
第一部分、创建数据库和表
在管理MySQL数据库的图形化工具中,最为熟知的就是phpMyAdmin和Mysql-Front了,今天跟大家分享另外一个管理mysql数据库的另外一个利器---Navicat MySQL。
Navicat MySQL可以与任何3.21或以上版本的MySQL一起工作,并支持大部分的MySQL最新功能,包括触发器、存储过程、函数、事件、视图、管理用户, 不管是对于专业的数据库开发人员还是DB新手来说,其精心设计的用户图形界面(GUI)都为我们安全、便捷的操作MySQL数据信息提供了一个简洁的管理 平台。不但可以为window平台稳定运行,同样兼容于Mac OS X 和Linux系统。其官方提供简体中文版供大家下载试用(for 30days),
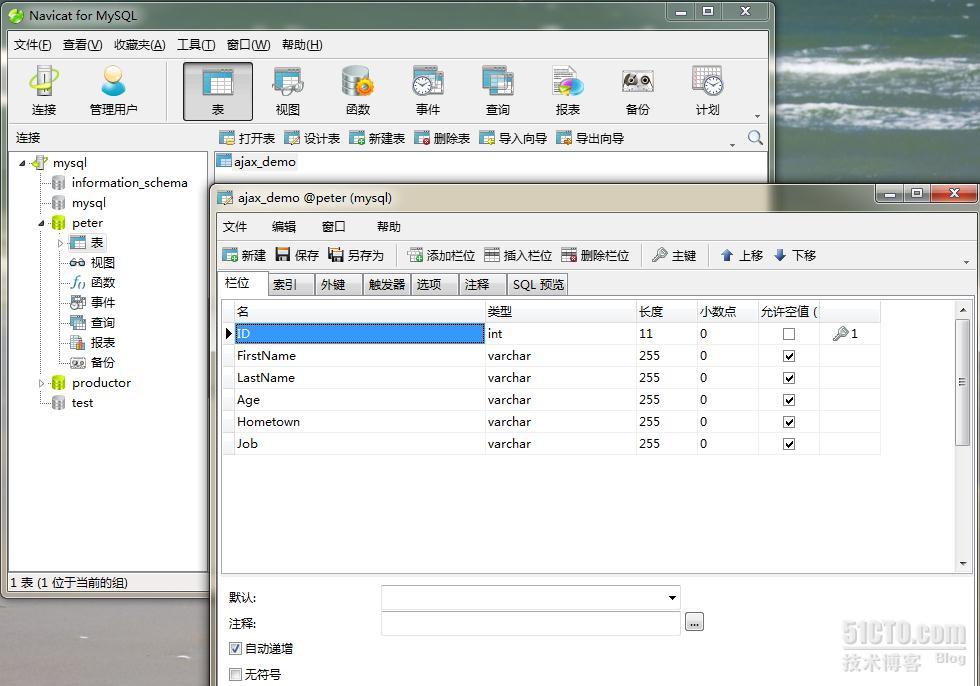
图: 1
一:下载与安装
此处省略安装步骤若干
二:创建连接数据库
1. 【连接数据库】安装完成后启动Navicat,在导航窗口的左上角有一个【连接】的按钮,点击后会弹出一个连接属性的提示框,首先给【连接】起一个合适的名字然后输入正确的连接信息,如果是要管理远程的数据库,在IP地址栏内输入正确的IP地址即可。
Navicat同样支持SSL或SSH连接,在本例中我以最简单的常规连接即管理本地数据库为例跟大家做演示。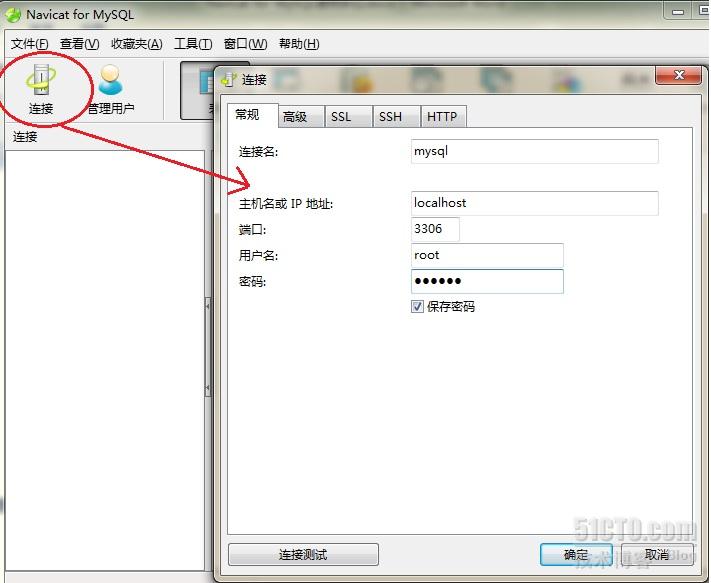
图: 2
连接成功后,在左侧的导航窗口后会看到本机所有的MySQL数据库,其中灰色的表示没有打开数据库,绿色的标识的就是已经被打开的数据库。
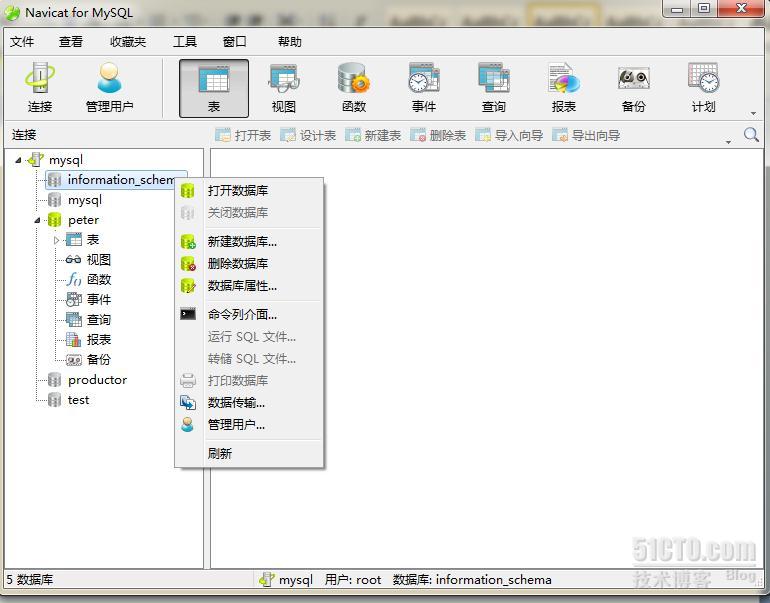
图: 3
右键点击一个灰色的数据库,在右键菜单中包含打开、关闭、新建、删除和数据传输、管理用户等命令。
2. 【管理用户】
为了保证数据库的安全,对操作用户分级授权是非常有必要的,Navicat给我们提供了一个非常强悍又非常便捷的用户管理工具。在图1中我们选择位于【连接】右边的【管理用户】命令后弹出管理用户的界面,系统默认的只有一个拥有所有权限的root用户,
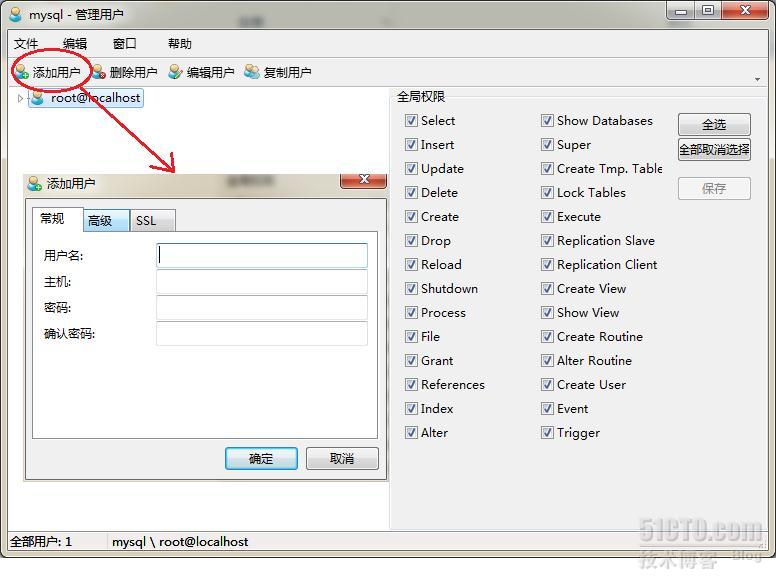
图: 4
选择【添加用户】选项,在提示窗口中输入用户名及相关信息后添加,新添加的用户是没有任何操作权限的。我们可以根据业务要求对其适当的授权,比如只能执行查看(select)命令。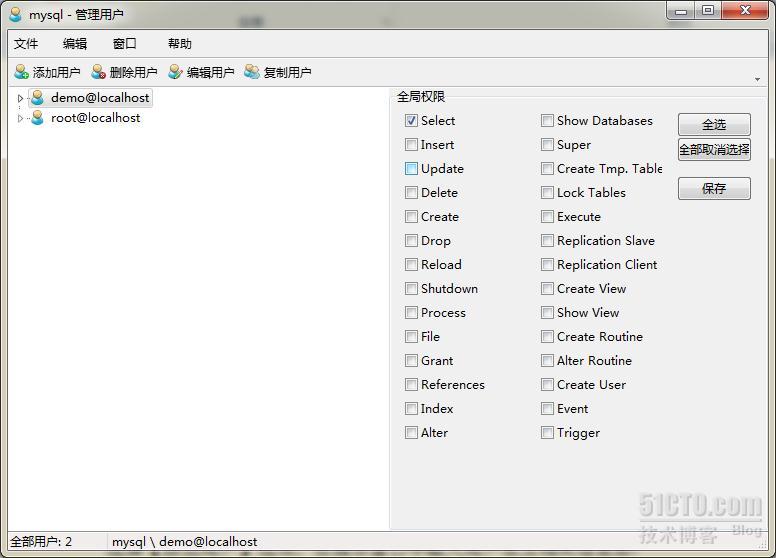
图: 5
三:新建数据库和表
新建数据库比较简单,在Navicat导航视图(如图1)的左边连接导航栏中的空白区域点击右键就可以看到【新建数据库】的命令,这个very easy,我来建一个管理学生的数据库:school.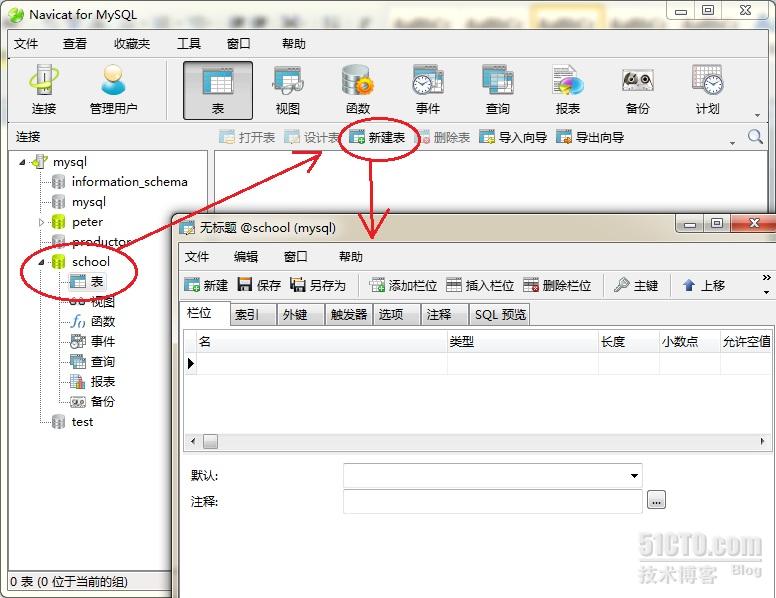
图: 6
建库完毕后接下来的要做的当然是建学生表:students(如图7),
图: 7
在建表过程中有一个地方要特别的注意,就是“栏位”,对于初次使用Navicat的新手来说,这个比较陌生,它的意思就是我们通常所说的“字段”,工具栏中的“添加栏位”即添加字段的意思,不要弄混了就成,添加完所有的字段以后要根据需求设置相应的“主键”。
如果数据库比较复杂我们还可以根据需求继续做相关的设置,在“栏位”标签栏中还有索引、外键、触发器供我们调用,在“SQL预览”标签下是SQL语句,这对于我们学习SQL语句来说可是非常有用的。
【说明:】笔者对于数据库开发知之甚少,所以对于函数、事件、报表等进阶应用的技能不能全部演示出来供大家学习参考。
第二部分、导入/导出数据表
四:管理和维护数据表和数据库
1. 当我们设计完表以后,肯能投入最多时间的就是优化和维护了Navicat同样给我们提供了一个【维护表】的便捷工具,右键选择表students,在右键菜单靠下的位置有个一个【维护表】的选项,其选项下包括分析表、检查表、优化表、修发表4个命令供我们使用。

图: 8
2. 导出数据表
与phpMyAdmin和Mysql-Front相比,Navicat所导出数 据表的格式更多,同时增加了对Excel2007以上版本的支持,当设计完一个表后,如果有上百条或更多的原始数据需要导入MySQL数据库时我们就可以 先把设计好的数据导出到一个Excel表中,然后按照格式去填充数据,最后把这些填充完的数据再导入到MySQL数据库中,首先我们看如何使用 Navicat导出数据,共分5个步骤。
步骤1:点击【导出向导】命令在步骤1中选择表类型:Excel文件
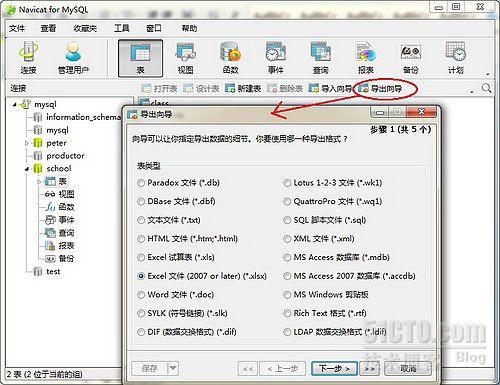
图: 9
步骤2:选择导出表的存放位置
将导出的Excel表存放到合适的位置,如“我的文档”
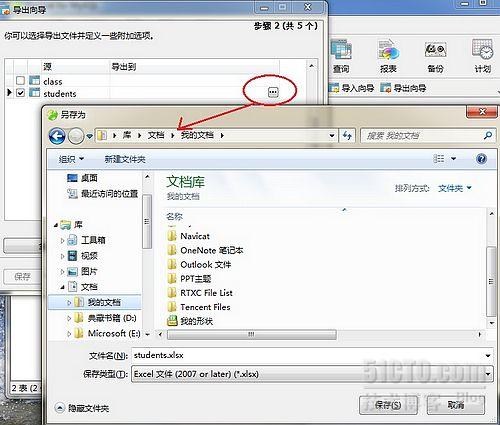
图: 10
步骤3:选择导出的需要导出的栏位(列),默认选中全部栏位
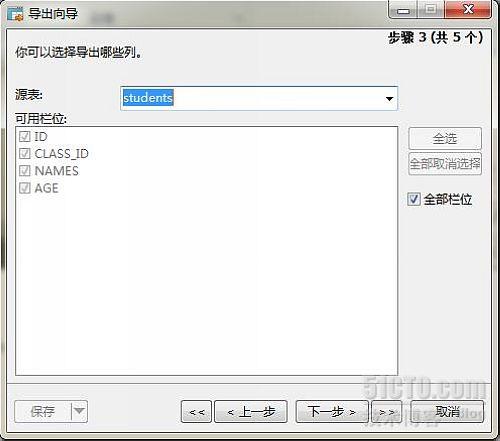
图: 11
步骤4:定义附加选项
建议一定要勾选上“包含列的标题”一项,这样在导出的Excel表的数据看起来比较完整。
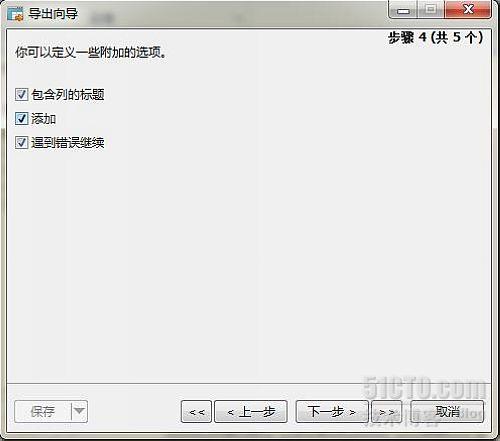
图: 12
步骤5:完成导出
完成上面的各项设置后,我们点击【开始】按钮执行导出,导出完成后,在[Msg]消息窗中所导出表的类别、位置等信息提示。
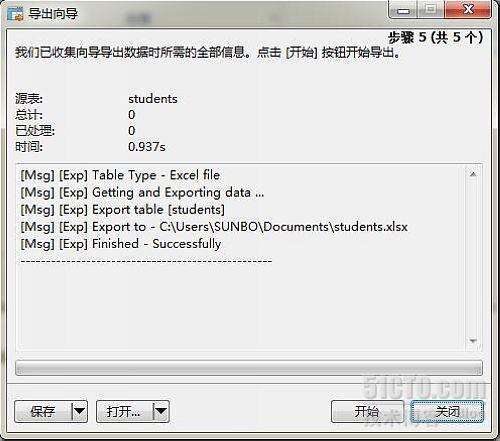
图: 13
我们看一下导出的Excel表的内容,,因为在前文的设计表的示例中没有输入数据,所以这里导出的Excel是一个空表,接下来我们手工录入一些数据后演示导入数据表的操作

图: 14
3. 导入数据表
在图14中所示的Excel表中我手动录入了一些数据,现在我把这个表导入到数据库中,导入数据表共有8个步骤,我们一一演示出来
步骤1:运行【导入向导】,选择导入数据的类型
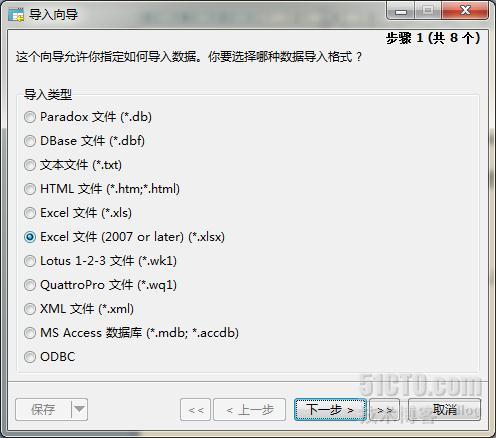
图: 15
步骤2:选择文件数据源
图: 16
步骤3:未知,系统过了步骤2直接进入步骤4,不知道这是不是一个系统的bug,为了和提示框同步,此处省略。
步骤4:给源文件定义一些附加选项
在下图中红色方框内的选项一定要选择正确,否则将不能完成正确的导入。
[栏位名行]:数据表字段所在的行位置(参见图14),这里输入1;
[第一个数据行]:所导入源数据从第几行开始的,我这里输入的是2(参见图14);
[最后一个数据行]:所导入源数据到第几行结束,我这里输入的是6(参见图14)
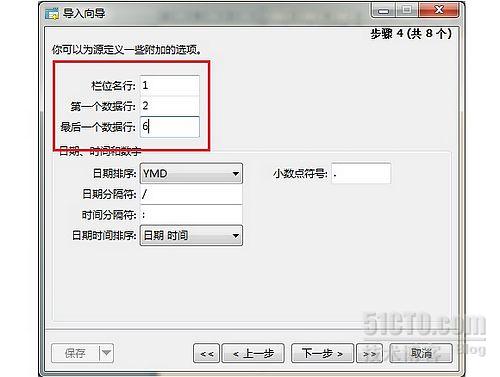
图: 17
步骤5:选择目标表,也可以新建一个表
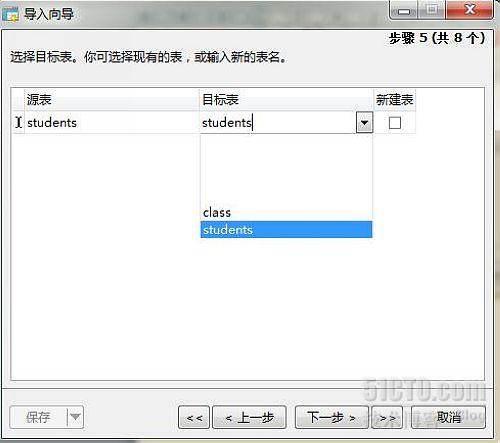
图: 18
步骤6:定义源栏位和目标栏位的对应关系,如果目标栏位设置了主键,在这一步中一定要勾选,否则也将无法正常导入数据
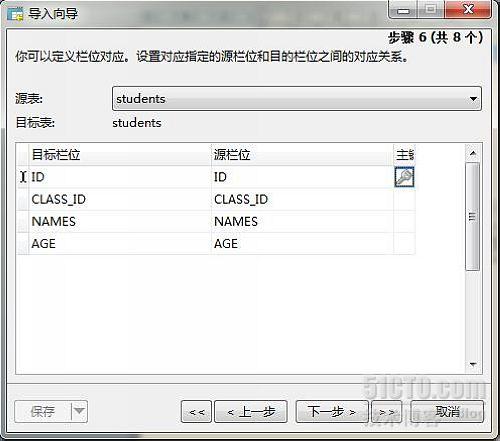
图: 19
步骤7:选择导入模式
如果是新表的话呢,我们选择第一项:添加,根据具体情况我们可以选择不同的选项,有兴趣的朋友可以每个都测试一下什么效果
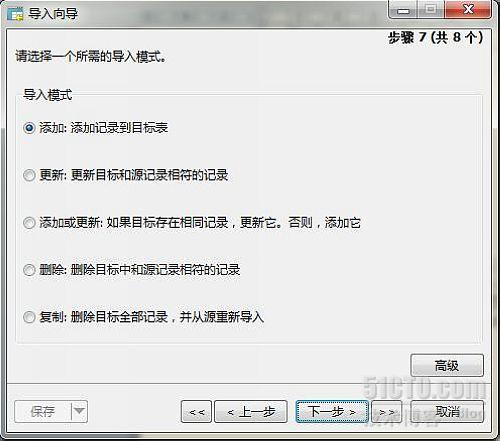
图: 20
步骤8:点击【开始】按钮执行导入命令,导入完成后还会有一个[Msg]的消息提示
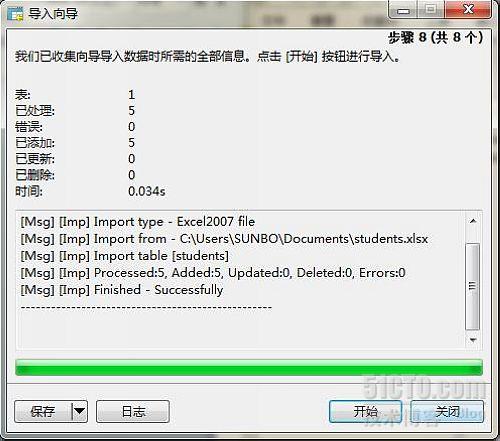
图: 21
执行完后,我们到数据库中去验证一下:

图: 22
在图22中我们可以清晰的看到所有添加进来的数据,在这个窗口的左下角有一排小按钮值得注意,其中的“+”和“-”就是插入和删除一条记录的按钮,如果要添加一条记录的话可以将光标停留在最后一行的最后一个值上,然后按“Tab”键即可依次往下添加数据。
第三部分、实现自动备份数据库
五、备份和还原MySQL数据库
在数据库的管理中,备份和还原是必须做认真做的事情,如果疏忽或者做粗糙了,那么一旦数据库故障后果不堪设想,所以Navicat同样也有备份和还原的功能,相比较创建功能,其备份功能则非常的简单。
1、备份数据库
在主视图窗口中选择【备份】功能按钮后,在下面的导航栏中点击【新建备份】弹出其提示窗口,在提示窗口中点击【开始】按钮执行备份命令。
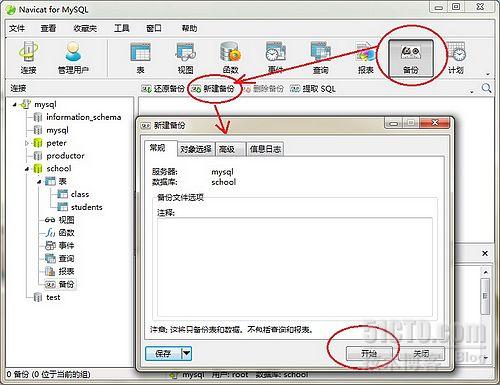
图: 23
执行完备份命令后,在导航栏中可以看到备份的相关信息。
在备份时间上点击右键,选中【常规】命令即可查看备份文件的存储位置、文件大小和创建时间。
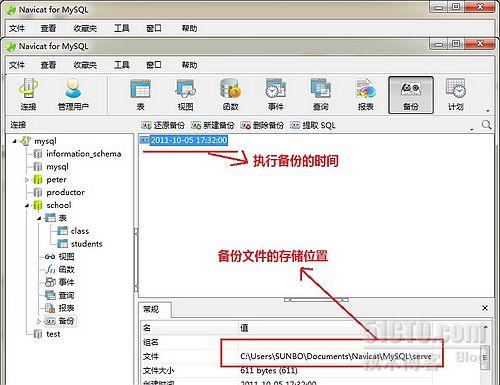
图: 24
2、还原数据库
执行图24所示视图中的【还原备份】命令,在弹出的窗口中点击【开始】按钮,对于警告的提示我们当然选择确定按钮了。

图: 25
执行完还原命令后,依然会有一个友好的消息提示。

图: 26
3、创建备份计划
手动备份数据库操作起来固然很便捷,但能不能创建定时备份呢?这是完全可以的,Navicat同样可以做到。
步骤1:设置计划批处理作业
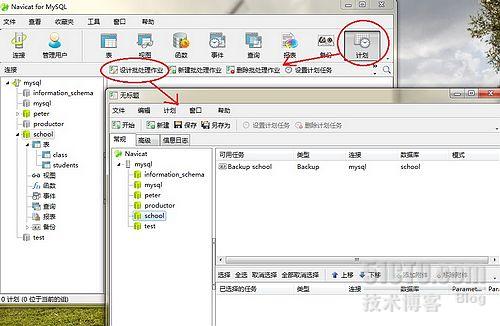
图: 27
在左边的【常规】导航栏中选择所要备份的数据库,然后点击【保存】按钮,起一个好听的名字,如back。保存此批处理作业后,方可对其设置计划任务。
步骤2:设置计划任务
在批处理作业的视图窗口中,点击【设置计划任务】选项按钮后会弹出一个对话框,我们需要计划的时间设置都在这个视图中完成。点击【新建】按钮新建一个计划,在【计划任务】的下拉列表中选择计划的执行周期:每天/每周/每月等,

图: 28
下面是以每周为例截图说明:
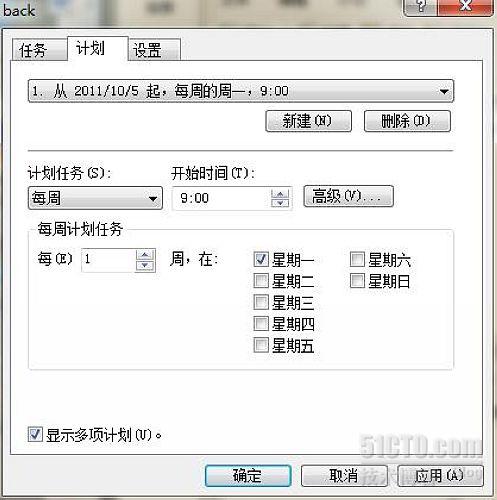
图: 29
设置完计划执行时间后,点击【应用】或【确定】按钮。
只要我们做好数据库的备份管理工作,就不用怕数据库故障,当然就算备份工作做到了万无一失,我们也不希望数据库出问题。



相关推荐
ABB常用机器人技术参数.pdf
内容概要:本文详细介绍了如何利用西门子1200 PLC及其FB284功能块实现对3台V90伺服电机、相机角度调整以及FANUC机器人的控制。主要内容涵盖FB284功能块的基础参数设置、多台伺服电机的具体控制方法、相机角度调整的实现、DP通讯配置FANUC机器人控制,以及PLC程序注解和触摸屏程序的设计。通过具体代码示例和实际操作步骤,帮助读者理解和掌握这一系列控制技术。 适合人群:具备一定PLC基础知识的工控初学者和技术人员。 使用场景及目标:① 学习并掌握FB284功能块的使用方法;② 实现多台V90伺服电机的协同控制;③ 掌握相机角度调整的技术细节;④ 完成FANUC机器人通过DP通讯的控制配置;⑤ 提高PLC程序的可读性和易维护性。 其他说明:文中提供了丰富的代码片段和配置示例,便于读者实践操作。此外,还分享了一些实际项目中的经验和技巧,有助于提高项目的稳定性和效率。
《计算机常用工具软件(第3版)》第6章--图形图像工具.ppt
内容概要:本文由《未来产业新赛道研究报告》整理而成,涵盖了未来产业在全球范围内的发展态势和竞争形势。报告指出,引领型国家通过全方位体制机制创新,在先进制造、人工智能、量子科技、新一代通信等领域建立了全面领先优势。文中引用了麦肯锡和GVR的数据,预测了人工智能和人形机器人等未来产业的巨大经济潜力。报告还详细介绍了国外和国内对未来产业赛道的重点布局,如量子科技、人工智能、先进网络和通信技术、氢能与储能、生物技术等。此外,报告列举了中国重点省市如北京、上海等的具体发展方向,以及知名研究机构对未来产业热点的分析。最后,报告提出了构建我国未来产业重点赛道目录的建议,包括通用人工智能、高级别自动驾驶、商业航天、人形机器人、新型储能、低空经济、清洁氢、算力芯片、细胞与基因治疗和元宇宙等十大重点赛道。 适用人群:对科技趋势和未来产业发展感兴趣的政策制定者、投资者、企业家和研究人员。 使用场景及目标:①帮助政策制定者了解全球未来产业发展动态,为政策制定提供参考;②为企业提供未来产业布局的方向和重点领域;③为投资者提供投资决策依据,识别未来的投资机会;④为研究人员提供未来科技发展趋势的全景图。 其他说明:报告强调了未来产业在全球经济中的重要性,指出了中国在未来产业布局中的战略定位和发展路径。同时,报告呼吁加强国家顶层设计和行业系统谋划,探索建立未来产业技术预见机制,深化央地联动,推动未来产业高质量发展。
《网络设备安装与调试(神码版)》2交换机的配置.pptx
内容概要:本文详细介绍了自动驾驶路径规划中Lattice算法的基础部分,主要包括三个关键概念和技术实现:参考线生成、Frenet坐标系转换和五次多项式拟合。首先解释了参考线的作用及其生成方法,如三次样条插值和平滑曲线生成。其次探讨了Frenet坐标系的优势,展示了如何将笛卡尔坐标系下的车辆位置投影到参考线上,从而简化路径规划问题。最后讨论了五次多项式的应用,强调其能够确保轨迹的光滑性和舒适性,并提供了详细的Matlab和C++代码实现。 适合人群:对自动驾驶技术感兴趣的开发者、研究人员以及有一定编程基础并希望深入了解路径规划算法的人群。 使用场景及目标:适用于研究和开发自动驾驶系统,特别是进行路径规划模块的设计与实现。主要目标是帮助读者掌握Lattice规划的基本原理和技术细节,以便应用于实际工程项目中。 其他说明:文中不仅有理论讲解,还附带了大量的代码实例,便于读者理解和实践。此外,作者提醒了一些常见的陷阱和注意事项,如避免过拟合、选择合适的插值算法等。
《网络操作系统(Linux)》项目4-磁盘管理.pptx
《计算机应用基础实训指导》实训十八-PowerPoint-2010的动画和切换.pptx
安川机器人DX100使用说明书.1.pdf
《计算机专业英语》Unit-3-What-is-Hardware.ppt
内容概要:本文详细介绍了汇川H5U-A16自动贴布网胶机的PLC控制系统及其与威纶通触摸屏的集成方法。主要内容涵盖伺服轴控制、气缸动作、矩阵托盘管理、OEE统计等方面的编程技巧和优化措施。文中展示了如何将复杂的硬件动作抽象为可复用的功能块(FB),并通过参数配置实现灵活的系统控制。此外,还讨论了如何利用威纶通触摸屏进行实时监控和数据分析,以及如何通过合理的IO表管理和注释提高系统的可维护性和扩展性。 适合人群:从事工业自动化领域的工程师和技术人员,尤其是熟悉PLC编程和触摸屏应用的专业人士。 使用场景及目标:适用于需要开发或优化自动贴布网胶机及其他类似自动化设备的企业。主要目标是提升设备的可靠性和效率,降低维护成本,缩短开发周期。 其他说明:本文不仅提供了具体的编程示例,还分享了许多实战经验和技巧,如如何避免常见的错误和陷阱,如何应对特定硬件特性的挑战等。这些内容对于理解和掌握工业自动化系统的开发非常有价值。
内容概要:本文详细介绍了利用Matlab和Simulink进行电力系统暂态稳定性分析的方法和技术。首先构建了一个单机无穷大系统的仿真模型,涵盖了同步电机、无穷大电网、输电线路等基础模块的搭建。接着深入探讨了不同类型故障(如短路、断线)的配置方法及其对系统稳定性的影响。针对常见的暂态问题,提出了多种解决方案,包括并联补偿器的应用、自动重合闸的设计以及仿真加速技巧。同时,通过具体案例展示了如何调整关键参数来优化系统性能,确保暂态过程中系统的稳定性和可靠性。 适合人群:从事电力系统研究与开发的技术人员,尤其是对电力系统暂态稳定性感兴趣的工程师和研究人员。 使用场景及目标:适用于需要评估电力系统在突发故障情况下的稳定性的场合,帮助用户掌握故障仿真技术,优化系统设计,提高电力系统的可靠性和安全性。 其他说明:文中提供的代码片段和仿真技巧均经过实际验证,能够显著提升仿真的效率和准确性。建议读者结合自己的项目需求灵活应用相关技术和方法。
内容概要:本文详细介绍了利用FPGA实现永磁同步电机(SPM)的SVPWM控制系统的具体实现方法。系统采用Verilog进行底层硬件时序控制,包括SVPWM模块中的扇区判断、PWM生成以及死区时间控制等;Nios2软核处理器则用于执行控制算法,如磁场定向控制(FOC)、Clarke变换和PID调节器。两者通过Avalon总线连接,实现高效的软硬件协同工作。此外,文中还讨论了一些常见的调试技巧和优化方法,如定点数运算、硬件CRC校验模块的应用等。 适合人群:具备一定FPGA开发经验和电机控制理论基础的技术人员,尤其是从事嵌入式系统开发、自动化控制领域的工程师。 使用场景及目标:适用于需要高精度、高性能电机控制的应用场合,如工业自动化设备、机器人关节控制等。目标是通过软硬件协同设计提高系统的实时性和可靠性,降低电流谐波失真,增强抗干扰能力。 其他说明:文中提供了完整的工程源码和技术细节,有助于读者深入理解和实践。同时,作者分享了许多实用的经验教训,帮助读者避开常见陷阱,提高开发效率。
《移动商务网页设计与制作》第11章--Web-Worker-处理线程.ppt
chromedriver-win64-135.0.7049.114.zip
《计算机系统维护》第14章--硬盘分区的调整.ppt
内容概要:本文深入研究了交错并联Buck变换器的工作原理、性能优势及其具体实现。文章首先介绍了交错并联Buck变换器相较于传统Buck变换器的优势,包括减小输出电流和电压纹波、降低开关管和二极管的电流应力、减小输出滤波电容容量等。接着,文章详细展示了如何通过MATLAB/Simulink建立该变换器的仿真模型,包括参数设置、电路元件添加、PWM信号生成及连接、电压电流测量模块的添加等。此外,还探讨了PID控制器的设计与实现,通过理论分析和仿真验证了其有效性。最后,文章通过多个仿真实验验证了交错并联Buck变换器在纹波性能、器件应力等方面的优势,并分析了不同控制策略的效果,如P、PI、PID控制等。 适合人群:具备一定电力电子基础,对DC-DC变换器特别是交错并联Buck变换器感兴趣的工程师和技术人员。 使用场景及目标:①理解交错并联Buck变换器的工作原理及其相对于传统Buck变换器的优势;②掌握使用MATLAB/Simulink搭建交错并联Buck变换器仿真模型的方法;③学习PID控制器的设计与实现,了解其在电源系统中的应用;④通过仿真实验验证交错并联Buck变换器的性能,评估不同控制策略的效果。 其他说明:本文不仅提供了详细的理论分析,还给出了大量可运行的MATLAB代码,帮助读者更好地理解和实践交错并联Buck变换器的设计与实现。同时,通过对不同控制策略的对比分析,为实际工程应用提供了有价值的参考。
包括:源程序工程文件、Proteus仿真工程文件、电路原理图文件、配套技术手册 1、采用51/52单片机(通用)作为主控芯片; 2、数码管前两位显示分钟,后两位显示秒; 3、可以切换正计时/倒计时; 4、可设置倒计时时间,倒计时结束蜂鸣器报警; 5、计时过程中可记录时刻点 (存储十组记录数据),可翻看记录的数据。
《计算机应用基础实训指导》实训一-文字录入.pptx
《计算机录入技术》第十八章-常用外文输入法.pptx