜеҸҠзӣ®ж Үпјҡв‘ з ”з©¶еҫ®з”өзҪ‘并зҰ»зҪ‘жҺ§еҲ¶зӯ–з•Ҙпјӣв‘ЎйӘҢиҜҒдёӢеһӮжҺ§еҲ¶з®—жі•зҡ„жңүж•ҲжҖ§пјӣв‘ўдјҳеҢ–еҫ®з”өзҪ‘зі»з»ҹзҡ„еҠЁжҖҒе“Қеә”е’ҢзЁіе®ҡжҖ§пјӣв‘ЈжөӢиҜ•дёҚеҗҢе·ҘеҶөдёӢзҡ„зі»з»ҹжҖ§иғҪгҖӮ е…¶д»–иҜҙжҳҺпјҡиҜҘжЁЎеһӢеңЁMATLAB 2018дёӯиЎЁзҺ°еҮәиүІпјҢиғҪеӨҹдҪңдёәеҸҜйқ зҡ„з ”з©¶е·Ҙе…·пјҢеё®еҠ©з ”究дәәе‘ҳж·ұе…ҘдәҶ解并зҰ»зҪ‘дёӢеһӮжҺ§еҲ¶зҡ„еҺҹзҗҶдёҺеә”з”ЁгҖӮ