hudeyong926
- 浏览: 2042713 次
- 来自: 武汉
-

最新评论
-
carry0987:
求大神分離下X3的模板...不然對於PHP7不友好啊...
分离自Discuz模板类和语法 -
青木得海角:
你好,里面的 Crypt/TripleDES.php 和 Cr ...
POS机算法 -
zohog:
楼主,Mac.php中里面的 Crypt/TripleDES. ...
POS机算法 -
zohog:
楼主,Mac.php中里面的 Crypt/TripleDES. ...
POS机算法 -
q59200182:
能不能给个完整的demo 新手上路不会 求带
AngularJs 指令directive之controller,link,compile







相关推荐
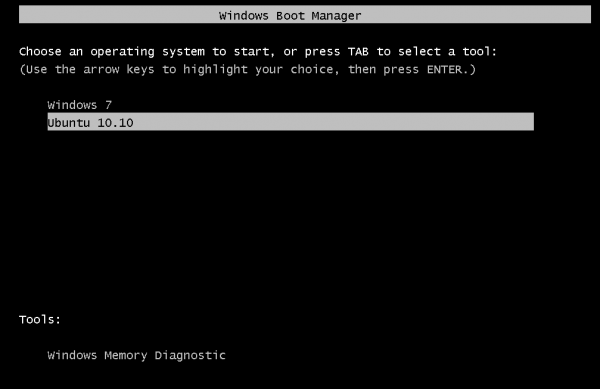
以上就是使用EasyBCD修复Linux和Windows 7双系统启动问题的详细步骤。整个过程涉及了Windows和Linux的引导管理,以及GRUB的配置和修复。需要注意的是,每个用户的系统环境可能会有所不同,因此在实际操作时应根据...
问题f) 使用Legacy模式重装系统时遇到GPT硬盘格式错误,是因为Legacy模式不支持GPT分区。此时应切换到UEFI模式进行安装,因为UEFI模式支持GPT分区,更适合现代硬盘。 在安装双系统时,尤其是对于新手,建议遵循详细...
【标签】: Linux, Ubuntu, Windows 7, 双系统, 硬盘安装 **详细步骤** 1. **准备工作** - 下载Ubuntu 10.10的官方ISO镜像文件。 - 安装EasyBCD,这是一个简单易用的系统引导管理器,用于创建Ubuntu的启动项。 -...
内容概要:本文详细介绍了如何使用COMSOL软件进行堤坝边坡稳定性的流固耦合分析。首先构建了一个二维梯形断面堤坝模型,设置了合理的土体参数,特别是采用了Mohr-Coulomb准则来描述土体行为。接着,在流固耦合接口中引入了固体力学和多孔介质流动模型,确保孔隙水压力对土体应力的影响得到充分考虑。文中还讨论了边界条件的设定,如坝基固定约束、下游坡面自由以及上游水位骤降工况,并提供了具体的MATLAB代码示例。此外,针对求解过程中可能出现的收敛问题提出了优化建议,强调了网格划分的重要性及其对计算效率的影响。最后,通过分析塑性应变集中区和剪切应变率积分量来进行实时预警。 适合人群:从事岩土工程、水利工程等相关领域的研究人员和技术人员,尤其是对流固耦合仿真感兴趣的工程师。 使用场景及目标:适用于需要评估堤坝边坡稳定性的工程项目,旨在提高对复杂地质条件下边坡行为的理解,提供更加精确的安全评估手段。 其他说明:文中不仅涵盖了详细的建模步骤和技术细节,还包括了许多实用的经验分享和技巧提示,有助于读者更好地掌握COMSOL流固耦合仿真的应用。
内容概要:本文详细介绍了Scrum.org专业敏捷领导力认证(PAL I)的相关信息,包括考试概述、考试详情、考试大纲、样题和备考建议。PAL I考试包含36道选择题,考试时长为60分钟,通过分数为85%,考试费用为200美元。考试内容涵盖Scrum框架的理解与应用、Scrum团队、事件、工件、完成定义、扩展、人员与团队的发展、领导风格、教练与指导、产品管理、持续质量、优化流程以及敏捷组织的演变等多个方面。通过认证有助于职业发展,提供新的就业机会、更高的薪酬或内部认可。 适合人群:希望获得Scrum.org专业敏捷领导力认证的个人,特别是那些希望提升敏捷管理技能并在组织中推动敏捷转型的领导者和管理者。 使用场景及目标:①帮助考生深入了解Scrum框架及其核心概念;②掌握Scrum团队运作、事件、工件和扩展的实际应用;③理解并应用敏捷领导风格、教练与指导技巧;④学习如何在复杂环境中管理和交付产品;⑤掌握持续质量管理和优化流程的方法;⑥了解如何在传统组织中实施敏捷变革。 阅读建议:备考过程中应先熟悉PAL I考试大纲,制定合理的复习计划。建议参加Scrum.org提供的官方培训课程,多做样题和模拟考试,通过实践不断巩固所学知识。此外,利用ProcessExam.com提供的在线练习测试,评估自己的强项和弱项,有针对性地进行准备,直到能够在模拟考试中取得高分。
DP Model 联动插件 MAX2018
内容概要:本文详细介绍了单向光伏储能逆变器的工作原理和技术要点。首先,文章解释了单向储能逆变器的硬件拓扑结构,包括光伏Boost电路、电池双向DC/DC和离网逆变器。接着,深入探讨了最大功率点跟踪(MPPT)算法的具体实现,如扰动观察法及其改进版本变步长追踪法。此外,还讨论了电池管理系统中的充电状态机以及逆变环节中的PWM配置和数字PI调节器的应用。文中提供了具体的代码示例来帮助理解各个控制策略,并分享了一些实际工程项目中的经验和教训,如温度补偿对PWM死区时间的影响、负载突变时的稳压措施等。 适合人群:从事光伏储能系统设计与开发的技术人员,尤其是有一定电子电路和嵌入式编程基础的研发人员。 使用场景及目标:适用于希望深入了解单向光伏储能逆变器内部工作机制的专业人士,旨在提高他们在MPPT算法优化、电池保护机制设计以及逆变控制方面的技能水平。 其他说明:文章不仅涵盖了理论知识,还包括了许多来自真实项目的实践经验,为读者提供了一个全面的学习视角。
内容概要:本文详细介绍了分布式驱动电动汽车的七自由度动力学模型及其在Carsim与Simulink平台上的联合仿真验证。七自由度动力学模型涵盖车辆纵向、横向、横摆运动及四个车轮的转动,能够全面描述车辆的多维运动状态。文中通过具体代码示例解释了车轮转动自由度的计算方法,并探讨了扭矩分配策略对轮胎力动态变化的影响。联合仿真部分重点讲述了Carsim和Simulink之间的数据交互设置,包括仿真步长同步、双移线工况测试、轮胎模型选择等问题。此外,文章还提供了仿真过程中的一些实用技巧和注意事项,如版本兼容性、坐标系对齐等。 适合人群:从事汽车工程、车辆动力学仿真、自动驾驶技术研发的专业人士和技术爱好者。 使用场景及目标:适用于希望深入了解分布式驱动电动汽车动力学建模及仿真的研究人员和技术人员。目标是掌握七自由度动力学模型的具体实现方法,学会利用Carsim和Simulink进行联合仿真验证,提高对车辆复杂运动行为的理解和预测能力。 其他说明:文中提到的相关文件和工具可以帮助读者快速上手实践,同时附带的参考文献也为进一步研究提供了理论支持。
内容概要:本文详细介绍了2RC等效电路模型参数的离线辨识方法,涵盖数据预处理、微分方程建模、状态空间离散化以及参数辨识的具体步骤。首先,通过对实测电压电流数据进行时间戳对齐和滑动窗口去噪等预处理手段,确保输入数据的质量。接着,基于2RC模型的状态方程,采用离散化方法避免数值不稳定问题。参数辨识部分提供了两种主要方法:分段线性回归适用于高质量数据,而全局优化法则利用遗传算法和最小二乘法结合,能够处理复杂的非线性关系并防止过拟合。文中还强调了OCV-SOC曲线的准确性对R0估计的影响,并给出了具体的代码实现和优化技巧。 适用人群:从事电池管理系统(BMS)开发、电池建模研究的技术人员,尤其是有一定编程基础并对电池特性有一定了解的研发人员。 使用场景及目标:帮助工程师从实验室采集的充放电数据中提取有效的2RC等效电路模型参数,提高电池性能预测的准确性。具体应用场景包括但不限于电动汽车、储能系统等领域。 其他说明:附带完整的实验数据包、参数辨识工具箱及操作手册,提供了一键生成拟合对比图的验证脚本,便于用户快速上手实践。
内容概要:本文档详细介绍了多目标优化问题的建模与求解方法,特别是通过Python的PuLP库实现线性规划问题的具体步骤。文中构建了一个包含54个决策变量和三个目标函数(最大化RE、最小化Q、最小化fun1和fun2)的多目标优化模型,并添加了多种类型的约束条件,如资源约束、比例约束、需求满足约束、额外比例约束、总成本约束、混合约束、最大值约束、变量分解约束以及整数变量约束。为了有效求解这一复杂的多目标优化问题,文档提出了分层优化法和加权法两种策略,并详细展示了分阶段求解的过程。此外,还讨论了模型复杂度管理和求解器选择的优化建议,包括使用商业求解器(如Gurobi/CPLEX)、设置合理的MIPGap以及应用ε-约束法处理多目标问题。最后,文档提供了完整的代码实现,涵盖从问题初始化到结果输出的全过程。 适合人群:具备一定数学建模基础和编程经验的研究人员、工程师或数据科学家,尤其是对线性规划和多目标优化感兴趣的读者。 使用场景及目标:①帮助读者理解和掌握多目标优化问题的建模方法;②指导读者使用Python的PuLP库进行线性规划问题的求解;③提供分层优化法和加权法等多目标优化策略的应用实例;④通过具体案例展示如何处理复杂的约束条件和变量类型。 其他说明:本文档不仅提供了详细的理论分析,还附带了完整的代码实现,便于读者实践操作。建议读者在学习过程中结合代码进行调试,逐步理解每个步骤的作用和意义。此外,对于大规模或复杂问题,建议尝试使用更强大的求解器以提高求解效率。
炼石图解自然资源部自然资源领域数据安全管理办法V1.0.02024100页.pdf
内容概要:本文详细介绍了四套用于无线电能传输(WPT)的磁耦合谐振(MCR)模型,分别是LLC谐振器、LCC-S拓扑、LCC-P拓扑以及S-S拓扑补偿。每种模型都有独特的特点和应用场景。LLC谐振器专注于12/24V切换的闭环调频控制,LCC-S拓扑强调磁耦合系数对效率的影响及其补偿机制,LCC-P拓扑则致力于恒流输出的稳定性,而S-S拓扑提供了参数设计工具包,适用于初学者。文中不仅分享了具体的MATLAB/Simulink代码片段,还讨论了实际应用中的注意事项和技术细节。 适合人群:从事无线充电研究与开发的技术人员、高校师生及相关领域的研究人员。 使用场景及目标:帮助读者理解和掌握不同拓扑结构的工作原理及其在实际工程中的应用技巧,提高无线充电系统的性能和可靠性。同时,也为进一步的研究提供有价值的参考资料。 其他说明:文章通过实例展示了如何利用Simulink进行高效的仿真建模,并指出了一些常见的陷阱和解决方案。对于希望深入了解无线充电技术的人来说,是一份不可多得的学习材料。
1、文件说明: Centos8操作系统tesseract-langpack-khm-4.0.0-6.el8.rpm以及相关依赖,全打包为一个tar.gz压缩包 2、安装指令: #Step1、解压 tar -zxvf tesseract-langpack-khm-4.0.0-6.el8.tar.gz #Step2、进入解压后的目录,执行安装 sudo rpm -ivh *.rpm
内容概要:本文详细介绍了四旋翼飞行器编队避险飞行的Matlab仿真过程及其核心技术。首先探讨了编队控制的核心——分布式PID控制器,用于保持队形稳定。接着阐述了避障策略,采用势场法和动态窗口法相结合的方式,确保无人机能够灵活避开障碍物并迅速恢复编队。此外,文中还涉及了状态机控制逻辑、通信协议模拟、以及一些实用的调试技巧和优化措施。通过具体的代码示例和实验数据,展示了如何实现高效的编队飞行和避障操作。 适合人群:从事无人机技术研发的研究人员、工程师和技术爱好者。 使用场景及目标:适用于希望深入了解四旋翼飞行器编队控制和避障算法的设计与实现的专业人士。目标是在掌握相关理论的基础上,能够独立完成类似项目的开发和调试。 其他说明:文中提供的代码片段和仿真结果有助于读者更好地理解和实践所介绍的技术细节。同时,作者分享了许多宝贵的实战经验和注意事项,对于初学者来说非常有价值。
内容概要:本文详细介绍了如何利用COMSOL进行等离子体BIC(连续谱中的束缚态)仿真的方法和技术要点。首先,通过构建等离子体光栅模型并设置Drude模型参数,确保仿真环境的真实性和准确性。接着,探讨了周期性边界的正确设置以及参数化扫描的应用,强调了网格划分和后处理步骤的重要性。文中还提到了一些实用技巧,如引入随机几何误差以加速BIC的检测,以及如何通过电场模分布图和傅里叶变换确认BIC的存在。最后,讨论了等离子体BIC在光子晶体和超表面设计中的应用前景及其挑战。 适合人群:从事等离子体物理学、光子学及相关领域的科研人员和工程师,尤其是有一定COMSOL使用经验的研究者。 使用场景及目标:帮助研究人员理解和掌握COMSOL中等离子体BIC仿真的关键技术,提高仿真精度和效率,为设计高品质因子谐振器提供理论支持和技术指导。 其他说明:文中提供了大量具体的代码示例和实践经验,有助于读者快速上手并在实践中不断优化仿真模型。同时,强调了参数敏感性和数值稳定性的注意事项,避免常见错误。
内容概要:本文详细介绍了基于Matlab GUI界面的模糊车牌还原系统的设计与实现。该系统旨在解决因天气、车速等因素导致的车牌图像模糊问题,提供了一种便捷的解决方案。系统主要分为三个部分:一是通过uigetfile函数实现图像的选择与加载;二是对图像进行模糊处理,模拟现实中的模糊场景;三是提供四种不同的还原算法(维纳滤波、最小二乘法滤波、L-R循环边界法)供用户选择,每种算法针对不同类型的模糊情况有不同的优势。此外,还详细描述了Matlab GUI界面的设计,包括按钮、下拉菜单等功能的实现及其回调函数的编写。 适合人群:从事智能交通领域的研究人员和技术人员,特别是那些对图像处理和车牌识别感兴趣的人。 使用场景及目标:①帮助用户理解和掌握Matlab在图像处理方面的强大功能;②为模糊车牌的处理提供一种便捷的解决方案;③通过实际案例展示不同算法的效果,便于用户根据实际情况选择最合适的算法。 其他说明:文中不仅提供了详细的代码示例,还分享了一些实用的经验和技巧,如噪声估计、迭代次数设置等,有助于提高系统的稳定性和准确性。同时,作者也提到该系统已在某些实际场景中进行了测试并取得了良好的效果。
内容概要:本文详细介绍了如何在Matlab/Simulink中搭建光伏PV模型并网及储能系统,并深入探讨了MPPT(最大功率点跟踪)算法的不同实现方式及其优化。主要内容包括光伏PV模型的搭建,通过PV Array模块设置关键参数;MPPT算法的三种实现方法:扰动观察法、变步长扰动观察法和电导增量法,每种方法都附有详细的Matlab代码示例;并网及储能模型的搭建,涉及逆变器控制和储能电池的充放电控制策略。文中不仅提供了理论推导,还有具体的代码实现和调试技巧。 适合人群:从事可再生能源研究的技术人员、高校相关专业师生、对光伏系统感兴趣的工程师。 使用场景及目标:适用于希望深入了解光伏系统工作原理的研究人员,特别是希望通过仿真软件进行光伏系统设计和优化的人群。目标是掌握光伏PV模型的搭建方法,理解并实现不同的MPPT算法,学会并网及储能系统的控制策略,最终能够应用于实际工程项目中。 其他说明:文章强调了在实际操作过程中需要注意的问题,如参数的选择、代码的调试技巧等,帮助读者更好地理解和应用所学知识。此外,还提到了一些实用的小技巧,如使用HDL Code生成测试序列、通过FFT分析工具监控THD值等,进一步提高了仿真的准确性和实用性。
内容概要:本文详细介绍了针对图腾柱PFC(Power Factor Correction)电路的抖频技术和逃逸检测窗机制,旨在解决传统PFC电路因固定开关频率导致的电磁兼容性(EMC)问题。文中通过具体的伪代码展示了抖频算法的实现方法,如基于正弦表的频率抖动和伪随机序列生成,以及逃逸检测窗的时间窗过滤器设计。此外,还讨论了硬件层面的改进措施,如在驱动电阻上并联电容以分散开关振铃的能量。最终,经过一系列优化,EMC测试通过率显著提高,特别是在30MHz-1GHz频段的余量超过了6dB。 适合人群:从事电力电子设计、EMC测试及相关领域的工程师和技术人员。 使用场景及目标:适用于需要优化PFC电路EMC性能的场合,尤其是希望减少EMI(Electromagnetic Interference)干扰、提高产品合格率的研发团队。目标是通过抖频技术和逃逸检测窗机制,确保产品能够顺利通过严格的EMC测试。 其他说明:文中提到的具体参数和代码片段为伪代码,实际应用时需根据具体情况进行调整。同时,文中强调了调试过程中的一些关键经验,如抖频范围的选择和逃逸检测窗的时间窗口设定,这些都是成功实施该技术的关键因素。
内容概要:本文详细介绍了扫地机器人的路径规划方法,重点讨论了深度优先搜索(DFS)和随机碰撞两种算法。DFS算法通过系统地遍历每个节点,确保全面覆盖,适用于高效清洁;而随机碰撞算法则依赖随机性进行移动,适合应对动态环境。文中提供了这两种算法的具体实现代码,并对其优缺点进行了对比分析。此外,还探讨了实际应用中的挑战,如栅格离散化误差、物理惯性和动态障碍物的影响,以及混合使用两种算法的可能性。 适合人群:对机器人路径规划感兴趣的开发者和技术爱好者,特别是从事智能家居设备研究的专业人士。 使用场景及目标:帮助读者理解扫地机器人路径规划的基本原理,掌握DFS和随机碰撞算法的实现方式及其应用场景,从而能够应用于实际产品开发中。 其他说明:文章强调了路径覆盖率并不等于清洁效果,指出物理清洁部件的设计同样重要。同时提醒读者注意算法的实际部署问题,如防震荡机制和陀螺仪数据的结合。
内容概要:本文详细介绍了本杰明磁链模型在电机控制领域的应用,特别是在闭环带载启动方面的优势。文章首先展示了磁链模型的核心参数初始化及其精确性要求,接着深入探讨了磁链观测器的设计与实现,包括其微分方程、积分器以及遗忘因子的作用。文中还讨论了代码生成过程中遇到的问题及解决方案,如MATLAB生成代码的效率优化和查表法的应用。此外,文章介绍了带载启动的具体策略,包括转速-电流双闭环嵌套控制和滑模控制器的应用,并分享了实际测试数据和效果。最后,文章提供了调试经验和实战案例,强调了模型的鲁棒性和实用性。 适合人群:从事电机控制系统设计与开发的工程师和技术人员,尤其是关注高性能带载启动解决方案的专业人士。 使用场景及目标:适用于需要提高电机启动可靠性和稳定性的应用场景,如工业自动化设备、物流AGV等。目标是通过引入本杰明磁链模型,实现高效稳定的带载启动,减少启动时的电流波动和机械振动。 其他说明:本文不仅提供了理论分析,还包括大量实际代码示例和调试技巧,帮助读者更好地理解和应用这一先进技术。