
memcached协议
旧版:http://code.sixapart.com/svn/memcached/trunk/server/doc/protocol.txt
新版:https://github.com/memcached/memcached/blob/master/doc/protocol.txt
一、协议
memcached的客户端使用TCP连接同memcached进行交互,memcached服务器监听指定的端口(默认端口是11211)。Client连接到memcached服务器,发送指令,获取数据,然后关闭连接。
通常没有必要发送任何命令来关闭某个会话。客户端可以在任何时候关闭不需要的连接。然而,通常鼓励客户端缓存这些连接,因为memcached服务器本身就被设计成为一个可以支持成百上千个连接的服务器,而客户端缓存了连接后,就可以避免重复的建立连接的开销。
memcached协议中包含两部分数据,文本行和非结构化数据。前者是来自客户端的命令或来自服务器端的响应,后者代表客户端存取的数据。命令以\r\n结尾,数据可以是\r,\n或者\r\n结尾来标识各自部分的结束。
二、键
memcached一般通过key来存储,一个key的长度一般不能超过250字符。key不能包含控制字符或空白字符
三、命令
有三种类型的命令:
1、存储命令:set、add、replace、append、prepend、cas
2、读取命令:get、gets
3、第三种命令,不涉及到非结构化数据。客户端发出这样的命令,服务端会返回响应结果
1、过期时间
过期时间的取值,有两种:一种是Unix时间(自1970.1.1开始到现在的秒数),另一种是相对当前时间的秒数。如果过期时间的秒数大于60*60*24*30(即30天),则服务端认为是Unix时间。
2、错误设置
客户端发出的每个命令,服务端可能会返回错误提示字符。错误提示字符有如下三种:
1) ERROR\r\n :表示客户端发送的命令不存在
2) CLIENT_ERROR <error>\r\n :表示客户端的输入有错误
3) SERVER_ERROR <error>\r\n :服务器端的错误
3、存储命令:
命令格式:<command name> <key><flags> <exptime> <bytes> [noreply]\r\n
命令名:如set、add、replace、append、prepend
|
命令名称 |
作用 |
|
set |
存储这个数据 |
|
add |
存储这个数据,当且仅当这个key不存在的时候 |
|
replace |
存储这个数据,当且仅当这个key存在 |
|
append |
将数据存放在已存在的key对应的内容的后面,忽略<flags>和<exptime> |
|
prepend |
将数据存放在已存在的key对应的内容的前面,忽略<flags>和<exptime> |
|
cas |
存储这个数据,当且仅当该数据自从最后被获取到现在没有被更新 |
flags:一个任意的32位(旧版本是16位)无符号整数
exptime:过期时间,如果为0,表示永不过期。单位秒
bytes:表示将要存储的数据的字节数,可以为0。要存储的内容的字节数,必须等于该值,不能大于也不能小于。
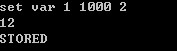
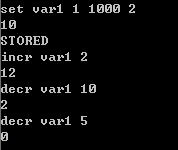
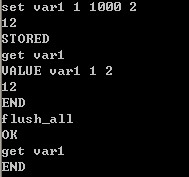
例子:将一个整数12,存放到memcache中,key为var,flags为1,过期时间为1000,字节数为2
用telnet连接memcached服务器端:

输入命令如下:set var 1 1000 2,然后按回车,之后输入要存储是数据:12,按回车,服务器返回STORED,如下:
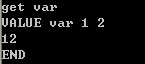
通过get命令查看刚才存储的内容:
4、获取命令
格式:
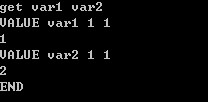
get <key>*\r\n
gets <key>*\r\n
<key>*,表示可以有多个key,各个key之间用空格隔开。
执行该命令,服务器返回0个或多个item,每个item的格式如下:
VALUE <key> <flags><bytes> [<cas unique>]\r\n
<data block>\r\n
bytes为数据内容的长度,data block为key对应的数据内容
例子:
5、删除命令
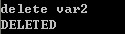
格式: delete <key> [noreply]\r\n
noreply参数,告诉服务器不用发送响应
该命令的返回结果,可能是:
DELETE\r\n 表示删除成功
NOT_FOUND\r\n 没有对应的key
例子:
6、增加/减少命令
命令格式:
incr <key> <value> [noreply]\r\n 或 decr <key> <value> [noreply]\r\n
value为要增加或减少的值。
操作成功,服务器返回操作之后的值。
对于decr操作,如果操作之后的值小于0,则置为0
不能直接使用incr和decr,必须先set或者add后再使用,而且值为数字类型,在增加时,存储的区域会扩展。
例子:
7、touch
该命令用来更新已存在的item的过期时间,格式如下:(低版本不支持该命令)
touch <key> <exptime> [noreply]\r\n
执行该命令后,如果返回”TOUCHED\r\n”,则执行成功
8、统计命令
命令格式:
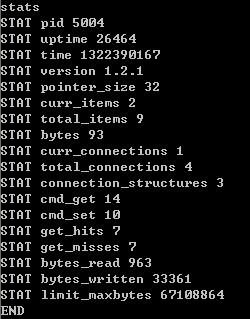
1) stats\r\n 查看通用的统计信息
2) stats <args>\r\n
通用统计信息,例子:
具体含义:
|
名称 |
类型 |
含义 |
|
pid |
32u (32位无符号整数) |
memcached server的pid |
|
uptime |
32u |
memcached server自启动到现在的时间(秒) |
|
time |
32u |
当前UNIX的时间 |
|
version |
string |
memcached server的版本号 |
|
pointer_size |
32 |
操作系统默认的指针大小 |
|
curr_items |
32u |
当前存储的item数目 |
|
total_items |
32u |
server从启动到现在,总共累计存储的item数目 |
|
bytes |
64u |
当前存储item所花费的字节数 |
|
curr_connections |
32u |
当前的客户端连接数 |
|
total_connections |
32u |
server从启动到现在,累计的客户端连接数 |
|
connection_structures |
32u |
server分配的连接结构数 |
|
cmd_get |
64u |
get的次数 |
|
cmd_set |
64u |
set的次数 |
|
get_hits |
64u |
get命中的次数 |
|
get_misses |
64u |
get没有命中,miss的次数 |
|
evictions |
64u |
为新的item释放内存空间而被移除的有效item的数目。如果cache的size比较小,则淘汰策略经常发生 |
|
bytes_read |
64u |
从cache中读取的总字节数 |
|
bytes_written |
64u |
写入cache的总字节数 |
|
limit_maxbytes |
32u |
该memcached server分配的最大内存数量 |
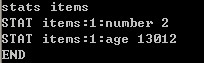
9、item统计信息
stats命令后面带上参数:items。 返回存储在每个slab的item信息,格式如下:
STAT items:<slabclass>:<stat><value>\r\n
例子:

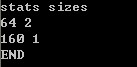
10、itemsize统计信息
stats命令后面带上参数sizes,返回存储在cache中的总体大小及item数目。
注意:该命令会锁住cache,它会遍历每个item并计算大小,在此之间,我们是无法访问server的,因此要慎重使用该命令。
返回结果的格式如下:
<size> <count>\r\n
其中:
'size' is an approximate size of the item,within 32 bytes.
'count' is the amount of items that existwithin that 32-byte range.
例子:
11、slab统计信息
stats命令带上参数slabs,返回memcached运行期间创建的每个slab的信息。
数据格式:STAT <slabclass>:<stat> <value>\r\n
例子:
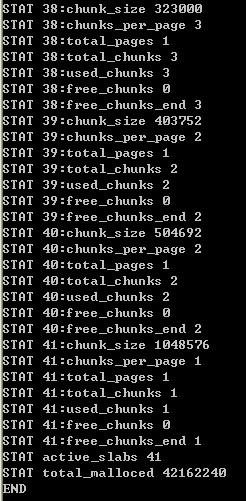
|
名称 |
含义 |
|
chunk_size |
每个块的大小。一个item使用一个大小适当的块。 |
|
chunks_per_page |
一页的块数,一页的默认大小小于等于1M,,chunks_per_page * chunk_size = 1MB。 slab按页分配,每页划分成不同的块 |
|
total_pages |
分配给slab的页数 |
|
total_chunks |
分配给slab的块数 |
|
used_chunks |
已分配给item的块数 |
|
free_chunks |
未分配给item的块数 |
|
free_chunks_end |
目前可以使用的块数 |
|
mem_requested |
请求存储在该slab的字节数 |
|
active_slabs |
已经分配的slab数量 |
|
total_malloced |
已经分配给slab的字节数 |
item存放在slab中,该slab的大小大于或等于该item的大小。mem_requested表示一个slab中所有item的大小。
total_chunks * chunk_size – mem_requested,表示一个slab中所浪费的内存大小。如果有很多浪费,则需要考虑调整slab因子
12、其他命令
1) flush_all :执行该命令,将导致memcache中所存在的所有item都失效。也可以指定在一段时间之后失效。例子:
2) version : 查看memcache的版本号
3)quit :关闭连接



相关推荐
内容概要:本文探讨了高比例可再生能源接入对电力系统调峰能力的影响,提出了一种基于净负荷波动的调峰成本量化与分摊模型。首先,通过将负荷和可再生能源出力曲线转换为无波动的均值线,构建了无调峰需求的替代场景。接着,建立了含深度调峰和抽水蓄能的调度优化模型,用于计算不同场景下的调峰成本。通过比较有无调峰需求两种场景下的系统调峰成本,确定了单一主体导致的边际调峰成本,并采用Shapley值方法合理分摊调峰成本。研究表明,该模型可以有效反映各主体的调峰成本或贡献,有助于促进可再生能源的消纳和电力系统的稳定运行。 适合人群:从事电力系统规划、运营管理和可再生能源研究的专业人士,以及关注能源政策和技术发展的研究人员。 使用场景及目标:适用于评估和优化高比例可再生能源接入条件下的电力系统调峰成本,旨在提高电力系统的灵活性和经济性,同时促进可再生能源的有效利用。 其他说明:该模型需要根据实际情况进行调整和优化,以适应不同地区的电力市场特点和技术水平。
内容概要:本文详细介绍了如何使用博图V16进行ABB机器人的外部启动及其与西门子设备的Profinet通讯配置。首先概述了ABB机器人和博图V16的基本概念,接着深入讲解了外部启动的重要性和实现方式,重点介绍了FB功能块的应用,以及Profinet通讯的具体配置步骤。文中还强调了GSD文件的作用,用于描述机器人的属性和行为,最后讨论了硬件配置的要求和注意事项,特别是对dsqc1030或dsqc652板卡的支持和888-2或888-3选项的需求。 适合人群:从事工业自动化领域的工程师和技术人员,尤其是那些负责机器人集成和编程的专业人士。 使用场景及目标:适用于需要将ABB机器人与西门子设备通过Profinet网络进行通讯并实现外部启动的项目。目标是提高自动化生产线的灵活性和效率,确保机器人和PLC之间的无缝协作。 其他说明:本文不仅提供了理论指导,还包含了实际操作中的关键细节,有助于读者快速掌握相关技能并在实践中应用。
scratch少儿编程逻辑思维游戏源码-3D环境.zip
少儿编程scratch项目源代码文件案例素材-泼溅猫.zip
内容概要:本文介绍了基于EMD-ARMA的组合风光出力预测方法,详细阐述了经验模态分解(EMD)和自回归移动平均(ARMA)模型的应用步骤。首先,通过EMD将原始发电数据分解为多个本征模态函数(IMF),然后用ARMA模型对各IMF分量进行建模和预测,最后将预测结果叠加重构,获得最终的风光功率预测值。文中还提供了简化的Python代码示例,帮助读者理解和实现该方法。 适合人群:从事新能源研究和技术开发的专业人士,尤其是对风光发电预测感兴趣的科研人员和工程师。 使用场景及目标:适用于需要提高风光发电预测精度的项目,旨在通过先进的数学模型优化电力调度和资源配置。 其他说明:本文提供的代码示例仅用于教学目的,实际应用中需根据具体情况调整和完善。此外,建议在实践中参考更多专业文献和寻求专家意见以确保预测模型的准确性和可靠性。
scratch少儿编程逻辑思维游戏源码-scratch RPG 战斗.zip
scratch少儿编程逻辑思维游戏源码-窗户冒险.zip
scratch少儿编程逻辑思维游戏源码-FC经典游戏 沙罗曼蛇.zip
少儿编程scratch项目源代码文件案例素材-跑酷版《我的世界》.zip
scratch少儿编程逻辑思维游戏源码-抜刀.zip
内容概要:本文介绍了永磁同步电机(PMSM)无位置传感器控制的一种创新方法,重点探讨了通过反电动势估计和扰动观测器增益设计来实现转子位置的精确估算。该方法避免了传统的PLL等位置观测器,仅需一次反正切计算即可获得转子位置,极大简化了系统复杂度。此外,模型控制器采用离散域设计,便于参数调整和适应不同电机参数。文中还提供了具体的Python代码示例,展示了从初始化电机参数到主循环控制的具体实现步骤。 适合人群:从事电机控制系统设计的研究人员和技术工程师,尤其是关注永磁同步电机无传感器控制领域的专业人士。 使用场景及目标:适用于需要简化调试流程、提高系统灵活性和适应多种电机参数的应用场景。主要目标是在保持高性能的同时降低硬件成本和系统复杂性。 其他说明:该方法不仅简化了调试过程,还提高了系统的鲁棒性和可靠性,特别适合于工业自动化、机器人技术和电动汽车等领域。
内容概要:本文深入探讨了乘用车双腔制动主缸的精细化建模及其在Simulink和Amesim中的联合仿真验证。文章首先介绍了双腔制动主缸的物理结构和动力学方程,特别是考虑了液压特性和机械传动的耦合关系。接着,作者详细描述了如何在Simulink中实现这些模型,并通过S函数处理变步长积分问题,确保仿真精度。此外,还讨论了联合仿真过程中遇到的数据交换频率问题,并提出了使用二阶保持器来补偿相位滞后的解决方案。最终,通过对不同推杆力输入条件下的仿真结果对比,验证了精细化模型的有效性和稳定性。 适合人群:从事汽车制动系统研究的技术人员、高校相关专业师生、对车辆动力学仿真感兴趣的工程师。 使用场景及目标:①帮助研究人员更好地理解和掌握双腔制动主缸的工作原理;②为后续更复杂的整车制动系统仿真提供可靠的子系统模型;③提高仿真精度,减少因模型简化带来的误差。 其他说明:文中提供了详细的建模步骤、公式推导、代码实现以及仿真结果对比,附带完整视频教程和参考资料,便于初学者学习。同时强调了实际应用中需要注意的关键细节,如流量计算、数据交换频率调整等。
scratch少儿编程逻辑思维游戏源码-Scratch版Windows11.zip
少儿编程scratch项目源代码文件案例素材-青蛙.zip
内容概要:本文详细介绍了光伏交直流混合微电网在离网(孤岛)模式下的双下垂控制仿真模型。该模型利用Matlab/Simulink工具进行构建和仿真,涵盖了直流微电网、交流微电网以及互联变换器(ILC)的结构和控制策略。直流微电网采用电压电流双闭环下垂控制,交流微电网则通过恒压控制和下垂控制来维持稳定的频率和电压。ILC采用双下垂控制策略,通过归一化处理和偏差调整,使得交流母线频率和直流母线电压趋于一致。此外,模型还包括采样保持、坐标变换、功率滤波、SVPWM等辅助环节,以确保系统的稳定运行和高效能量管理。实验结果显示,在负载突增的情况下,系统依然能够保持良好的波形质量和稳定性。 适合人群:对微电网控制系统感兴趣的科研人员、电力工程技术人员及高校师生。 使用场景及目标:适用于研究和验证光伏交直流混合微电网在离网模式下的控制策略,特别是双下垂控制的应用效果。目标是提升微电网的稳定性和能量管理效率。 其他说明:仿真环境为Matlab2020b及以上版本,部分模块仅支持高版本软件。对于希望深入了解双下垂控制机制的研究者,可以通过进一步的学习和交流获得更多信息。
内容概要:本文详细介绍了基于扩展卡尔曼滤波器(EKF)的INS(惯性测量单元)和GPS(全球定位系统)松组合导航技术。首先解释了为何需要松组合导航,即通过融合INS和GPS的优势,提高定位的稳定性和准确性。接着阐述了15状态下的EKF融合方法,涵盖速度、姿态、位置等多个系统动态参数的估计与更新。然后讨论了NED(北东地)坐标系的应用及其带来的直观物理意义。最后提供了简化的Python代码片段,演示了如何在EKF中融合INS和GPS数据,以获得连续、稳定的导航结果。 适合人群:从事导航技术研发的专业人士,尤其是对EKF、INS、GPS以及多传感器数据融合感兴趣的工程师和技术研究人员。 使用场景及目标:适用于需要高精度、高可靠性定位系统的应用场景,如自动驾驶汽车、无人机飞行控制系统等。目标是通过融合INS和GPS数据,克服单一传感器的局限性,提升整个导航系统的性能。 其他说明:文中提供的代码仅为概念验证性质,实际工程应用中还需考虑更多复杂的因素和优化措施。
内容概要:本文详细介绍了基于MATLAB Simulink平台的三相逆变器稳压控制仿真模型,重点探讨了孤岛运行环境下的电压电流双闭环控制策略及其LCL滤波电路的应用。首先,通过对主电路电流电压的采样并进行Park和Clark变换,将数据转换为dq坐标系下的电流电压值,然后输入双闭环控制系统进行精确调节。接着,通过反变换回到abc坐标系,并利用PWM调制对逆变器进行控制,最终实现了电压电流的稳定输出。文中还提供了简化的Matlab代码片段,展示了关键步骤的具体实现方法。此外,作者通过多次仿真实验验证了该控制策略的有效性和鲁棒性。 适合人群:从事电力电子、自动化控制领域的研究人员和技术人员,尤其是对逆变器控制策略感兴趣的读者。 使用场景及目标:适用于需要深入了解三相逆变器在孤岛运行环境下的稳压控制机制的研究人员和技术人员。目标是掌握电压电流双闭环控制策略以及LCL滤波电路的设计与应用,提高逆变器系统的稳定性和可靠性。 其他说明:本文不仅提供了理论分析,还包括具体的仿真模型和代码示例,有助于读者更好地理解和实践相关技术。
少儿编程scratch项目源代码文件案例素材-七龙珠RPG 测试.zip
scratch少儿编程逻辑思维游戏源码-城市世界.zip
少儿编程scratch项目源代码文件案例素材-黏糊糊的圣诞节.zip