
HT for Web作为逻辑拓扑图形组件自身没有GIS功能,但可以与各种GIS引擎即其客户端组件进行融合,各取所长实现逻辑拓扑和物理拓扑的无缝融合,本章将具体介绍HT for Web与开发免费的OpenLayers地图结合应用的关键技术点,该文介绍的结合的原理,其实还可推广到与ArcGIS、百度地图以及GoogleMap等众多GIS地图引擎融合的解决方案。
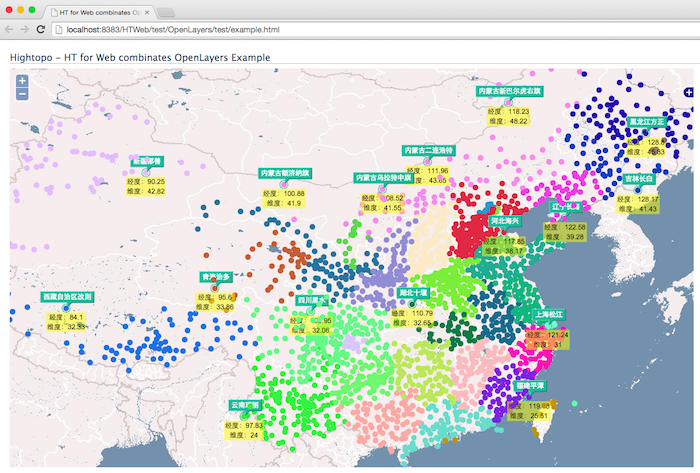
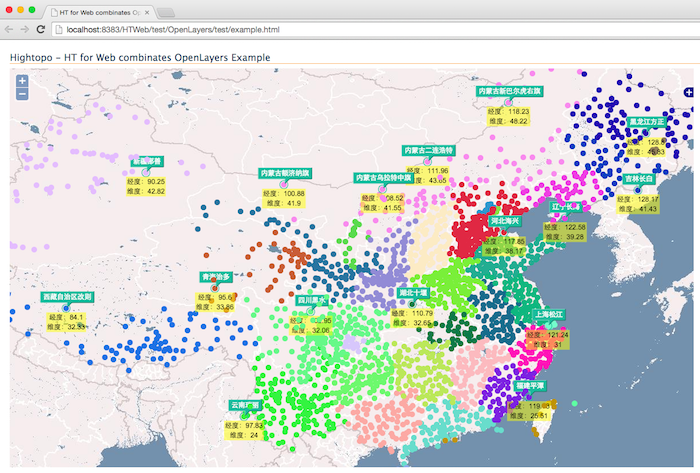
以上抓图为本文介绍的例子最终运行效果,接下来我们一步步来实现,首选显示地图信息需要有城市经纬度数据,搜索了下感谢此篇博客提供的数据。这么大量的数据我采用的是《HT图形组件设计之道(四)》中介绍的getRawText函数方式,有了数据之后剩下就是呈现的问题了,我们需要将HT的GraphView组件与OpenLayers的map地图组件叠加在一起,也就是OpenLayers的tile地图图片在下方,GraphView的组件在上方,由于GraphView默认是透明的,因此非图元部分用户可穿透看到地图内容。找到合适的组件插入位置是头疼的事情,ArcGIS、百度地图包括GoogleMap几乎每个不同的GIS组件都需要尝试一番才能找到合适的插入位置,其他GIS引擎组件的整合以后章节再介绍,本文我们关注的OpenLayers的插入方式为map.viewPortDiv.appendChild(graphView.getView())。
HT和OpenLayers组件叠加在一起之后,剩下就是拓扑里面图元的摆放位置与经纬度结合的问题,常规网络拓扑图中存储在ht.Node图元的position是逻辑位置,和经纬度没有任何关系,因此在GIS应用中我们需要根据图元的经纬度信息换算出position的屏幕逻辑坐标信息,如果你知道投影算法也可以自己提供函数处理,但所有GIS组件都提供了类似的API函数供调用,当然这部分也没有标准化,不同的GIS组件需要调用的API都有差异,但基本原理是一致的,对于OpenLayers我们通过map.getPixelFromLonLat(data.lonLat)可以将经纬度信息转换成屏幕像素逻辑坐标,也就是ht.Node需要的position坐标信息。
细心的同学会想到转换是双向的,有可能用户需要拖动图元节点改变其经纬度信息,这时候我们就需要另外一个方向函数,即根据屏幕逻辑坐标转换成当前坐标对应的经纬度,在OpenLayers中我们通过map.getLonLatFromPixel(new OpenLayers.Pixel(x, y));可以搞定。
显示搞定后剩下就是交互的问题了,HT自己有套交互体系,OpenLayers也需要地图漫游和缩放的交互,两者如何结合呢?如果能保留住两者的功能那就最好了,答案时肯定的,我们只需要添加mousedown或touchstart事件监听,如果graphView.getDataAt(e)选中了图元我们就通过e.stopPropagation();停止事件的传播,这样map地图就不会响应,这时候HT接管了交互,如果没有选中图元则map接管地图操作的交互。
以上交互设计似乎很完美了,结果运行时发现了几处折腾了我很久才找到解决方案的坑:
- 设置map.events.fallThrough = true;否则map不会将事件透传到HT的GraphView组件
- graphView.getView().style.zIndex = 999; 需要指定一定的zIndex否则会被遮挡
- graphView.getView().className = ‘olScrollable’; 否则滚轮不会响应地图缩放
- 设置ht.Default.baseZIndex: 1000 否则ToolTip会被遮挡
为了让这个例子用户体验更友好,我还用心折腾了些技术点供参考:
- 采用开源免费的http://llllll.li/randomColor/随机颜色类库,该类库还有很多非常棒的颜色获取函数,我只是简单的为每个省份显示不一样的颜色
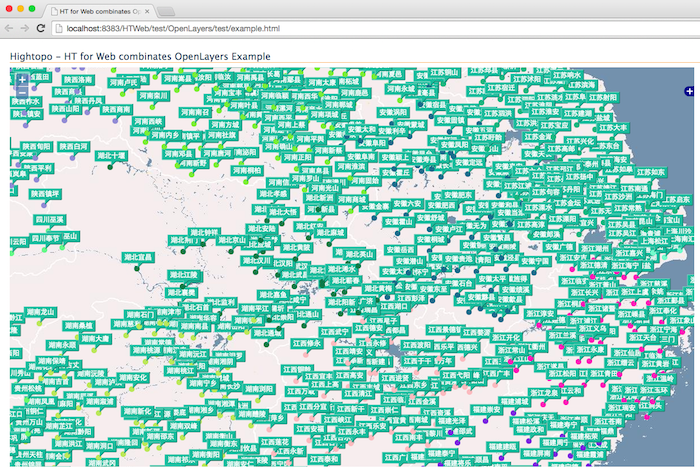
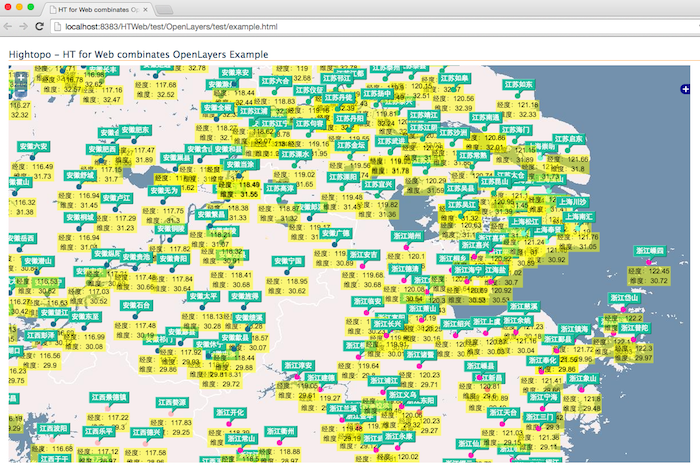
- 重载了isVisible、isNoteVisible和isLabelVisible仅在缩放达到一定级别才显示更详细的内容,否则缩小时所有城市信息都显示完全无法查看,多少也能提高显示性能
以下为最终效果的抓图、视频和源代码:http://i.youku.com/u/UMTQxNDQ2NjQ0MA==
function init(){
graphView = new ht.graph.GraphView();
var view = graphView.getView();
map = new OpenLayers.Map("map");
var ol_wms = new OpenLayers.Layer.WMS(
"OpenLayers WMS",
"http://vmap0.tiles.osgeo.org/wms/vmap0",
{layers: "basic"}
);
map.addLayers([ol_wms]);
map.addControl(new OpenLayers.Control.LayerSwitcher());
map.zoomToMaxExtent();
map.events.fallThrough = true;
map.zoomToProxy = map.zoomTo;
map.zoomTo = function (zoom,xy){
view.style.opacity = 0;
map.zoomToProxy(zoom, xy);
console.log(zoom);
};
map.events.register("movestart", this, function() {
});
map.events.register("move", this, function() {
});
map.events.register("moveend", this, function() {
view.style.opacity = 1;
reset();
});
graphView.getView().className = 'olScrollable';
graphView.setScrollBarVisible(false);
graphView.setAutoScrollZone(-1);
graphView.handleScroll = function(){};
graphView.handlePinch = function(){};
graphView.mi(function(e){
if(e.kind === 'endMove'){
graphView.sm().each(function(data){
if(data instanceof ht.Node){
var position = data.getPosition(),
x = position.x + graphView.tx(),
y = position.y + graphView.ty();
data.lonLat = map.getLonLatFromPixel(new OpenLayers.Pixel(x, y));
}
});
}
});
graphView.enableToolTip();
graphView.getToolTip = function(event){
var data = this.getDataAt(event);
if(data){
return '城市:' + data.s('note') + '
经度:' + data.lonLat.lon + '
维度:' + data.lonLat.lat;
}
return null;
};
graphView.isVisible = function(data){
return map.zoom > 1 || this.isSelected(data);
};
graphView.isNoteVisible = function(data){
return map.zoom > 6 || this.isSelected(data);
};
graphView.getLabel = function(data){
return '经度:' + data.lonLat.lon + '\n维度:' + data.lonLat.lat;
};
graphView.isLabelVisible = function(data){
return map.zoom > 7 || this.isSelected(data);
};
view.addEventListener("ontouchend" in document ? 'touchstart' : 'mousedown', function(e){
var data = graphView.getDataAt(e);
if(data || e.metaKey || e.ctrlKey){
e.stopPropagation();
}
}, false);
view.style.position = 'absolute';
view.style.top = '0';
view.style.left = '0';
view.style.right = '0';
view.style.bottom = '0';
view.style.zIndex = 999;
map.viewPortDiv.appendChild(view);
var color = randomColor();
lines = china.split('\n');
for(var i=0; i<lines.length; i++) {
line = lines[i].trim();
if(line.indexOf('【') === 0){
//province = line.substring(1, line.length-1);
color = randomColor();
}else{
var ss = line.split(' ');
if(ss.length === 3){
createNode(parseFloat(ss[1].substr(3)), parseFloat(ss[2].substr(3)), ss[0].substr(3), color);
}
}
}
}
function reset(){
graphView.tx(0);
graphView.ty(0);
graphView.dm().each(function(data){
if(data.lonLat){
data.setPosition(map.getPixelFromLonLat(data.lonLat));
}
});
graphView.validate();
}
function createNode(lon, lat, name, color){
var node = new ht.Node();
node.s({
'shape': 'circle',
'shape.background': color,
'note': name,
'label.background': 'rgba(255, 255, 0, 0.5)',
'select.type': 'circle'
});
node.setSize(10, 10);
var lonLat = new OpenLayers.LonLat(lon, lat);
lonLat.transform('EPSG:4326', map.getProjectionObject());
node.setPosition(map.getPixelFromLonLat(lonLat));
node.lonLat = lonLat;
graphView.dm().add(node);
return node;
}



相关推荐
内容概要:本文详细介绍了基于TMS320F系列芯片的C2000串口读写方案及其编程器——FlashPro2000的功能特点和支持的接口模式。文中不仅涵盖了硬件连接的具体步骤,还提供了代码实例来展示Flash擦除操作,并对比了JTAG和SCI-BOOT两种模式的优缺点。此外,针对不同型号的C2000系列芯片,给出了详细的适配指导以及避免烧录过程中可能出现的问题的方法。 适合人群:从事DSP开发的技术人员,尤其是对TI公司C2000系列芯片有一定了解并希望深入了解其编程和烧录细节的人群。 使用场景及目标:适用于实验室环境下的程序调试阶段,以及生产线上的批量烧录任务。主要目的是帮助开发者选择合适的编程工具和技术手段,提高工作效率,减少因误操作导致设备损坏的风险。 其他说明:文中提供的代码片段和命令行指令可以直接用于实际项目中,同时附带了一些实用技巧,如防止芯片变砖的小贴士和自动化重试脚本,有助于解决常见的烧录难题。
汉字字库存储芯片扩展实验 # 汉字字库存储芯片扩展实验 ## 实验目的 1. 了解汉字字库的存储原理和结构 2. 掌握存储芯片扩展技术 3. 学习如何通过硬件扩展实现大容量汉字字库存储 ## 实验原理 ### 汉字字库存储基础 - 汉字通常采用点阵方式存储(如16×16、24×24、32×32点阵) - 每个汉字需要占用32字节(16×16)到128字节(32×32)不等的存储空间 - 国标GB2312-80包含6763个汉字,需要较大存储容量 ### 存储芯片扩展方法 1. **位扩展**:增加数据总线宽度 2. **字扩展**:增加存储单元数量 3. **混合扩展**:同时进行位扩展和字扩展 ## 实验设备 - 单片机开发板(如STC89C52) - 存储芯片(如27C256、29C040等) - 逻辑门电路芯片(如74HC138、74HC373等) - 示波器、万用表等测试设备 - 连接线若干 ## 实验步骤 ### 1. 单芯片汉字存储实验 1. 连接27C256 EPROM芯片到单片机系统 2. 将16×16点阵汉字字库写入芯片 3. 编写程序读取并显示汉字 ### 2. 存储芯片字扩展实验 1. 使用地址译码器(如74HC138)扩展多片27C256 2. 将完整GB2312字库分布到各芯片中 3. 编写程序实现跨芯片汉字读取 ### 3. 存储芯片位扩展实验 1. 连接两片27C256实现16位数据总线扩展 2. 优化字库存储结构,提高读取速度 3. 测试并比较扩展前后的性能差异 ## 实验代码示例(单片机部分) ```c #include <reg52.h> #include <intrins.h> // 定义存储芯片控制引脚 sbit CE = P2^7; // 片选 sbit OE = P2^6; // 输出使能 sbit
测控装备干扰源快速侦测系统设计研究.pdf
嵌入式八股文面试题库资料知识宝典-【开发】嵌入式开源项目&库&资料.zip
嵌入式八股文面试题库资料知识宝典-百度2022年嵌入式面试题.zip
少儿编程scratch项目源代码文件案例素材-空间站.zip
基于关联规则的商业银行个性化产品推荐.pdf
嵌入式八股文面试题库资料知识宝典-Linux基础使用.zip
内容概要:本文详细介绍了利用MATLAB进行轴棱锥生成贝塞尔高斯光束及环形光束光强图像的仿真研究。首先阐述了实验的背景与目标,强调了MATLAB在光学和计算科学领域的广泛应用。接着,具体描述了实验的方法与步骤,包括材料准备、仿真过程中的参数设定和光束生成代码编写。最后,对实验结果进行了深入分析,展示了贝塞尔高斯光束和环形光束的光强分布特点,验证了其光学性能的预期表现。文章还对未来的研究方向和技术改进提出了展望。 适合人群:从事光学、物理学及相关领域研究的专业人士,特别是对光束生成和光学性能分析感兴趣的科研工作者。 使用场景及目标:适用于需要进行光束生成和性能分析的实验室环境,旨在帮助研究人员更好地理解和优化光束特性和传播行为。 其他说明:本文不仅提供了详细的实验方法和步骤,还附有丰富的实验结果和数据分析,为后续研究提供了宝贵的参考资料。
内容概要:本文探讨了三电平NPC型有源电力滤波器(APF)的模型预测控制(MPC)中存在的开关频率过高问题及其解决方案。传统MPC方法会导致极高的开关频率,增加了系统的能耗和热量。通过引入滞环控制模块,可以在不大幅牺牲性能的情况下有效降低开关频率。具体来说,滞环控制通过在价值函数计算后增加一个判断条件,对状态切换进行惩罚,从而减少不必要的开关动作。实验结果显示,开关频率从4392Hz降至3242Hz,降幅达26.2%,虽然电流总谐波畸变率(THD)略有上升,但仍符合国家标准。此外,文中还提出了动态调整滞环宽度的方法,以进一步优化不同负载条件下的表现。 适合人群:从事电力电子、电力系统控制领域的研究人员和技术人员,特别是关注APF和MPC技术的人群。 使用场景及目标:适用于需要优化APF系统开关频率的研究和工程项目,旨在提高系统效率并降低成本。目标是在不影响系统性能的前提下,显著降低开关频率,减少能量损失和热管理难度。 其他说明:文章不仅提供了理论分析,还包括具体的实现代码片段,有助于读者理解和实践。同时,强调了在实际应用中需要注意的问题,如中点电位漂移等。
内容概要:本文介绍了三维POD DMD程序在处理原网格数据方面的独特优势和技术细节。首先阐述了该程序能读取结构化和非结构化网格数据及其拓扑关系,在生成模态数据过程中保持原始网格形态而不需要进行网格插值操作。接着展示了简化版本的Python代码片段,揭示了读取网格数据和生成模态数据的核心逻辑。最后提到提供的辅助学习资料如代码、视频教程、Word教程和实例数据,帮助用户深入理解并掌握该程序的应用。 适合人群:从事计算流体力学领域的研究人员和技术爱好者,尤其是那些希望提高数据处理效率的人群。 使用场景及目标:适用于需要处理复杂网格数据的研究项目,旨在简化数据处理流程,提升工作效率,同时保持数据的原始特性。 其他说明:文中不仅提供了理论性的讲解,还有具体的代码示例和丰富的学习资源,使读者可以边学边练,快速上手。
融合双向路由注意力的多尺度X光违禁品检测.pdf
嵌入式八股文面试题库资料知识宝典-Linux_Shell基础使用.zip
嵌入式八股文面试题库资料知识宝典-联发科2021武汉嵌入式软件开发.zip
基于有限体积法Godunov格式的管道泄漏检测模型研究.pdf
嵌入式八股文面试题库资料知识宝典-ARM常见面试题目.zip
基于LWR问题的无证书全同态加密方案.pdf
嵌入式八股文面试题库资料知识宝典-符坤面试经验.zip
内容概要:本文详细探讨了三电平逆变器在带不平衡负载条件下的仿真研究。主要内容包括仿真环境的搭建、不同拓扑结构的选择(如T型、I型NPC和ANPC)、延时相消法(DSC)和双二阶广义积分器(DSOGI)的正负序分离控制策略、SVPWM或SPWM调制技术的应用、双闭环PI控制以及直流均压控制。文中通过具体的参数设置(交流电压220V,直流侧电压750V)进行了详细的仿真实验,并展示了各个控制策略的效果。最终,通过仿真实验验证了所提出方法的有效性,确保了交流侧三相电压波形的对称性和电流波形的自适应调节。 适合人群:从事电力电子、电机驱动、新能源发电等领域研究的技术人员和研究人员。 使用场景及目标:适用于需要理解和掌握三电平逆变器在复杂负载条件下控制策略的研究人员和技术人员。目标是提高对三电平逆变器及其控制策略的理解,优化实际应用中的性能。 其他说明:本文不仅提供了理论分析,还包含了具体的仿真步骤和代码实现,有助于读者更好地理解和应用相关技术。
内容概要:本文介绍了如何使用Matlab/Simulink软件构建一个14自由度的四轮驱动-四轮转向(4WID-4WIS)整车动力学模型。该模型涵盖了整车纵向、横向、横摆、车身俯仰、侧倾、垂向跳动及四轮旋转和垂向自由度等多个方面,旨在全面反映车辆在不同工况下的动态行为。文中详细描述了各子系统的建模方法,包括转向系统、整车系统、悬架系统、魔术轮胎pac2002、车轮系统和PI驾驶员模块。同时,提供了Simulink源码文件、建模说明文档及相关参考资料,便于用户理解和应用。 适用人群:主要面向汽车工程师、研究人员以及对汽车动力学和Simulink建模感兴趣的学习者。 使用场景及目标:①帮助用户深入了解车辆在各种工况下的动态行为;②为车辆控制策略的制定提供理论支持和技术手段;③作为学习和研究整车动力学建模的有效工具。 其他说明:该模型采用模块化建模方法,提高了模型的清晰度和可维护性,同时也提升了建模效率。